-
Notifications
You must be signed in to change notification settings - Fork 408
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Update names, titles and tags for examples with real data (#2416)
### What Updates the titles, and adds tags to all "python examples with real data" (a separate PR is needed for the "fake data" examples). Renames: | before | after | | --- | --- | | arkitscenes | arkit_scenes | | colmap | structure_from_motion | | deep_sdf | signed_distance_fields | | dicom | dicom_mri | | mp_pose | human_pose_tracking | | nyud | rgbd | | opencv_canny | live_camera_edge_detection | | ros | ros_node | | segment_anything | segment_anything_model | | stable_diffusion | depth_guided_stable_diffusion | | tracking_hf_opencv | detect_and_track_objects | In order to minimise merge issues, this is best updated and merged AFTER: - #2419 - #2420 - #2418 - #2424 - #2426 - #2360 TODO - [x] Update names script names - [x] Update any references to the scripts - [ ] ~~Mirror updates for Rust examples~~ (none of the renamed examples have rust counterparts) - [x] Convert tags to list - [x] Quick typo/grammar pass with pycharm's checker ### Checklist * [x] I have read and agree to [Contributor Guide](https://github.com/rerun-io/rerun/blob/main/CONTRIBUTING.md) and the [Code of Conduct](https://github.com/rerun-io/rerun/blob/main/CODE_OF_CONDUCT.md) * [ ] I've included a screenshot or gif (if applicable) <!-- This line will get updated when the PR build summary job finishes. --> PR Build Summary: https://build.rerun.io/pr/2416 <!-- pr-link-docs:start --> Docs preview: https://rerun.io/preview/3fb07ee/docs Examples preview: https://rerun.io/preview/3fb07ee/examples <!-- pr-link-docs:end --> --------- Co-authored-by: Antoine Beyeler <[email protected]>
- Loading branch information
1 parent
9393da6
commit 7c59e05
Showing
60 changed files
with
166 additions
and
126 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -17,7 +17,7 @@ covering how to use ROS 2 itself. If you are a Rerun user that is curious about | |
| please consult the [ROS 2 Documentation](https://docs.ros.org/en/humble/index.html) instead. | ||
|
|
||
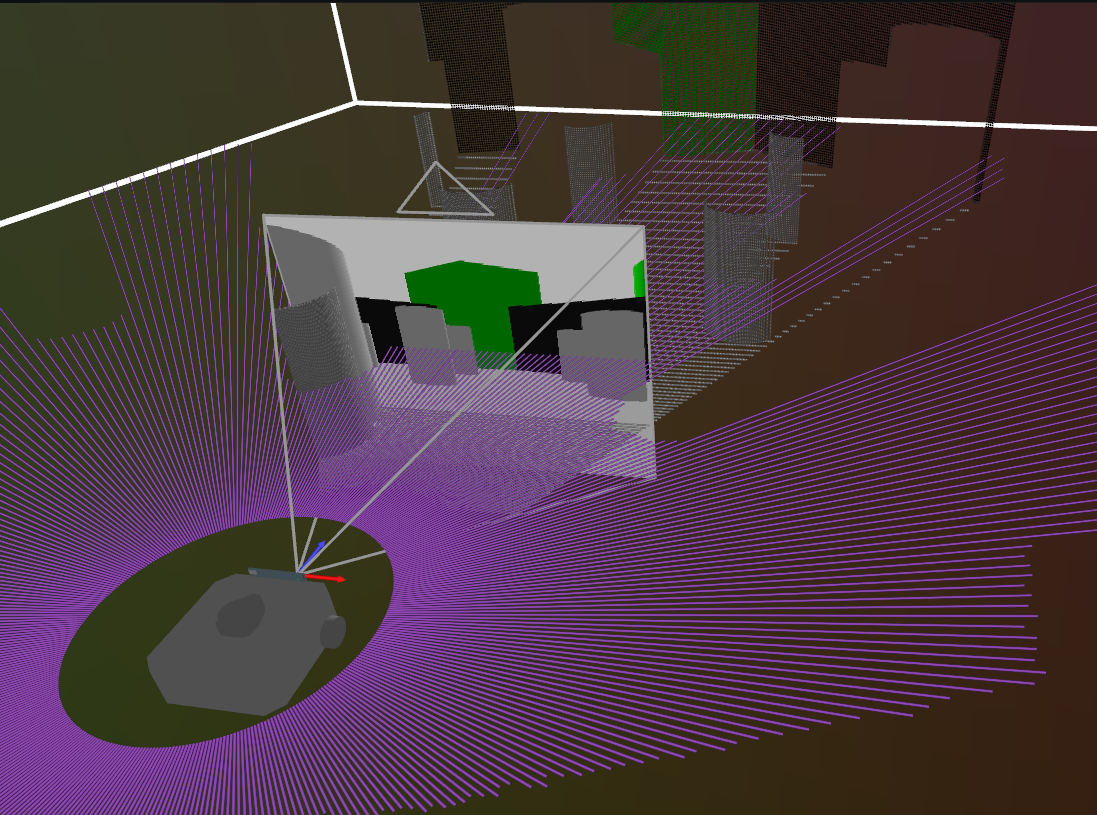
| All of the code for this guide can be found on GitHub in | ||
| [rerun/examples/python/ros](https://github.com/rerun-io/rerun/blob/main/examples/python/ros/). | ||
