User_Inst_Unity3DOnWindows
-
Please see platform support and external dependencies before.
-
Starting with version 2.1.1 of ROS#, the .NET solution supports multi-framework targeting, including
.NET Standard 2.1and.NET (Core) 8.0. Thus, it should work with the.NET Standard 2.1and.NET FrameworkAPI Compatibility Level in Unity settings, including theIL2CPPscripting backend. However,IL2CPPscripting backend support has only been tested to a limited extent on Windows. Full support for other platforms is not guaranteed. -
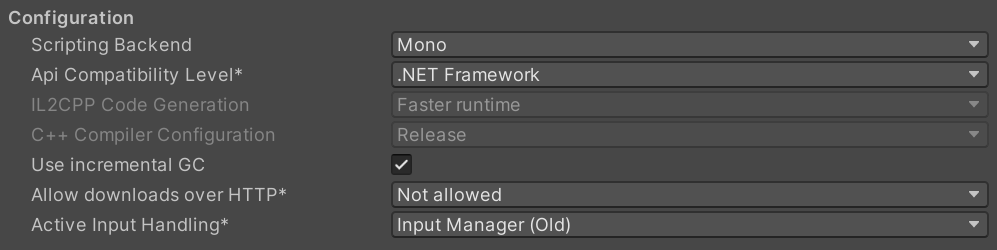
For older ROS# versions: Change scripting backend to Mono and api compatibility level to .NET Framework (.NET 4.x Equivalent for older versions), since it is required by RosBridgeClient. To do this:
- In the Unity menu, go to
Edit>Project Settings>Player. - In the Inspector pane, look under
Other Settings>Configuration. - Set
Scripting BackendtoMono. - Set
Api Compatibility Levelto.NET Framework.
- In the Unity menu, go to
-
Unity 6 support has not yet been thoroughly tested. However, some community members were able to use ROS# with Unity 6.
-
For Unity versions below 2022.3, a very old version of the Newtonsoft.JSON package comes preinstalled, and it conflicts with ROS# because we already include a newer version of it. So you have to remove it but Unity may not allow. In this case, find it in the
Packagesfolder (it's in the same directory with theAssetsfolder) in your file explorer and remove it manually.
Next tutorial: 1.2 Installing Ubuntu on Virtual Machine
© Siemens AG, 2017-2025