Added Time based SMA to Filter Sensor #13104
There are no files selected for viewing
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -20,12 +20,14 @@ | |
| from homeassistant.util.decorator import Registry | ||
| from homeassistant.helpers.entity import Entity | ||
| from homeassistant.helpers.event import async_track_state_change | ||
| import homeassistant.util.dt as dt_util | ||
|
|
||
| _LOGGER = logging.getLogger(__name__) | ||
|
|
||
| FILTER_NAME_LOWPASS = 'lowpass' | ||
| FILTER_NAME_OUTLIER = 'outlier' | ||
| FILTER_NAME_THROTTLE = 'throttle' | ||
| FILTER_NAME_TIME_SMA = 'time_simple_moving_average' | ||
| FILTERS = Registry() | ||
|
|
||
| CONF_FILTERS = 'filters' | ||
|
|
@@ -34,6 +36,9 @@ | |
| CONF_FILTER_PRECISION = 'precision' | ||
| CONF_FILTER_RADIUS = 'radius' | ||
| CONF_FILTER_TIME_CONSTANT = 'time_constant' | ||
| CONF_TIME_SMA_TYPE = 'type' | ||
|
|
||
| TIME_SMA_LAST = 'last' | ||
|
|
||
| DEFAULT_WINDOW_SIZE = 1 | ||
| DEFAULT_PRECISION = 2 | ||
|
|
@@ -44,24 +49,37 @@ | |
| ICON = 'mdi:chart-line-variant' | ||
|
|
||
| FILTER_SCHEMA = vol.Schema({ | ||
| vol.Optional(CONF_FILTER_PRECISION, | ||
| default=DEFAULT_PRECISION): vol.Coerce(int), | ||
| }) | ||
|
|
||
| # pylint: disable=redefined-builtin | ||
| FILTER_OUTLIER_SCHEMA = FILTER_SCHEMA.extend({ | ||
| vol.Required(CONF_FILTER_NAME): FILTER_NAME_OUTLIER, | ||
| vol.Optional(CONF_FILTER_WINDOW_SIZE, | ||
| default=DEFAULT_WINDOW_SIZE): vol.Coerce(int), | ||
| vol.Optional(CONF_FILTER_RADIUS, | ||
| default=DEFAULT_FILTER_RADIUS): vol.Coerce(float), | ||
| }) | ||
|
|
||
| FILTER_LOWPASS_SCHEMA = FILTER_SCHEMA.extend({ | ||
| vol.Required(CONF_FILTER_NAME): FILTER_NAME_LOWPASS, | ||
| vol.Optional(CONF_FILTER_WINDOW_SIZE, | ||
| default=DEFAULT_WINDOW_SIZE): vol.Coerce(int), | ||
| vol.Optional(CONF_FILTER_TIME_CONSTANT, | ||
| default=DEFAULT_FILTER_TIME_CONSTANT): vol.Coerce(int), | ||
| }) | ||
|
|
||
| FILTER_TIME_SMA_SCHEMA = FILTER_SCHEMA.extend({ | ||
| vol.Required(CONF_FILTER_NAME): FILTER_NAME_TIME_SMA, | ||
| vol.Optional(CONF_TIME_SMA_TYPE, | ||
| default=TIME_SMA_LAST): vol.In( | ||
| [None, TIME_SMA_LAST]), | ||
|
|
||
| vol.Required(CONF_FILTER_WINDOW_SIZE): vol.All(cv.time_period, | ||
| cv.positive_timedelta) | ||
| }) | ||
|
|
||
| FILTER_THROTTLE_SCHEMA = FILTER_SCHEMA.extend({ | ||
| vol.Required(CONF_FILTER_NAME): FILTER_NAME_THROTTLE, | ||
| }) | ||
|
|
@@ -72,6 +90,7 @@ | |
| vol.Required(CONF_FILTERS): vol.All(cv.ensure_list, | ||
| [vol.Any(FILTER_OUTLIER_SCHEMA, | ||
| FILTER_LOWPASS_SCHEMA, | ||
| FILTER_TIME_SMA_SCHEMA, | ||
