


rl8 is a minimal end-to-end RL library that can simulate highly parallelized, infinite horizon environments, and can train a PPO policy using those environments, achieving up to 1M environment transitions (and one policy update) per second using a single NVIDIA RTX 2080.
- Documentation: https://theogognf.github.io/rl8/
- PyPI: https://pypi.org/project/rl8/
- Repository: https://github.com/theOGognf/rl8
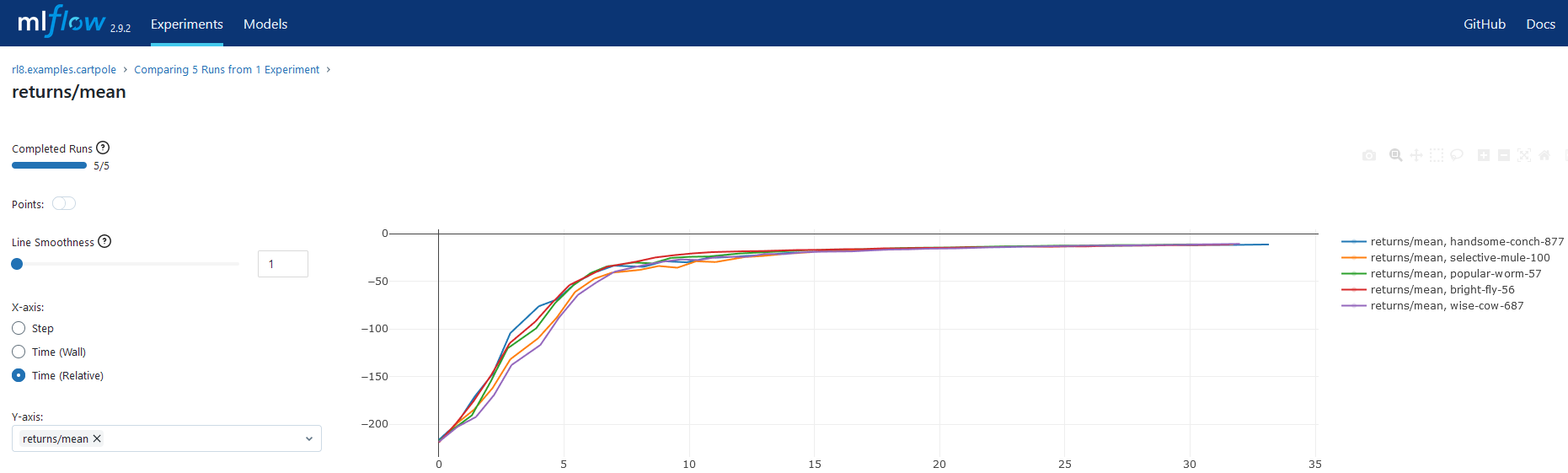
The figure below depicts rl8's experiment tracking integration with MLflow and rl8's ability to solve reinforcement learning problems within seconds.
Install with pip for the latest stable version.
pip install rl8Install from GitHub for the latest unstable version.
git clone https://github.com/theOGognf/rl8.git
pip install ./rl8/Train a policy with PPO and log training progress with MLflow using the high-level trainer interface (this updates the policy indefinitely).
from rl8 import Trainer
from rl8.env import DiscreteDummyEnv
trainer = Trainer(DiscreteDummyEnv)
trainer.run()Collect environment transitions and update a policy directly using the low-level algorithm interface (this updates the policy once).
from rl8 import Algorithm
from rl8.env import DiscreteDummyEnv
algo = Algorithm(DiscreteDummyEnv)
algo.collect()
algo.step()The trainer interface is the most popular interface for policy training workflows, whereas the algorithm interface is useful for lower-level customization of policy training workflows.
rl8 is minimal in that it limits the number of interfaces required for training a policy with PPO without restrictions on observation and action specs, custom models, and custom action distributions.
rl8 is built around six key concepts:
- The environment: The simulation that the policy learns to interact with. The environment definition is a bit different from your typical environment definition from other RL libraries.
- The model: The policy parameterization that determines how the policy processes environment observations and how parameters for the action distribution are generated.
- The action distribution: The mechanism for representing actions conditioned on environment observations and model outputs. Environment actions are ultimately sampled from the action distribution.
- The policy: The union of the model and the action distribution that actually calls and samples from the model and action distribution, respectively.
- The algorithm: The PPO implementation that uses the environment to train the policy (i.e., update the model's parameters).
- The trainer: The high-level interface for using the algorithm to train indefinitely or until some condition is met. The trainer directly integrates with MLflow to track experiments and training progress.
These short snippets showcase rl8's main features. See the examples for complete implementations of rl8-compatible environments and models.
