"Simple, yet increadbly useful."
Thanks for 

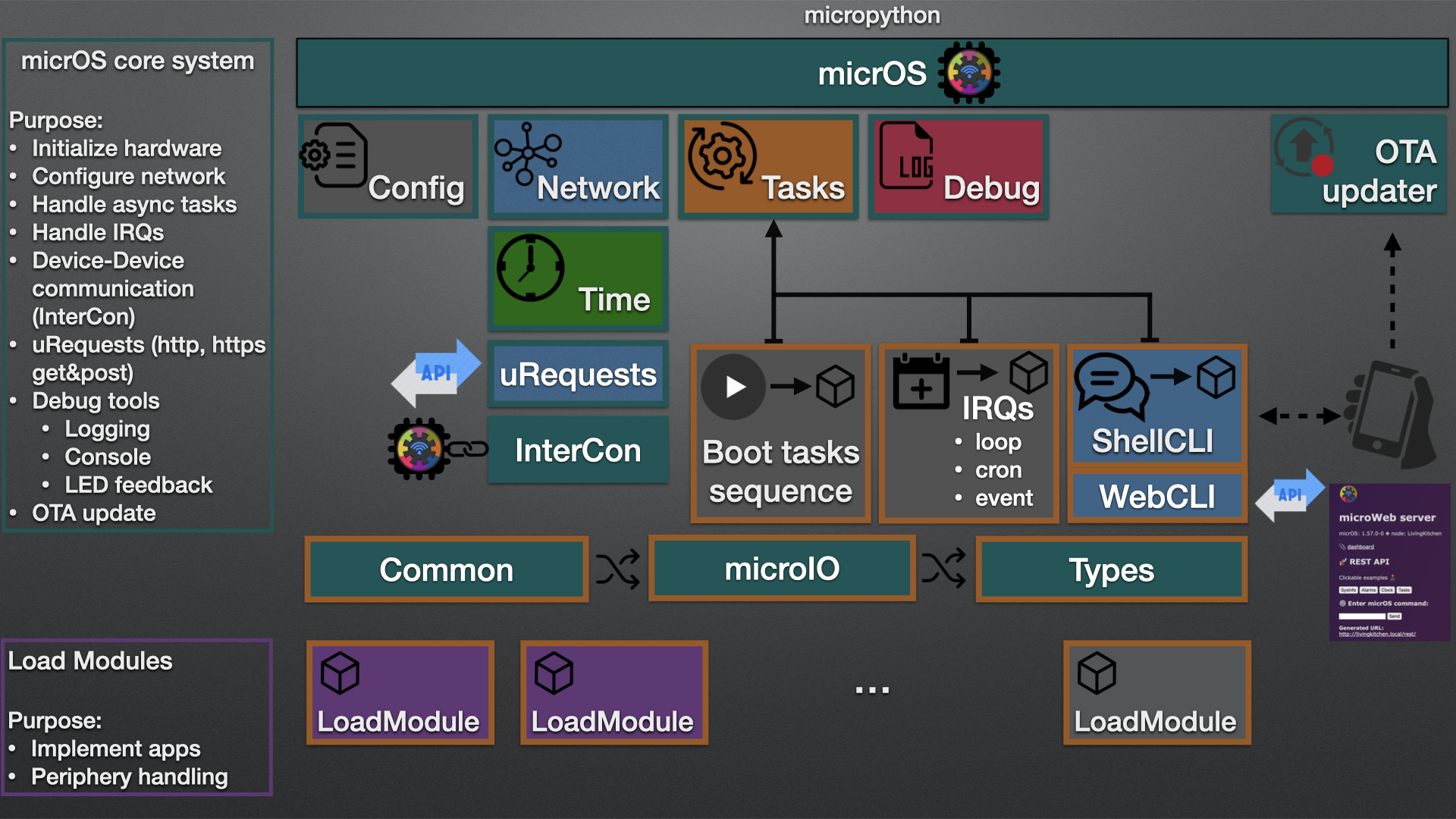
micrOS is a micropython based mini application execution platform with ShellCli (socket) and WebCli (http) servers and several other embedded features.
It uses direct wifi connection to access the exposed functionalities.
In case of any technical comments or requests, please use .


Example shortcut (usage of the API): link
Access rest api over browser: http://<nodename>.local
📲 💻 ShellCli: Generic session-based communication API
📲 WebCli: Apple shortcuts compatible REST API and http homepage
✉️ Expose upython module functions - telnet TCP/IP and REST API
⚙️ 📝 Device initialization from user config
🧩 Codeless end user experience via phone client
🛠 Easy to create custom application(s) aka create your own Load Modules:
🦾 Built-in scheduling (IRQs):
- Time stamp based
- Geolocation based clock setup + time tags: sunset, sunrise
- Simple periodic
🔄 Async task manager - start (&/&&) / list / kill / show
🚀🎈Lightweight and high performance core system that leaves you space 😎
- micrOS Client Application link
- micrOS Installer link
- micrOS Tutorials link
- micrOS System and features link
- Pin mapping - GPIO link
- micrOS Node configuration link
- micrOS create custom Load Modules: link
- micrOS Gateway server with Prometheus&Grafana: link
- Release notes: link


macOS / Windows / Linux to install any esp32 board

End-to-End solution for deployment, update, monitor and develop micrOS boards.
I would suggest to use micrOS GUI as a primary interface for micrOS development kit, but you can use cli as well if you prefer.
Note: The main purpose of the USB deployment scripts to install micropython on the board and put all micrOS resources from
micrOs/toolkit/workspace/precompiledto the connected board.
Link for python 3.9+ download
Note: Allow extend system path with that python version (installation parameter)
On Windows: RUN AS ADMINISTARTOR
Open command line on mac, press: commnd+space + type: terminal + press: enter
pip3 install --upgrade pip; pip3 install micrOSDevToolKitLater on you can update the package with
pip3 install --upgrade micrOSDevToolKitOpen Windows PowerShell, press windows+R + type: powershell + press enter
Copy the following lines to the PowerShell and press enter.
python -m pip install --upgrade pip
python -m pip install micrOSDevToolKitLater on you can update the package with
python -m pip install --upgrade micrOSDevToolKitCopy the following command to the command line and press enter to start.