| FILTER_THROTTLE_SCHEMA)]) | ||
| }) | ||
|
|
||
|
|
@@ -277,6 +296,49 @@ def _filter_state(self, new_state): | |
| return filtered | ||
|
|
||
|
|
||
| @FILTERS.register(FILTER_NAME_TIME_SMA) | ||
| class TimeSMAFilter(Filter): | ||
| """Simple Moving Average (SMA) Filter. | ||
|
|
||
| The window_size is determined by time, and SMA is time weighted. | ||
|
|
||
| Args: | ||
| variant (enum): type of argorithm used to connect discrete values | ||
| """ | ||
|
|
||
| def __init__(self, window_size, precision, entity, type): | ||
| """Initialize Filter.""" | ||
| super().__init__(FILTER_NAME_TIME_SMA, 0, precision, entity) | ||
| self._time_window = int(window_size.total_seconds()) | ||
| self.last_leak = None | ||
| self.queue = deque() | ||
|
|
||
| def _leak(self, now): | ||
| """Remove timeouted elements.""" | ||
| while self.queue: | ||
| timestamp, _ = self.queue[0] | ||
| if timestamp + self._time_window <= now: | ||
| self.last_leak = self.queue.popleft() | ||
|
Member
There was a problem hiding this comment. Is there any reason this is assigned to an instance variable instead of a local variable and returned at the end of the while loop ?
Contributor
Author
There was a problem hiding this comment. Please look at the previous comment #13104 (comment) Keeping this value assures me I always have some value to work with in the _filter_state() The filter always lags 1 state behind, so using the new state in these cases (when there are no previous states in the windows) would make the behaviour erratic. |
||
| else: | ||
| return | ||
|
|
||
| def _filter_state(self, new_state): | ||
| now = int(dt_util.utcnow().timestamp()) | ||
|
|
||
| self._leak(now) | ||
| self.queue.append((now, float(new_state))) | ||
| moving_sum = 0 | ||
| start = now - self._time_window | ||
| _, prev_val = self.last_leak or (0, float(new_state)) | ||
|
|
||
| for timestamp, val in self.queue: | ||
| moving_sum += (timestamp-start)*prev_val | ||
|
Member
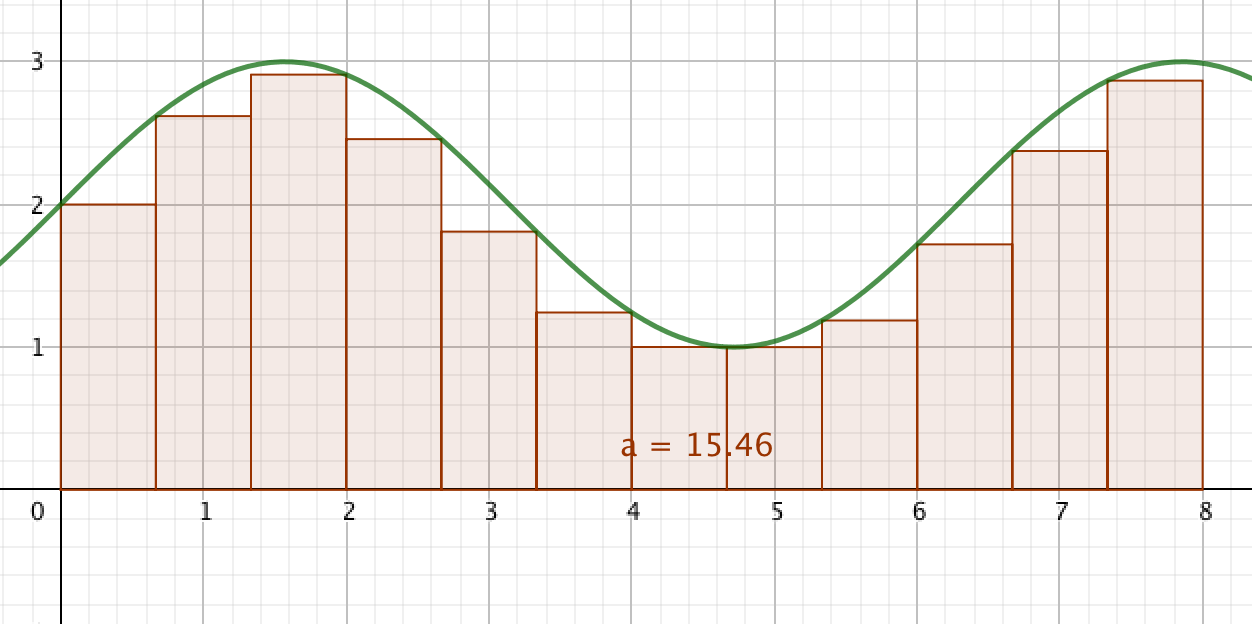
There was a problem hiding this comment. What you're doing here is a lower bound of the moving average:
(Edit: This picture is not entirely true; Your code always takes the previous values for the "integral" approximation, not the lower of the two) Ideally we would instead be using the mean of
Contributor
Author
There was a problem hiding this comment. I based the implementation in this paper: http://www.eckner.com/papers/Algorithms%20for%20Unevenly%20Spaced%20Time%20Series.pdf My implementation is that of SMA_last, what you propose is SMA_linear. Both are acceptable filters, yet different ones.