Use a custom distribution and custom hyperparameters by passing options to the trainer (or algorithm) interface.
from rl8 import SquashedNormal, Trainer
from rl8.env import ContinuousDummyEnv
trainer = Trainer(
ContinuousDummyEnv,
distribution_cls=SquashedNormal,
gae_lambda=0.99,
gamma=0.99,
)
trainer.run()Swap to the recurrent flavor of the trainer (or algorithm) interface to train a recurrent model and policy.
from rl8 import RecurrentTrainer
from rl8.env import DiscreteDummyEnv
trainer = RecurrentTrainer(DiscreteDummyEnv)
trainer.run()Specify the device used across the environment, model, and algorithm.
from rl8 import Trainer
from rl8.env import DiscreteDummyEnv
trainer = Trainer(DiscreteDummyEnv, device="cuda")
trainer.run()Enable policy updates with gradient accumulation and/or Automatic Mixed Precision (AMP) to minimize GPU memory usage so you can simulate more environments or use larger models.
import torch.optim as optim
from rl8 import Trainer
from rl8.env import DiscreteDummyEnv
trainer = Trainer(
DiscreteDummyEnv,
optimizer_cls=optim.SGD,
accumulate_grads=True,
enable_amp=True,
sgd_minibatch_size=8192,
device="cuda",
)
trainer.run()Specify conditions based on training statistics to stop training early.
from rl8 import Trainer
from rl8.conditions import Plateaus
from rl8.env import DiscreteDummyEnv
trainer = Trainer(DiscreteDummyEnv)
trainer.run(stop_conditions=[Plateaus("returns/mean", rtol=0.05)])Suppose ./config.yaml contains the following.
# Fully qualified path to the environment's definition.
env_cls: rl8.env.ContinuousDummyEnv
# Some custom parameters.
gamma: 0.75
horizon: 8Train a policy with the trainer interface using the rl8 train CLI.
rl8 train -f config.yamlTL;DR: rl8 focuses on a niche subset of RL that simplifies the overall library while allowing fast and fully customizable environments, models, and action distributions.
There are many high quality, open-sourced RL libraries. Most of them take on the daunting task of being a monolithic, one-stop-shop for everything RL, attempting to support as many algorithms, environments, models, and compute capabilities as possible. Naturely, this monolothic goal has some drawbacks:
- The software becomes more dense with each supported feature, making the library all-the-more difficult to customize for a specific use case.
- The software becomes less performant for a specific use case. RL practitioners typically end up accepting the cost of transitioning to expensive and difficult-to-manage compute clusters to get results faster.
Rather than focusing on being a monolithic RL library, rl8 fills the niche of maximizing training performance for a few key assumptions:
- Environments are highly parallelized and their parallelization is entirely managed within the environment. This allows rl8 to ignore distributed computing design considerations.
- Environments are infinite horizon (i.e., they have no terminal conditions). This allows rl8 to reset environments at the same, fixed horizon intervals, greatly simplifying environment and algorithm implementations.
- The only supported ML framework is PyTorch and the only supported algorithm is PPO. This allows rl8 to ignore layers upon layers of abstraction, greatly simplifying the overall library implementation.
The end result is a minimal and high throughput library that can train policies to solve complex tasks within minutes on consumer grade compute devices.
Unfortunately, this means rl8 doesn't support as many use cases as a monolithic RL library might. In fact, rl8 is probably a bad fit for your use case if:
- Your environment isn't parallelizable.
- Your environment must contain terminal conditions and can't be reformulated as an infinite horizon task.
- You want to use an ML framework that isn't PyTorch or you want to use an algorithm that isn't a variant of PPO.
However, if rl8 does fit your use case, it can do wonders for your RL workflow.
- PureJaxRL: PureJaxRL is a high-performance, end-to-end RL library. Think of it like rl8's Jax equivalent, but more general in that it doesn't focus on infinite horizon tasks.
- RL Games: RL Games is a high performance RL library built around popular environment protocols.
- RLlib: Ray's RLlib is the industry standard RL library that supports many popular RL algorithms. RLlib can scale RL workloads from your laptop all the way to the cloud with little-to-no changes to your code.
- Sample Factory: Sample Factory provides an efficient and high quality implementation of PPO with a focus on accelerating training for a single machine with support for a wide variety of environment protocols.
- SKRL: SKRL focuses on readability, simplicity, and transparency of RL algorithm implementations with support for a wide variety of environment protocols.
- Stable Baselines 3: Stable Baselines 3 is a set of reliable and user-friendly RL algorithm implementations that integrate with a rich set of features desirable by most practitioners and use cases.
- TorchRL: TorchRL is PyTorch's RL library that's focused on efficient, modular, documented, and tested RL building blocks and algorithm implementations aimed at supporting research in RL. TorchRL is a direct dependency of rl8.
- WarpDrive: WarpDrive is a flexible, lightweight, and easy-to-use open-source RL framework that implements end-to-end multi-agent RL on a single or multiple GPUs. Think of it like rl8, but with an emphasis on support for multi-agent RL and without a focus on infinite horizon tasks.