| [rerun/examples/python/ros_node](https://github.com/rerun-io/rerun/blob/main/examples/python/ros_node/). | ||
|
|
||
|  | ||
|
|
||
|
|
@@ -56,26 +56,26 @@ you should do so now: | |
| git clone [email protected]:rerun-io/rerun.git | ||
| cd rerun | ||
| ``` | ||
| The example code can be found in the folder: `examples/python/ros`. | ||
| The example code can be found in the folder: `examples/python/ros_node`. | ||
|
|
||
| In addition to the ROS dependencies, the Rerun node makes use of some dependencies specified in | ||
| [`requirements.txt`](https://github.com/rerun-io/rerun/blob/main/examples/python/ros/requirements.txt). | ||
| [`requirements.txt`](https://github.com/rerun-io/rerun/blob/main/examples/python/ros_node/requirements.txt). | ||
|
|
||
| Rerun recommends using `venv` (or the equivalent) to create an environment for installing these | ||
| dependencies. Note that *after* setting up your virtualenv you will need to activate your ROS2 | ||
| environment. | ||
| ```bash | ||
| $ python3 -m venv venv | ||
| $ source venv/bin/active | ||
| (venv) $ pip install -r examples/python/ros/requirements.txt | ||
| (venv) $ pip install -r examples/python/ros_node/requirements.txt | ||
| (venv) $ source /opt/ros/humble/setup.bash | ||
| ``` | ||
|
|
||
| ## Running the example | ||
|
|
||
| With the previous dependencies installed, and gazebo running, you should now be able to launch the Rerun ROS example: | ||
| ```bash | ||
| (venv) $ python3 examples/python/ros/main.py | ||
| (venv) $ python3 examples/python/ros_node/main.py | ||
| ``` | ||
|
|
||
| You should see a window similar to: | ||
|
|
@@ -103,7 +103,7 @@ If you are familiar with the turtlebot nav example and rviz, this view will like | |
|
|
||
| ## Code Explanation | ||
|
|
||
| It may be helpful to open [rerun/examples/python/ros/main.py](https://github.com/rerun-io/rerun/blob/main/examples/python/ros/main.py) | ||
| It may be helpful to open [rerun/examples/python/ros_node/main.py](https://github.com/rerun-io/rerun/blob/main/examples/python/ros_node/main.py) | ||
| to follow along. | ||
|
|
||
| Outside of TF, the node is mostly stateless. At a very high level, for each ROS message we are interested in, we create a | ||
|
|
@@ -337,7 +337,7 @@ def scan_callback(self, scan: LaserScan) -> None: | |
|
|
||
| ### URDF to `log_mesh` | ||
| The URDF conversion is actually the most complex operation in this example. As such the functionality | ||