Member
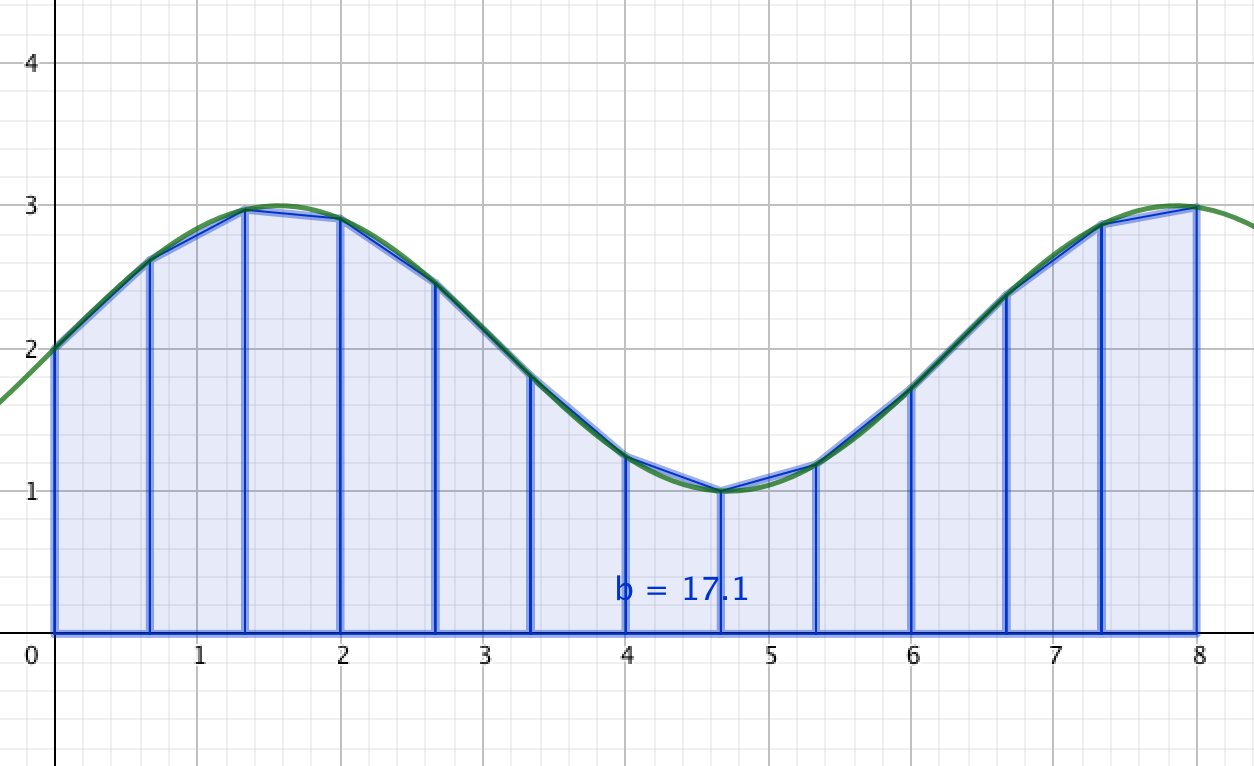
There was a problem hiding this comment. Ok that is true; I don't see much value in this SMA_last method over the trapezoids though. The latter just seems quite a bit more accurate in most cases.