devToolKit.py
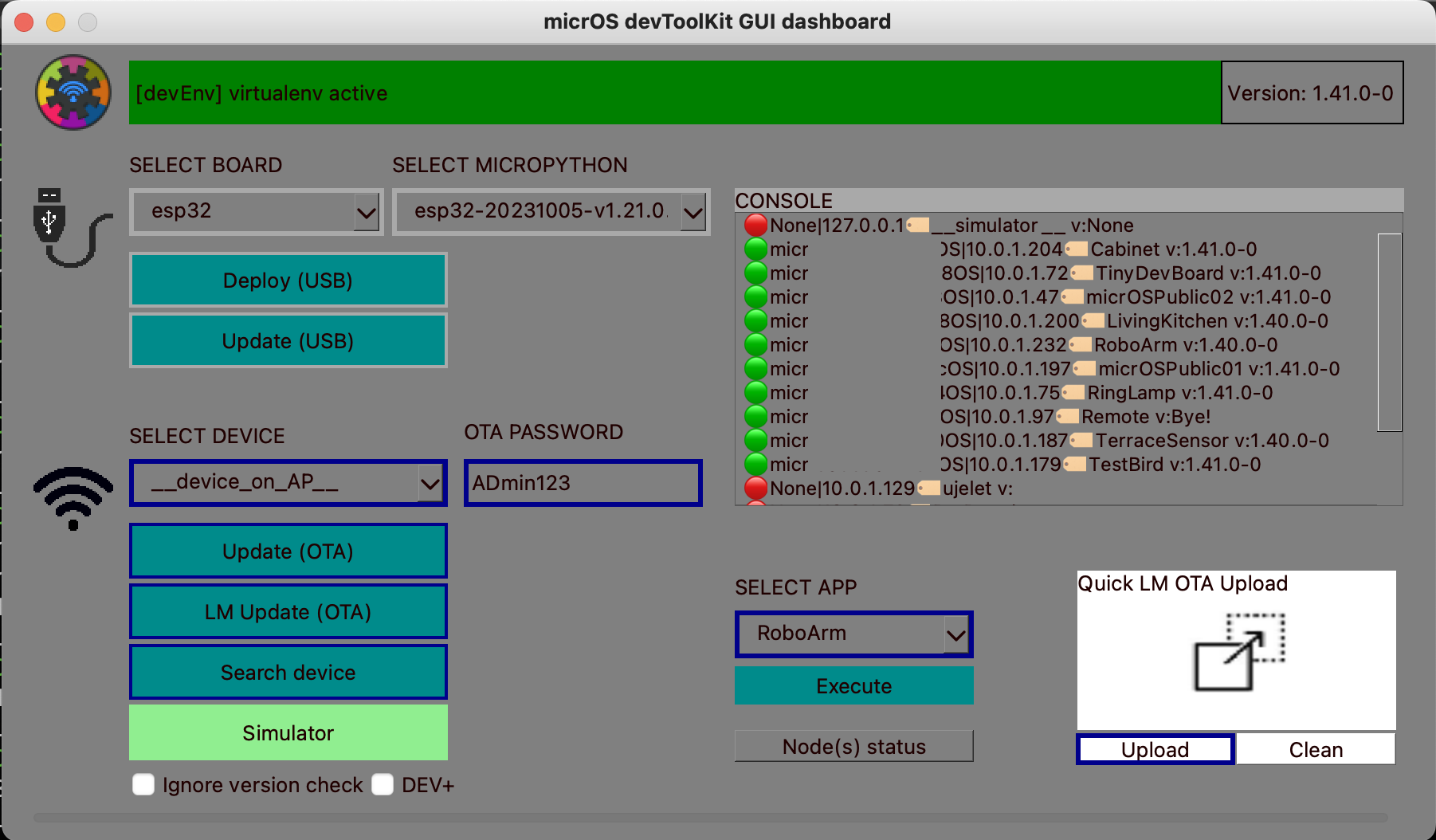
It will open a graphical user interface for micrOS device management, like usb deploy, update, OTA operations, test executions, etc...
- Example
1. Select BOARD TYPE
2. Click on [Deploy (USB)] button -> presss YES
It will install your board via USB with default settings. Continue with micrOS Client app...
Note: At the first USB deployment, devToolKit will ask to install SerialUSB driver and it will open the driver installer as well, please follow the steps and install the necessary driver.
╔╗ ╔╗ ╔═══╗╔╗ ╔╗╔═╗ ╔╗ ╔═══╗
║║ ║║ ║╔══╝║║ ║║║║╚╗║║ ╚╗╔╗║
║╚═╝║╔══╗ ╔╗╔╗╔══╗ ║╚══╗║║ ║║║╔╗╚╝║ ╔═╗ ║║║║
║╔═╗║╚ ╗║ ║╚╝║║╔╗║ ║╔══╝║║ ║║║║╚╗║║ ╚═╝ ║║║║
║║ ║║║╚╝╚╗╚╗╔╝║║═╣ ╔╝╚╗ ║╚═╝║║║ ║║║ ╔═╗╔╝╚╝║
╚╝ ╚╝╚═══╝ ╚╝ ╚══╝ ╚══╝ ╚═══╝╚╝ ╚═╝ ╚═╝╚═══╝




Note: micrOS development kit contains command line interface for socket communication. Example:
devToolKit.py --connect
-
🕯micrOS loader - starts micrOS or WEBREPL(update / recovery modes)
- OTA update - push update over wifi (webrepl automation) / monitor update and auto restart node
-
📄Config handling - user config - node_config.json
- ⏳Boot phase - preload Load Module(s)
- For pinout and last state initialization - based on node_config
boothook - Example values:
rgb load; neopixel load - Comments
#can be used:#rgb load; neopixel load, excellect for experimentation.
- For pinout and last state initialization - based on node_config
- 📡Network handling - based on node_config
- STA / AP network modes,
nwmd - NTP + UTC aka clock setup
- API: ip-api.com
- Static IP configuration,
devip - dhcp hostname setup,
devfid.local - system
uptimemeasurement
- STA / AP network modes,
- ⚙️Scheduling / External events - Interrupt callback - based on node_config
- Time based
- ⌛️simple LM task pool execution
timirq&timirqcbfTimer(0)- Comments
#can be used intimirqcbf
- 🗓cron [time stump!LM task] pool execution
cron&crontasks-
Timer(1) -
timestamp:
WD:H:M:S!LM FUNC, ranges:0-6:0-23:0-59:0-59!LM FUNC- example:
*:8:0:0!rgb rgb r=10 g=60 b=100; etc., it will set rgb color on analog rgb periphery at 8am every day. WD: 0...60=Monday, 6=Sunday- optional range handling: 0-2 means Monday to Wednesday
- example:
-
tag:
sunset/sunrise- example:
sunset!rgb rgb r=10 g=60 b=100; etc., it will set rgb color on analog rgb periphery at every sunset, every day. - optional minute offset (+/-): sunrise+30
- example:
-
Comments cannot be used in
crontasks! No multiple commands in this mode!
-
- ⌛️simple LM task pool execution
- 💣Event based
- Set trigger event
irqX- Trigger up/down/both
irqX_trig - With LM callback function
irqX_cbf - Comments
#can be used inirqX_cbf
- Trigger up/down/both
Xcan be = 1, 2, 3 or 4
- Set trigger event
- Time based
- ⏳Boot phase - preload Load Module(s)
-
⚙️**[L]oad [M]odule** aka application execution
- Lot of built-in functions (table below)
- Create your own module with 3 easy steps
- Create a python file, naming convention:
LM_<your_app_name>.py- Replace
<your_app_name>for anything you prefer!