| is split out into a separate [rerun/examples/python/ros/rerun_urdf.py](https://github.com/rerun-io/rerun/blob/main/examples/python/ros/rerun_urdf.py) | ||
| is split out into a separate [rerun/examples/python/ros_node/rerun_urdf.py](https://github.com/rerun-io/rerun/blob/main/examples/python/ros_node/rerun_urdf.py) | ||
| helper. | ||
|
|
||
| Loading the URDF from the `/robot_description` topic is relatively straightforward since we use | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,11 @@ | ||
| --- | ||
| title: ARKit Scenes | ||
| python: https://github.com/rerun-io/rerun/blob/latest/examples/python/arkit_scenes/main.py | ||
| tags: [2D, 3D, depth, mesh, object-detection, pinhole-camera] | ||
| --- | ||
|
|
||
|  | ||
|
|
||
| Visualizes the [ARKit_Scenes dataset](https://github.com/apple/ARKitScenes/) using the Rerun SDK. | ||
| The dataset contains color+depth images, the reconstructed mesh and labeled bounding boxes around furniture. | ||
|
|
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
This file was deleted.
Oops, something went wrong.
This file was deleted.
Oops, something went wrong.
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
File renamed without changes.
File renamed without changes.
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
File renamed without changes.
File renamed without changes.
9 changes: 5 additions & 4 deletions
9
examples/python/dicom/README.md → examples/python/dicom_mri/README.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,13 +1,14 @@ | ||
| --- | ||
| title: Dicom | ||
| python: https://github.com/rerun-io/rerun/tree/latest/examples/python/dicom/main.py | ||
| title: Dicom MRI | ||
| python: https://github.com/rerun-io/rerun/tree/latest/examples/python/dicom_mri/main.py | ||
| tags: [tensor, mri, dicom] | ||
| --- | ||
|
|
||
|  | ||
|
|
||
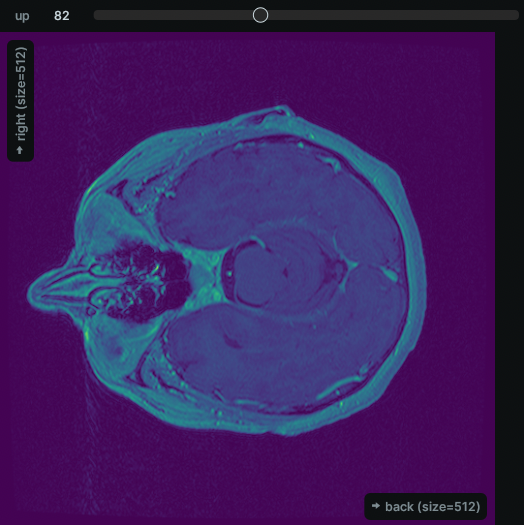
| Example using a [DICOM](https://en.wikipedia.org/wiki/DICOM) MRI scan. This demonstrates the flexible tensor slicing capabilities of the Rerun viewer. | ||
|
|
||
| ```bash | ||
| pip install -r examples/python/dicom/requirements.txt | ||
| python examples/python/dicom/main.py | ||
| pip install -r examples/python/dicom_mri/requirements.txt | ||
| python examples/python/dicom_mri/main.py | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
File renamed without changes.