Contributor
Author
There was a problem hiding this comment. I will probably PR a second filter based on SMA_linear, but the use cases are different: SMA_last: "discrete observation values"
SMA_linear: "discretely-observed continuous-time stochastic processes"
|
||
| start, prev_val = timestamp, val | ||
| moving_sum += (now-start)*prev_val | ||
|
|
||
| return moving_sum/self._time_window | ||
|
Member
There was a problem hiding this comment. What if we don't receive any value within I know this might be a bit of work to do but it's what I'd expect as a user. See usages of
Contributor
Author
There was a problem hiding this comment. I disagree, If I don't get any values it just means that it hasn't changed.
Member
There was a problem hiding this comment. The problem here is that the time has changed and time is also an input into this filter. Imagine that our current value is based off 2 states that happened during the window. If we wait long enough that 1 state drops out of our window, wouldn't you expect to base the value off just the other state?
Contributor
Author
There was a problem hiding this comment. @balloob that is exactly what it will happen. Even if no points are left in the time window, the filter will report based on the last value that exited the windows (_, prev_val = self.last_leak )
Member
There was a problem hiding this comment. @dgomes I think you're misunderstanding Paulus' comment (or I'm not understanding it...) If there's only one point within the time window, as a user I wouldn't expect it to use the last value outside the time window for any computation. It should just discard anything that's outside the time window. In other words: only every consider the data points that are inside the time frame for computation. See this gif for an example (the blue points are the data points, the blue area is our time window and red line is the output):
Couple of things going on here:
(The computation of the values while both data points are inside the time window is probably not right in my gif, but that's not the focus of this comment.)
Contributor
Author
There was a problem hiding this comment. @OttoWinter that is not the filter I'm implementing here. Sure, that filter can be implemented, but it's not the one in this PR. Please share how you are creating those graphs 😄
Member
There was a problem hiding this comment. @dgomes I see that you report only on the last value but you only update the filter value when a new state comes in right?
Member
There was a problem hiding this comment. @dgomes Ok, sorry I will shut up about other filters 😅 Yeah those graphics were done with (ab)using GeoGebra, but I would describe it as the single most user-unfriendly maths tools ever written IMHO (but it's sadly what's taught here in Austria 🇦🇹). Seriously, it's incredibly hard to use if you're starting out. (incidentally, because of its poor usability the rest of my class will probably also have to re-take a recent maths exam 😥) btw, if for some reason you're looking for a nice tool (in python, yay) for creating nice presentations, have a look at manim. For example, it has allowed me to create these fancy visualizations about graph theory: https://youtu.be/t2Gb1YA-HcU 😺
Contributor
Author
There was a problem hiding this comment. @balloob right, this filter always lags 1 state behind. The concept is that the raw sensor has maintained the previous status until the new state has arrived. E.g.: Think about a water pump that publishes its rate (1 to 5). If the pump is at speed 5 and comes down to speed 4 (new state) the SMA is calculated with the period of time in which the pump was at 5 (we weight in the time the pump was at 5), 4 is of no use in the SMA since the period of time is 0 (it just got to 4). @OttoWinter please contribute more filters :) It's just that I'm prioritising filters I can use in my setup. There are plenty of important filters missing which I hope some else can contribute 😄
Member
There was a problem hiding this comment. Okay I'm going to shut up talking about filters as I have clearly not a clue what I am talking about 👍 |
||
|
|
||
|
|
||
| @FILTERS.register(FILTER_NAME_THROTTLE) | ||
| class ThrottleFilter(Filter): | ||
| """Throttle Filter. | ||
|
|
||
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Why is
Nonerequired here? I mean we have a default. The only configuration that I believe would spit outNonehere would be the following:And I think we should break when the user writes that.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Oops, Otto is right.
Uh oh!
There was an error while loading. Please reload this page.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
You are absolutely right! Just created a new PR #13326