- Replace
- Write python functions, you can call any function from that module...
- Upload modul with "drag&Drop" devToolKit GUI
devToolKit.py
- Create a python file, naming convention:
-
📨ShellCli - wireless communication interface with the nodes
- System commands:
help, version, reboot, modules, webrepl, webrepl --update, etc.- After
webrepl --updatecommand the micrOS system reboots and waits for ota update in webrepl mode about 20 seconds.
- After
- Config handling SET/GET/DUMP - node_config.json
- enter configuration mode:
conf - Print out all parameters and values:
dump - exit configuration mode:
noconf
- enter configuration mode:
- LM - Load Module function execution (application modules)
- Example:
system info
- Example:
- System commands:
-
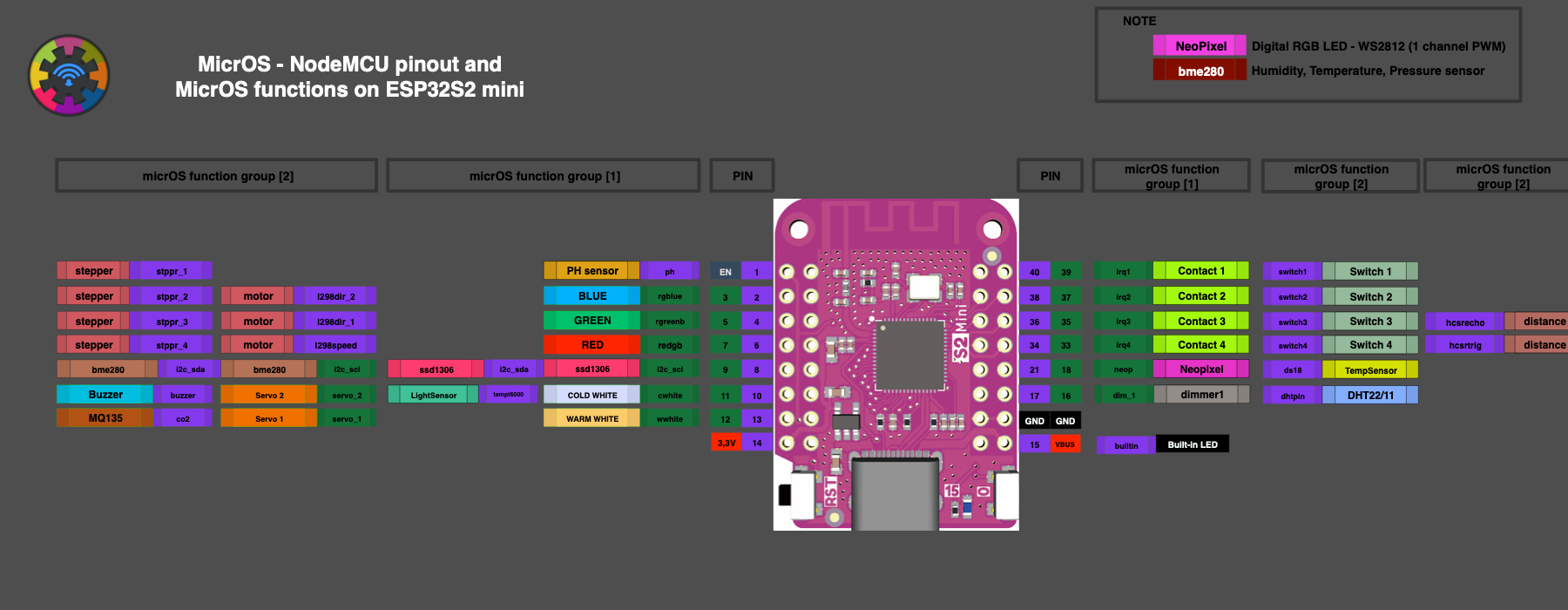
🖇microIO pinout handling - lookuptables for each board
- Predefined pinout modules for esp32, tinyPico
- Create your pinout based on
IO_esp32.py, naming convencion:IO_<name>.py - To activate your custom pinout set
cstmpmapconfig parameter to<name> - HINT: to get pin number you can get it by pin label, like:
system pinamp
-
🔄 Task manager aka Async LM jobs
- Capable of execute [L]oad [M]odules in the background
- Invoke with single execution
&or for loop execution&& - Example:
- In loop:
system heartbeat &&- Loop frequency conrol:
system heartbeat &&1000, it will execute every sec
- Loop frequency conrol:
- Single call:
system heartbeat &- Delayed execution (ms):
system heartbeat &1000, waits 1 sec before execution.
- Delayed execution (ms):
- In loop:
- Stop task:
task kill system.heartbeat - Show task live ouput:
task show system.heartbeat
⌘ DevToolKit CLI feature:
- Socket client python plugin - interactive - non interactive mode
There are multiple types of MCU-s (esp32, esp32s3, etc.) available to order, BUT to be able to enable more features (~2 Load Modules) and full capable WebUI interface you need to have more then 190-210kb of ram (basic boards)(ℹ️).
There is a solution ✅, additinal psram: ~2-4-8Mb boards are available. It used to name as psram or spiram, even there is a type octo-psram, so check it before buy!!! Psram needs to be supported on micropython side as well !!!
Suggestions - 🔮futureproof hardware:
esp32s3: Very fast new espressif module that supports psram detection, so you can freely select any module with this MCU with additinal ram, and micros will work with the best performance, typical ram sizes: 2Mb (more then enough for everage usage), 4-8Mb (capacble of image and sound processing tasks and load all GPIO-s 🚀)
esp32s3-octo Same sa normal psram, just uses 8 pins to connect to the MCU, basically faster...
tinypico excellet hardware, bit pricy, with 4Mb of ram.
esp32cam it has a custom image and attached 8Mb of ram.
So prefer boards with more psram 2Mb-8Mb, minumum requirement for the full flatched setup ~400kb but smallest psram is 2Mb, in practive:
- max measured 4Mb is 3.2% 128kb - oled_ui and lot of things loaded...
- camera stream can use about 50% of ram, that means about 2Mb of ram usage.
ℹ️ With basic 190-210kb of ram you can use the system with ShellCli with no issue, just webUI dashboard cannot be load due to memory limitations..., under 140kb of system ram the system not reliable, so these boards are not supported.
Note:
esp32 also can be totally fine with ShellCli, WebCli and 1 load module or multiple modules based on module size... just can be limited by the available memory soonor the later ... (WebCli javascript, htmls are quite small but can be few tens of kilobytes, also multiple async tasks in the background can take same, and roughly around 80% of memory usage system can be instable and restarts.) So if you have a spare one try out micrOS with a range of features :)
#Sensors / inputes #Actuators / outputs

[CLICK] Show micrOS Load Module functions
LogicalPin lookup tables:
- tinypico
- esp32
- esp32s2
- esp32s3
- raspberryPicoW - reset needed after ota update (webrepl limitation)
IO_*.pyetc.
