RAdam+Lookahead optim, TensorBoard, Full Benchmark Upload
This marks a stable release of SLM Lab with full benchmark results
RAdam+Lookahead optimizer
- Lookahead + RAdam optimizer significantly improves the performance of some RL algorithms (A2C (n-step), PPO) on continuous domain problems, but does not improve (A2C (GAE), SAC). #416
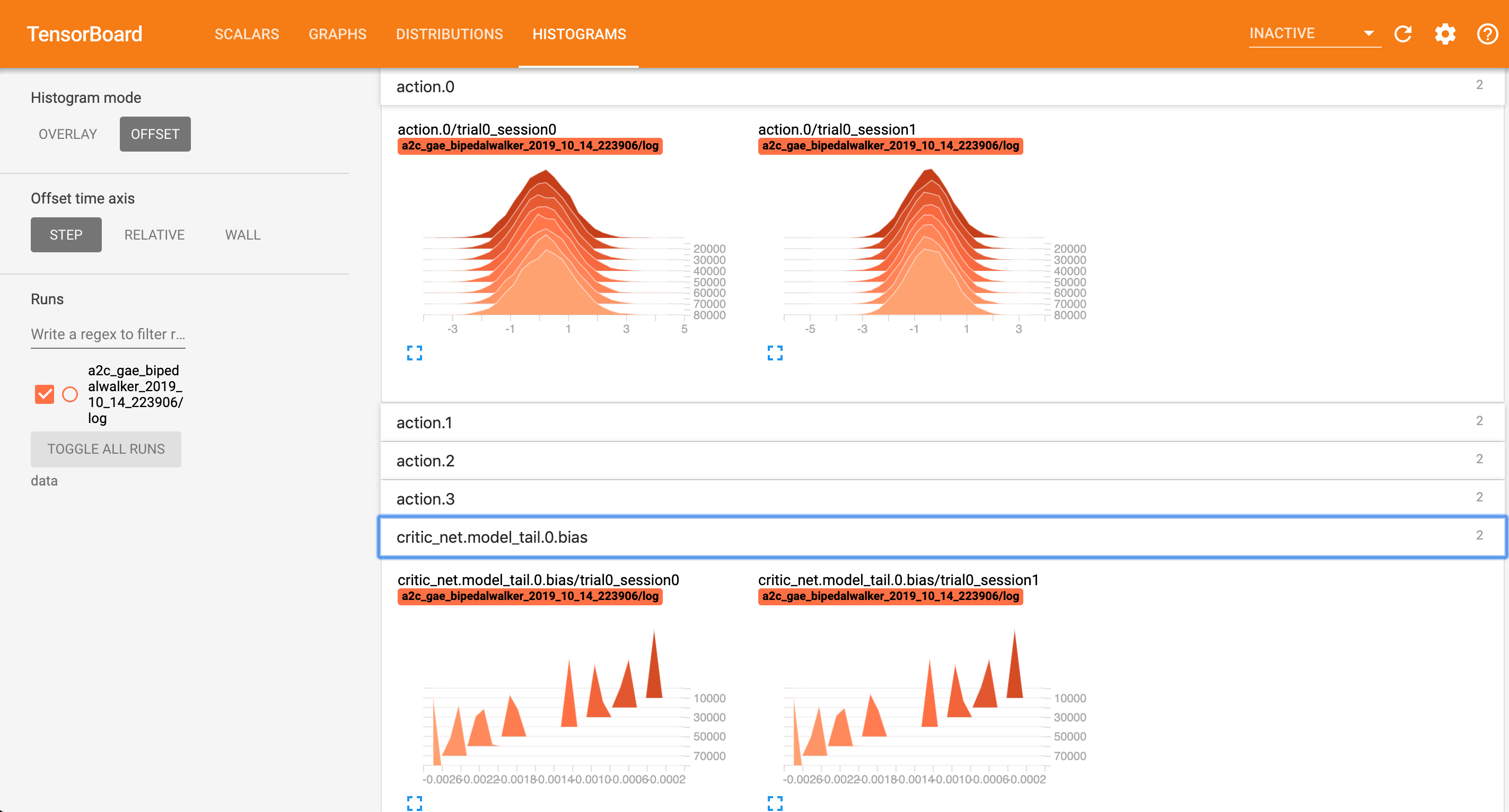
TensorBoard
- Add TensorBoard in body to auto-log summary variables, graph, network parameter histograms, action histogram. To launch TensorBoard, run
tensorboard --logdir=dataafter a session/trial is completed. Example screenshot:
Full Benchmark Upload
Plot Legend
Discrete Benchmark
| Env. \ Alg. | DQN | DDQN+PER | A2C (GAE) | A2C (n-step) | PPO | SAC |
Breakout graph |