9 changes: 5 additions & 4 deletions
9
examples/python/mp_pose/README.md → ...ples/python/human_pose_tracking/README.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,13 +1,14 @@ | ||
| --- | ||
| title: MP Pose | ||
| python: https://github.com/rerun-io/rerun/tree/latest/examples/python/mp_pose/main.py | ||
| title: Human Pose Tracking | ||
| python: https://github.com/rerun-io/rerun/tree/latest/examples/python/human_pose_tracking/main.py | ||
| tags: [mediapipe, keypoint-detection, 2D, 3D] | ||
| --- | ||
|
|
||
|  | ||
|
|
||
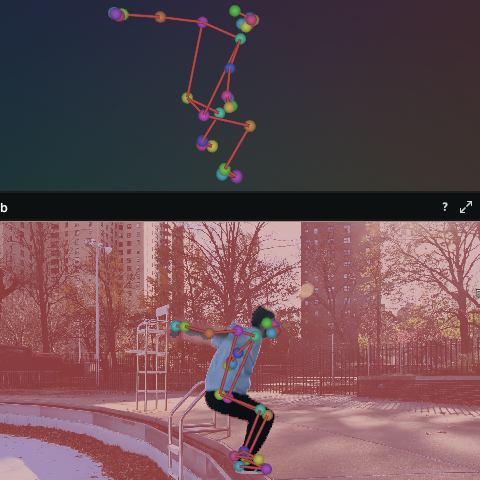
| Use the [MediaPipe](https://google.github.io/mediapipe/) Pose solution to detect and track a human pose in video. | ||
|
|
||
| ```bash | ||
| pip install -r examples/python/mp_pose/requirements.txt | ||
| python examples/python/mp_pose/main.py | ||
| pip install -r examples/python/human_pose_tracking/requirements.txt | ||
| python examples/python/human_pose_tracking/main.py | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,21 @@ | ||
| --- | ||
| title: Live Camera Edge Detection | ||
| python: https://github.com/rerun-io/rerun/blob/latest/examples/python/live_camera_edge_detection/main.py | ||
| tags: [2D, canny, live, opencv] | ||
| --- | ||
|
|
||
| Very simple example of capturing from a live camera. | ||
|
|
||
| Runs the opencv canny edge detector on the image stream. | ||
|
|
||
| NOTE: this example currently runs forever and will eventually exhaust your | ||
| system memory. It is advised you run an independent rerun viewer with a memory | ||
| limit: | ||
| ``` | ||
| rerun --memory-limit 4GB | ||
| ``` | ||
|
|
||
| And then connect using: | ||
| ``` | ||
| python examples/python/live_camera_edge_detection/main.py --connect | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,26 +1,26 @@ | ||
| -r api_demo/requirements.txt | ||
| -r arkitscenes/requirements.txt | ||
| -r arkit_scenes/requirements.txt | ||
| -r blueprint/requirements.txt | ||
| -r car/requirements.txt | ||
| -r clock/requirements.txt | ||
| -r colmap/requirements.txt | ||
| -r deep_sdf/requirements.txt | ||
| -r dicom/requirements.txt | ||
| -r depth_guided_stable_diffusion/requirements.txt | ||
| -r detect_and_track_objects/requirements.txt | ||
| -r dicom_mri/requirements.txt | ||
| -r dna/requirements.txt | ||
| -r face_tracking/requirements.txt | ||
| -r human_pose_tracking/requirements.txt | ||
| -r live_camera_edge_detection/requirements.txt | ||
| -r minimal/requirements.txt | ||
| -r minimal_options/requirements.txt | ||
| -r mp_pose/requirements.txt | ||
| -r multiprocessing/requirements.txt | ||
| -r multithreading/requirements.txt | ||
| -r notebook/requirements.txt | ||
| -r nyud/requirements.txt | ||
| -r objectron/requirements.txt | ||
| -r opencv_canny/requirements.txt | ||
| -r plots/requirements.txt | ||
| -r raw_mesh/requirements.txt | ||
| -r ros/requirements.txt | ||
| -r segment_anything/requirements.txt | ||
| -r stable_diffusion/requirements.txt | ||
| -r rgbd/requirements.txt | ||
| -r ros_node/requirements.txt | ||
| -r segment_anything_model/requirements.txt | ||
| -r signed_distance_fields/requirements.txt | ||
| -r structure_from_motion/requirements.txt | ||
| -r text_logging/requirements.txt | ||
| -r tracking_hf_opencv/requirements.txt |
File renamed without changes.
Oops, something went wrong.