Note: Good idea to use costant variable for pin map declaration, check the files for more info, These files are also precompiled automatically into byte steams ->
.mpy

GENERAL CONTROLLER CONCEPT: microPLC
{kind=link}


These parameters controlls micrOS core functionalities, so you can define an entire system by setting your custom configurations via these values.
| Config keys | Default value and type | Reboot required | Description |
|---|---|---|---|
devfid |
node01 <str> |
Yes | Device friendly "unique" ID - (1) defines AccessPoint (AP) network name and (2) in Station (STA) network mode the DHCP device name for IP address resolve also (3) this is the ShellCli prompt. |
staessid |
your_wifi_name <str> |
Yes | Wifi router name to connect (for STA default connection mode). You can list multiple wifi names separated with ; |
stapwd |
your_wifi_passwd <str> |
Yes | Wifi router password (for STA default connection mode). You can list multiple wifi passwords separated with ; connected in order to staessid wifi names. |
appwd |
ADmin123 <str> |
Yes | Device system password.: Used in AP password (access point mode) + webrepl password + micrOS auth |
boothook |
n/a <str> |
Yes | Add Load Module execution(s) to the boot sequence. Separator ;. Examples: rgb load; cct load but you can call any load module function here if you want to run it at boot time. |
webui |
False bool |
Yes | Launch http rest server on port 80 (in parallel with micrOS shell on port 9008 aka socport). It has 2 endpoints: / aka main page (index.html) and /rest aka rest (json) interface for load module execution. Example: <devfid>.local or <devfid>.local/rest + optional parameters: /rgb/toggle. Apple shortcuts compatible |
cron |
False <bool> |
Yes | Enable timestamp based Load Module execution aka Cron scheduler (linux terminology), Timer(1) hardware interrupt enabler. |
crontasks |
n/a <str> |
Yes | Cron scheduler input, task format: WD:H:M:S!module function e.g.: 1:8:0:0!system heartbeat, task separator in case of multiple tasks: ;. [WD:0-6, H:0-23, M:0-59, S:0-59] in case of each use: *. Instead WD:H:M:S you can use suntime tags: sunset, sunrise, optional offset: sunset+-<minutes>, sunrise+-<minutes>, example: sunset-30!system heartbeat. Range of days: WD can be conrete day number or range like: 0-2 means Monday to Wednesday. |
irq1 |
False <bool> |
Yes | External event interrupt enabler - Triggers when desired signal state detected - button press happens / motion detection / etc. |
irq1_cbf |
n/a <str> |
Yes | irq1 enabled, calls the given Load Modules, e.x.: module function optional_parameter(s) when external trigger happens. |
irq1_trig |
n/a <str> |
Yes | Sets trigger mode for external irq, signal phase detection, values up (default: n/a) or down or both. |
irq2 |
False <bool> |
Yes | External event interrupt enabler - Triggers when desired signal state detected - button press happens / motion detection / etc. |
irq2_cbf |
n/a <str> |
Yes | irq2 enabled, calls the given Load Modules, e.x.: module function optional_parameter(s) when external trigger happens. |
irq2_trig |
n/a <str> |
Yes | Sets trigger mode for external irq, signal phase detection, values up (default: n/a) or down or both. |
irq3 |
False <bool> |
Yes | External event interrupt enabler - Triggers when desired signal state detected - button press happens / motion detection / etc. |
irq3_cbf |
n/a <str> |
Yes | irq3 enabled, calls the given Load Modules, e.x.: module function optional_parameter(s) when external trigger happens. |
irq3_trig |
n/a <str> |
Yes | Sets trigger mode for external irq, signal phase detection, values up (default: n/a) or down or both. |
irq4 |
False <bool> |
Yes | External event interrupt enabler - Triggers when desired signal state detected - button press happens / motion detection / etc. |
irq4_cbf |
n/a <str> |
Yes | irq4 enabled, calls the given Load Modules, e.x.: module function optional_parameter(s) when external trigger happens. |
irq4_trig |
n/a <str> |
Yes | Sets trigger mode for external irq, signal phase detection, values up (default: n/a) or down or both. |
irq_prell_ms |
300 <int> |
Yes | "Prell": contact recurrence (hw property), for fake event filtering... :D Time window to ignore external IRQ events in ms. |
timirq |
False <bool> |
Yes | Timer(0) interrupt enabler - background "subprocess" like execution, timer based infinite loop for the LoadModule execution. |
timirqcbf |
n/a <str> |
Yes | if timirq enabled, calls the given Load Module(s), e.x.: module function optional_parameter(s), task separator: ; |
timirqseq |
1000 <int> |
Yes | Timer interrupt period in ms, default: 3000 ms (for timirq infinite loop timer value) |
telegram |
n/a str |
No | TELEGRAM_BOT_TOKEN to enable micrOS Notifications. Hint, to create bot with botfather: click. After enabling this, send /ping to telegram chat for chat ID sync. |
| Config keys | Default value and type | Reboot required | Description |
|---|---|---|---|
utc |
60 <int> |
Yes | NTP-RTC - timezone setup (UTC in minute) - it is automatically calibrated in STA mode based on geolocation. |
cstmpmap |
n/a <str> |
Yes | Default (n/a), select pinmap automatically based on platform (IO_<platform>). Manual control / customization of application pins, syntax: pin_map_name; pin_name:pin_number; etc. [1][optional] pin_map_name represented as IO_<pin_map_name>.py/.mpy file on device. [2+][optinal] dht:22 overwrite individual existing load module pin(s). Hint: <module> pinmap() to get app pins, example: neopixel pinmap() |
boostmd |
True <bool> |
Yes | boost mode - set up cpu frequency low or high 16Mhz-24MHz (depends on the board). |
aioqueue |
3 <int> |
Yes | System async queue controller (resource limiter).: #1 Set asyc task queue limit (for soft tasks: &). Furthermore #2 Socker server-s (webCli, ShellCli) client number limiter. 3 means: 3 cooperative connection (queue) shared by webCli and shellCli. It can be increased based on available resources. |
devip |
n/a <str> |
Yes(N/A) | Device IP address, (first stored IP in STA mode will be the device static IP on the network), you can set specific static IP address here. |
nwmd |
n/a <str> |
Yes | Prefered network mode - AP or STA, default is STA. |
soctout |
30 <int> |
Yes | Socket server connection timeout. If user is passive for soctout sec, and new connection incoming, then close passive connection. So it is time limit per connection in the aioqueue. |
socport |
9008 <int> |
Yes | Socket server service port (should not be changed due to client and API inconpatibility). |
auth |
False <bool> |
Yes | Enables socket password authentication, password: appwd. Passwordless functions: hello, version, exit. WARNING OTA upade not supported in this mode (yet). |
dbg |
True <bool> |
Yes | Debug mode - enable micrOS system printout, server info, etc. + progress LED. |
hwuid |
n/a <str> |
N/A | USED BY SYSTEM (state storage) - hardware address - dev uid |
guimeta |
n/a str |
No | USED BY micrOS Client (state storage) - stores - offloaded parameter type in config. Clinet widget meta data storage. |
Note: Default empty value:
n/ain case of string parameter. Note: Cron is only available on devices with Timer(1): esp32

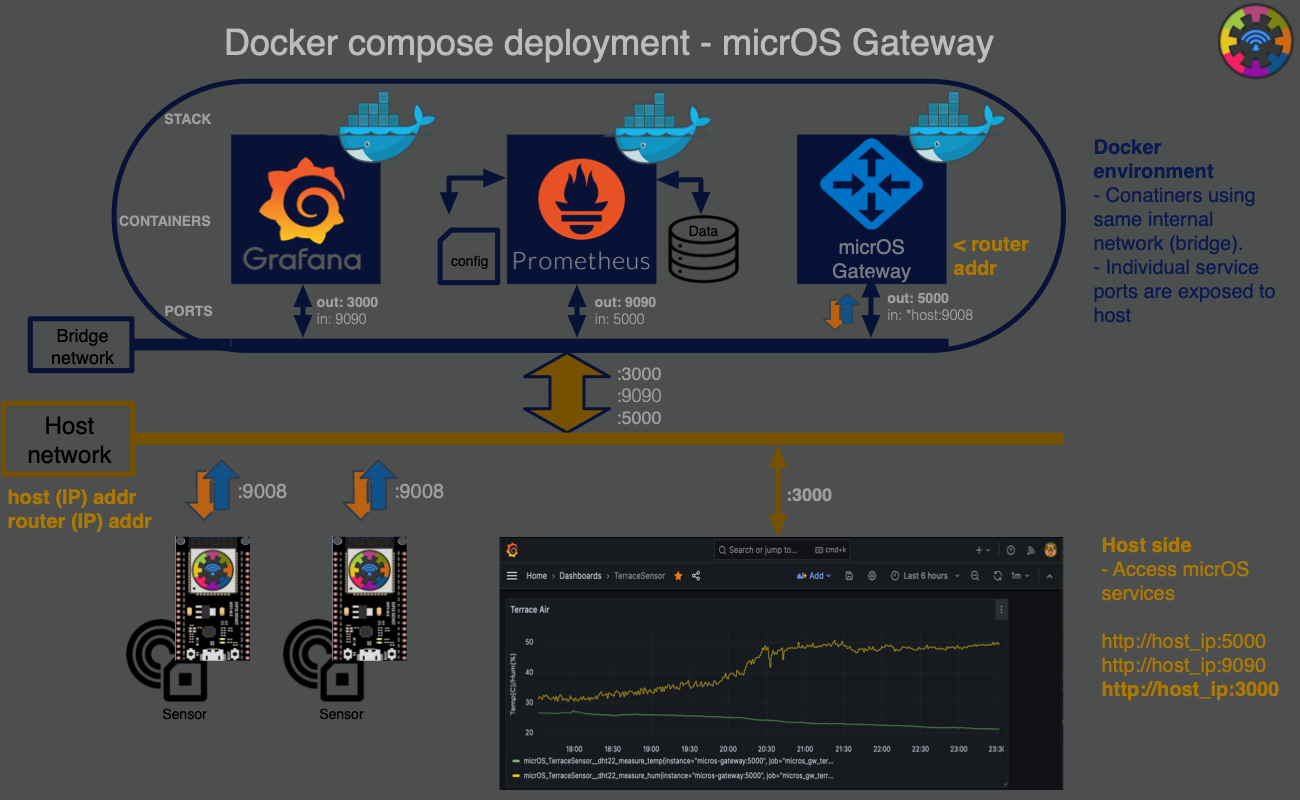
With prometheus database. Check the micrOS Gateway docker README for details.
Resources:
modify
prometheus.ymlregarding what sensors on which endpoint do you want to scrapre data from.
cd ./env/docker
docker-compose -p gateway up -dOfficial DockerHub

Version 3.0.0-0
Core:
- Async SSL/TLS integration (micropython 1.22+ required)
- urequest module async redesign for rest clients
- Notify (telegram) + server (listener - chatbot)
- Time (ntp location + sunset/sunrise api)
Version 3.1.0-0
Core:
- Async socket SSL/TLS integration (with auth.)
- WebCli (http), ShellCli (terminal) and InterCon
- Study of ESP-NOW (peer-to-peer communication) integration into InterCon (micropython requirements?)
Version 4.0.0-0
Core:
- Network stack redesign
- Network
- wifi (defualt, current interfaces)
- Study of BLE (Shell)
- Low power mode (with BLE) and soft-sleep / deep-sleep
| VERSION (TAG) | RELEASE INFO | MICROS CORE MEMORY USAGE | SUPPORTED DEVICE(S) | APP PROFILES | Load Modules | NOTE |
|---|---|---|---|---|---|---|
| v0.1.0-0 | release_Info-0.1.0-0 | 78,4% 29 776 byte | esp8266 | App Profiles | LM manual | Stable Core with applications - first release |
| v0.4.0-0 | release_Info-0.4.0-0 | 81,0% 30768 byte | esp8266 | App Profiles | LM manual | micrOS multi device support with finalized core and so more. OTA update feature. |
| v0.4.0-0 | release_Info-0.4.0-0 | 47,1% 52 416 byte | esp32 | App Profiles | LM manual | micrOS multi device support with finalized core and advanced task scheduler based on time, and and so more. OTA update feature. |
| v1.0.0-0 | release_Info-1.0.0-0 | 47,9% 53 280 byte | esp32 | App Profiles | LM manual | Release of v1 micrOS, timer and event based irqs, cron task scheduling, realtime communication, multiple device support. OTA, etc. |
| v1.2.2-0 | release_Info-1.2.2-0 | 48,6% 54 032 byte | esp32 | App Profiles | LM manual | Public Release of v1 micrOS, timer and event based irqs, cron task scheduling, realtime communication, multiple device support. OTA update, thread from socket shell (beta) etc. |
| v light-1.3.0-0 | - | - | esp8266 | lightweight branch | - | remove esp8266 due to memory limitation - BUT still supported with limited functionalities on lightweight branch. Hint: Change branch on github and download zip file, then start micrOSDevToolKit dashboard GUI |
| v 1.5.0-1 | release_Info-1.5.0-1 | 58,2% 64 704 byte | esp32 (tinyPico) | App Profiles | LM manual | Advanced Timer IRQ based scheduling (cron & timirq), Geolocation based timing features, External IRQs with 4 channel (event filtering), finalized light controls, Device-Device comminucation support, etc. |
| v 1.21.0-4 | release_Info-1.21.0-4 | 57.3% 63 728 byte | esp32 (tinyPico, esp32s2, esp32s3) | App Profiles | LM manual | Full async core system with advanced task management and device to device communication, task scheduling and much more ... with more then 30 application/pheriphery support. |
| v 2.0.0-0 | release_Info-2.0.0-0 | 45.4% 68.7 kb | esp32 (tinyPico, esp32s2, esp32s3) | App Profiles | LM manual | Optimizations, WebCli with web frontends, Camera support. Micropython 1.21 async maxed out :D |
| v 2.6.0-0 | release_Info-2.6.0-0 | 48.3% 72.6 kb | esp32 (tinyPico, esp32s2, esp32s3) | App Profiles | LM manual | WebCli http server enhancements. New webapps: dashboard. Core system official interface finalization towards Load Modules: Common.py, Types.py (frontend generation), microIO.py (pinout handling). |
Note:
Secure Core (OTA static modules) (GUI):
boot.py,micrOSloader.mpy,Network.mpy,ConfigHandler.mpy,Debug.mpy
Go to micrOS repo, where the devToolKit.py located.
devToolKit.py --makeNote: Follow the steps :)
Search and Connect to the device
devToolKit.py -s -c
User commands
devToolKit.py -h
optional arguments:
-h, --help show this help message and exit
Base commands:
-m, --make Erase & Deploy & Precompile (micrOS) & Install (micrOS)
-r, --update Update/redeploy connected (usb) micrOS. - node config will be restored
-s, --search_devices Search devices on connected wifi network.
-o, --OTA OTA (OverTheArir update with webrepl)
-c, --connect Connect via socketclinet
-p CONNECT_PARAMETERS, --connect_parameters CONNECT_PARAMETERS
Parameters for connection in non-interactivve mode.
-a APPLICATIONS, --applications APPLICATIONS
List/Execute frontend applications. [list]
-stat, --node_status Show all available micrOS devices status data.
-cl, --clean Clean user connection data: device_conn_cache.json
Search devices
devToolKit.py --search_devices
or
devToolKit.py -s
List discovered devices with status updates
devToolKit.py -stat
or
devToolKit.py --node_status
Output:
[ UID ] [ FUID ] [ IP ] [ STATUS ] [ VERSION ] [COMM SEC]
__localhost__ __simulator__ 127.0.0.1 OFFLINE <n/a> n/a
micr<ID>OS TinyDevBoard 10.0.1.72 ONLINE 1.16.2-2 0.072
micr<ID>OS LivingKitchen 10.0.1.200 ONLINE 1.16.2-2 0.076
micr<ID>OS RoboArm 10.0.1.232 ONLINE 1.15.4-0 0.072
micr<ID>S Cabinet 10.0.1.204 ONLINE 1.16.2-2 0.074
micr<ID>4OS TestBird 10.0.1.179 ONLINE 1.16.2-1 0.083
micr<ID>OS RingLamp 10.0.1.75 ONLINE 1.16.2-2 0.099
micr<ID>OS CatFeeder 10.0.1.111 OFFLINE <n/a> n/a
micr<ID>OS ImpiGamePro 10.0.1.23 OFFLINE <n/a> n/a
micr<ID>S micrOSPublic02 10.0.1.47 ONLINE 1.16.2-2 0.101
micr<ID>cOS micrOSPublic01 10.0.1.197 ONLINE 1.16.2-2 0.099
micr<ID>cOS experipurple 10.0.1.94 OFFLINE <n/a> n/a
Other Developer commands
Development & Deployment & Connection:
-f, --force_update Force mode for -r/--update and -o/--OTA
-e, --erase Erase device
-d, --deploy Deploy micropython
-i, --install Install micrOS on micropython
-l, --list_devs_n_bins
List connected devices & micropython binaries.
-ls, --node_ls List micrOS node filesystem content.
-u, --connect_via_usb
Connect via serial port - usb
-b, --backup_node_config
Backup usb connected node config.
-sim, --simulate start micrOS on your computer in simulated mode
-cc, --cross_compile_micros
Cross Compile micrOS system [py -> mpy]
-gw, --gateway Start micrOS Gateway rest-api server
-v, --version Get micrOS version - repo + connected device.
devToolKit.py -c -p '--dev slim01 hello'
Load MicrOS device cache: /Users/bnm/Documents/NodeMcu/MicrOs/tools/device_conn_cache.json
Activate MicrOS device connection address
[i] FUID IP UID
[0] Device: slim01 - 10.0.1.73 - 0x500x20x910x680xc0xf7
Device was found: slim01
hello:slim01:0x500x20x910x680xc0xf7
devToolKit.py -c -p '--dev BedLamp help'
[MICROS] - built-in shell commands
hello - hello msg - for device identification
version - returns micrOS version
exit - exit from shell socket prompt
reboot - system soft reboot (vm), hard reboot (hw): reboot -h
webrepl - start webrepl, for file transfers use with --update
[CONF] Configure mode - built-in shell commands
conf - Enter conf mode
dump - Dump all data
key - Get value
key value - Set value
noconf - Exit conf mode
[TASK] postfix: &x - one-time, &&x - periodic, x: wait ms [x min: 20ms]
task list - list tasks with <tag>s
task kill <tag> - stop task
task show <tag> - show task output
[EXEC] Command mode (LMs):
help lm - list ALL LoadModules
cct
help
co2
help
dht22
help
intercon
help
robustness
help
system
helpdevToolKit.py -c -p '--dev BedLamp conf <a> dump'
staessid : <your-wifi-passwd>
devip : 10.0.1.204
version : 1.11.0-1
devfid : BedLamp
cron : True
cronseq : 3000
soctout : 10
irq2_cbf : n/a
stapwd : <your-wifi-name>
dbg : False
irq2 : False
irq1 : False
irq1_cbf : n/a
appwd : ADmin123
irq2_trig : n/a
hwuid : micr7c9ebd623ff8OS
crontasks : sunset!cct toggle True;*:0:30:0!cct toggle False;*:5:0:0!cct toggle False
timirq : True
irq3 : False
irq3_cbf : n/a
irq4 : False
irq4_cbf : n/a
irq4_trig : n/a
nwmd : STA
timirqcbf : system ha_sta
irq_prell_ms: 300
boothook : cct load
aioqueue : 3
auth : False
timirqseq : 60000
utc : 60
boostmd : True
socport : 9008
irq3_trig : n/a
irq1_trig : n/a
guimeta : ...
cstmpmap : n/a
devToolKit.py -c -p '--dev BedLamp system info'
CPU clock: 24 [MHz]
Mem usage: 71.0 %
FS usage: 14.6 %
upython: v1.19.1 on 2022-06-18
board: ESP32 module with ESP32
mac: 7c:9e:bd:62:3f:f8
uptime: 0 1:29:19
micrOS/toolkit/user_data/device_conn_cache.json
{
"__devuid__": [
"192.168.4.1",
9008,
"__device_on_AP__"
],
"__localhost__": [
"127.0.0.1",
9008,
"__simulator__"
],
"micr500291863428OS": [
"10.0.1.72",
9008,
"BedLamp"
]
}devToolKit.py -c
or
devToolKit.py -connect
[i] FUID IP UID
[0] Device: __device_on_AP__ - 192.168.4.1 - __devuid__
[1] Device: __simulator__ - 127.0.0.1 - __localhost__
[2] Device: BedLamp - 10.0.1.72 - micr500291863428OS
Choose a device index: 5
Device was selected: ['10.0.1.204', 9008, 'Cabinet']
BedLamp $ help
[MICROS] - built-in shell commands
hello - hello msg - for device identification
version - returns micrOS version
exit - exit from shell socket prompt
reboot - system soft reboot (vm), hard reboot (hw): reboot -h
webrepl - start webrepl, for file transfers use with --update
[CONF] Configure mode - built-in shell commands
conf - Enter conf mode
dump - Dump all data
key - Get value
key value - Set value
noconf - Exit conf mode
[TASK] postfix: &x - one-time, &&x - periodic, x: wait ms [x min: 20ms]
task list - list tasks with <tag>s
task kill <tag> - stop task
task show <tag> - show task output
[EXEC] Command mode (LMs):
help lm - list ALL LoadModules
cct
help
co2
help
dht22
help
intercon
help
robustness
help
system
help
BedLamp $ exit
Bye!
Core micrOS resources
1 154 Time.py (mlint: True) (pylint: 9.17) (ref.: 6)
2 104 micrOSloader.py (mlint: True) (pylint: 7.59) (ref.: 1)
3 50 Hooks.py (mlint: True) (pylint: 9.68) (ref.: 1)
4 418 Server.py (mlint: True) (pylint: 9.29) (ref.: 4)
5 454 Tasks.py (mlint: True) (pylint: 9.71) (ref.: 13)
6 185 Config.py (mlint: True) (pylint: 9.44) (ref.: 13)
7 9 reset.py (mlint: True) (pylint: 8.75) (ref.: 0)
8 225 Shell.py (mlint: True) (pylint: 9.61) (ref.: 1)
9 179 Notify.py (mlint: True) (pylint: 9.55) (ref.: 2)
10 77 Types.py (mlint: True) (pylint: 9.69) (ref.: 11)
11 157 Common.py (mlint: True) (pylint: 9.1) (ref.: 24)
12 153 InterConnect.py (mlint: True) (pylint: 9.4) (ref.: 1)
13 177 Debug.py (mlint: True) (pylint: 8.72) (ref.: 22)
14 164 Network.py (mlint: True) (pylint: 9.71) (ref.: 10)
15 183 Scheduler.py (mlint: True) (pylint: 9.61) (ref.: 1)
16 113 microIO.py (mlint: True) (pylint: 9.08) (ref.: 38)
17 49 micrOS.py (mlint: True) (pylint: 9.3) (ref.: 1)
18 113 Interrupts.py (mlint: True) (pylint: 9.05) (ref.: 2)
19 15 main.py (mlint: True) (pylint: 8.89) (ref.: 0)
20 117 urequests.py (mlint: True) (pylint: 8.9) (ref.: 4)
SUM CODE LINES (WITH COMMENTS, WITHOUT EMPTY LINES): 3096
micrOS Load Module resources
1 231 LM_roboarm.py (mlint: True) (pylint: 9.11) (ref.: 0)
2 122 LM_stepper.py (mlint: True) (pylint: 8.9) (ref.: 1)
3 118 LM_genIO.py (mlint: True) (pylint: 7.26) (ref.: 1)
4 498 LM_oled_ui.py (mlint: False) (pylint: 8.83) (ref.: 0)
5 190 LM_system.py (mlint: True) (pylint: 7.57) (ref.: 3)
6 63 LM_robustness.py (mlint: True) (pylint: 7.5) (ref.: 0)
7 115 LM_co2.py (mlint: True) (pylint: 8.42) (ref.: 3)
8 34 LM_rest.py (mlint: False) (pylint: 7.0) (ref.: 0)
9 266 LM_oled.py (mlint: True) (pylint: 9.23) (ref.: 3)
10 72 LM_tinyrgb.py (mlint: True) (pylint: 7.95) (ref.: 0)
11 96 LM_aht10.py (mlint: True) (pylint: 8.73) (ref.: 0)
12 293 LM_bme280.py (mlint: True) (pylint: 8.03) (ref.: 0)
13 37 LM_ph_sensor.py (mlint: True) (pylint: 5.79) (ref.: 0)
14 241 LM_buzzer.py (mlint: True) (pylint: 8.83) (ref.: 0)
15 199 LM_switch.py (mlint: True) (pylint: 8.56) (ref.: 2)
16 113 LM_servo.py (mlint: True) (pylint: 7.73) (ref.: 4)
17 53 LM_rgbcct.py (mlint: True) (pylint: 8.62) (ref.: 0)
18 284 LM_oled_sh1106.py (mlint: True) (pylint: 8.79) (ref.: 1)
19 150 LM_ld2410.py (mlint: True) (pylint: 9.07) (ref.: 0)
20 273 LM_neopixel.py (mlint: True) (pylint: 7.59) (ref.: 2)
21 274 LM_cct.py (mlint: True) (pylint: 8.83) (ref.: 1)
22 38 LM_L9110_DCmotor.py (mlint: True) (pylint: 7.69) (ref.: 0)
23 256 LM_neoeffects.py (mlint: True) (pylint: 6.91) (ref.: 0)
24 30 LM_i2c.py (mlint: True) (pylint: 5.71) (ref.: 0)
25 69 LM_dht22.py (mlint: True) (pylint: 8.0) (ref.: 0)
26 59 LM_L298N_DCmotor.py (mlint: True) (pylint: 8.78) (ref.: 0)
27 37 LM_esp32.py (mlint: True) (pylint: 4.38) (ref.: 0)
28 56 LM_pet_feeder.py (mlint: True) (pylint: 7.88) (ref.: 0)
29 82 LM_rencoder.py (mlint: True) (pylint: 8.92) (ref.: 0)
30 247 LM_keychain.py (mlint: False) (pylint: 9.14) (ref.: 0)
31 69 LM_dht11.py (mlint: True) (pylint: 8.0) (ref.: 0)
32 74 LM_telegram.py (mlint: False) (pylint: 8.94) (ref.: 0)
33 177 LM_OV2640.py (mlint: False) (pylint: 9.06) (ref.: 0)
34 249 LM_rgb.py (mlint: True) (pylint: 8.66) (ref.: 1)
35 62 LM_distance.py (mlint: True) (pylint: 8.14) (ref.: 0)
36 313 LM_VL53L0X.py (mlint: True) (pylint: 9.07) (ref.: 0)
37 107 LM_light_sensor.py (mlint: True) (pylint: 8.94) (ref.: 0)
38 12 LM_rp2w.py (mlint: True) (pylint: 4.44) (ref.: 0)
39 190 LM_presence.py (mlint: True) (pylint: 8.75) (ref.: 4)
40 29 LM_dashboard_be.py (mlint: True) (pylint: 6.5) (ref.: 0)
41 170 LM_dimmer.py (mlint: True) (pylint: 8.22) (ref.: 0)
42 66 LM_demo.py (mlint: False) (pylint: 8.21) (ref.: 0)
43 105 LM_lmpacman.py (mlint: True) (pylint: 8.38) (ref.: 0)
44 176 LM_gameOfLife.py (mlint: True) (pylint: 9.29) (ref.: 2)
45 58 LM_catgame.py (mlint: True) (pylint: 8.46) (ref.: 0)
46 42 LM_intercon.py (mlint: True) (pylint: 8.18) (ref.: 3)
47 43 LM_ds18.py (mlint: True) (pylint: 5.0) (ref.: 2)
48 250 LM_i2s_mic.py (mlint: False) (pylint: 8.71) (ref.: 1)
49 34 LM_sdcard.py (mlint: True) (pylint: 7.88) (ref.: 0)
SUM CODE LINES (WITH COMMENTS, WITHOUT EMPTY LINES): 6822
LM (Load Modules) - Application logic - accessable over socket server as a command
You can easly copy the
Template_app.py, and create a new socket based app. Template_app.py
micrOS/toolkit/dashboard_apps
│ ├── AirQualityBME280_app.py
│ ├── AirQualityDHT22_CO2_app.py
│ ├── AnalogCCT_app.py
│ ├── AnalogRGB_app.py
│ ├── CatGame_app.py
│ ├── Dimmer_app.py
│ ├── GetVersion_app.py
│ ├── GetVersion_app.pyc
│ ├── NeopixelTest_app.py
│ ├── RoboArm_app.py
│ ├── SysCheck_app.py
│ ├── Template_app.py
micrOS/toolkit/user_data
│ ├── device_conn_cache.json <- connection cache
│ └── node_config_archive
│ ├── BigRGB-node_config.json
│ ├── Chillight-node_config.json
│ ├── Kapcsolo230-node_config.json
│ ├── LampController-node_config.json
│ ├── MeasureNode-node_config.json
│ ├── MrGreen-node_config.json
│ ├── RingLamp-node_config.json
│ └── test-node_config.json
micrOS/env/
├── __init__.py
├── driver_cp210x
│ ├── CP210x_Universal_Windows_Driver
│ └── macOS_VCP_Driver
├── requirements.txt
└── venv
├── bin
├── include
├── lib
└── pyvenv.cfg
micrOS/toolkit/workspace/precompiled
│ ├── BgJob.mpy
│ ├── Common.mpy
│ ├── ConfigHandler.mpy
│ ├── Debug.mpy
│ ├── Hooks.mpy
│ ├── InterConnect.mpy
│ ├── InterpreterCore.mpy
│ ├── InterpreterShell.mpy
│ ├── InterruptHandler.mpy
│ ├── LM_L298N_DCmotor.mpy
│ ├── LM_L9110_DCmotor.py
│ ├── LM_VL53L0X.py
│ ├── LM_bme280.mpy
│ ├── LM_buzzer.mpy
│ ├── LM_catgame.py
│ ├── LM_cct.mpy
│ ├── LM_co2.mpy
│ ├── LM_dht11.mpy
│ ├── LM_dht22.mpy
│ ├── LM_dimmer.mpy
│ ├── LM_distance_HCSR04.py
│ ├── LM_ds18.mpy
│ ├── LM_esp32.py
│ ├── LM_genIO.mpy
│ ├── LM_i2c.py
│ ├── LM_intercon.mpy
│ ├── LM_light_sensor.mpy
│ ├── LM_neoeffects.mpy
│ ├── LM_neopixel.mpy
│ ├── LM_oled.mpy
│ ├── LM_oled_ui.mpy
│ ├── LM_pet_feeder.py
│ ├── LM_ph_sensor.py
│ ├── LM_rgb.mpy
│ ├── LM_roboarm.mpy
│ ├── LM_robustness.py
│ ├── LM_servo.mpy
│ ├── LM_stepper.mpy
│ ├── LM_switch.mpy
│ ├── LM_system.mpy
│ ├── LM_tinyrgb.mpy
│ ├── IO_esp32.mpy
│ ├── IO_tinypico.mpy
│ ├── LogicalPins.mpy
│ ├── Network.mpy
│ ├── Scheduler.mpy
│ ├── SocketServer.mpy
│ ├── Time.mpy
│ ├── TinyPLed.mpy
│ ├── boot.py
│ ├── micrOS.mpy
│ ├── micrOSloader.mpy
│ └── reset.mpy
Note: From the
micrOS/source/by default the LMs are not compiling, to extend complied LM list add LM explicitly to the following file:
micrOs/toolkit/LM_to_compile.dat
-
Save screen console buffer (output) Press
ctrl + A :and typehardcopy -h <filename> -
Create callgraph: pycallgraph
-
Convert PNG/JPG-s to GIF:
convert -delay 60 ./*.png mygif.gif -
micrOS core and Load Module source code info:
devToolKit.py -lint
OR
devToolKit.py --linter[BETA] service setup tool:
toolkit/helper_scripts/linux_service/make.bash
-
Prerequisite: install micrOS devtoolkit PiP package
-
Create service: micrOS gateway service
-
[1] create
micros-gw.servicefile:
[Unit]
Description=micrOS gateway REST API service
After=network-online.target
[Service]
Environment="API_AUTH=<usr_name>:<password>" <-- replace
ExecStart=/usr/bin/python3 -m devToolKit -gw <-- check (depends on deployment) OR /bin/bash
WorkingDirectory=/home/gateway <-- replace
StandardOutput=inherit
StandardError=inherit
Restart=always
User=<user> <-- replace
[Install]
WantedBy=multi-user.target-
[2] copy service to
sudo cp micros-gw.service /lib/systemd/system/ -
[3] start service:
sudo systemctl start micros-gw.service -
[4] enable service at bootup:
sudo systemctl enable micros-gw.service -
[5] show service state:
sudo systemctl status micros-gw.service
-
Add git tag:
git tag -a vX.Y.Z-K -m "tag message" -
Publish tags:
git push origin --tags -
Pretty git view:
git log --pretty=oneline -
File change list:
git diff --name-only fbb4875609a3c0ee088b6a118ebf9f8a500be0fd HEAD | grep 'mpy-MicrOS' -
GitHub embed youtube link:
https://github.com/itskeshav/Add-youtube-link-in-Readme.md -
Git history visualization with Gource
gource \
--highlight-users \
--hide filenames \
--file-idle-time 0 \
--max-files 0 \
--seconds-per-day 0.01 \
--auto-skip-seconds 1 \
--title "micrOS Evolution" \
--output-ppm-stream - \
| ffmpeg -y -r 30 -f image2pipe -vcodec ppm -i - -vcodec libx264 -preset ultrafast -pix_fmt yuv420p -crf 1 -threads 0 -bf 0 output.mp4git push -u origin master