80.88 | 182 | 377 | 398 | 443 | - |
Pong graph |
18.48 | 20.5 | 19.31 | 19.56 | 20.58 | 19.87* |
Seaquest graph |
1185 | 4405 | 1070 | 1684 | 1715 | - |
Qbert graph |
5494 | 11426 | 12405 | 13590 | 13460 | 214* |
LunarLander graph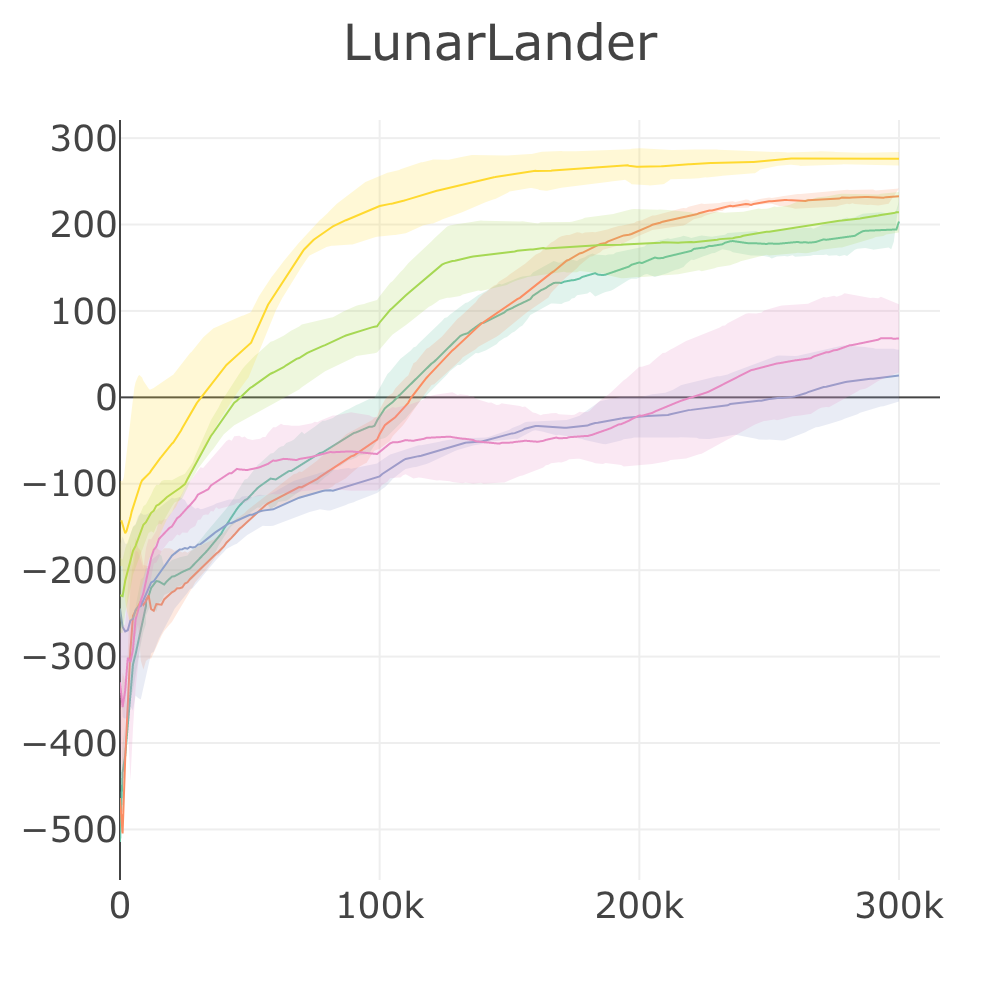 |
192 | 233 | 25.21 | 68.23 | 214 | 276 |
UnityHallway graph |
-0.32 | 0.27 | 0.08 | -0.96 | 0.73 | - |
UnityPushBlock graph |
4.88 | 4.93 | 4.68 | 4.93 | 4.97 | - |
Episode score at the end of training attained by SLM Lab implementations on discrete-action control problems. Reported episode scores are the average over the last 100 checkpoints, and then averaged over 4 Sessions. Results marked with
*were trained using the hybrid synchronous/asynchronous version of SAC to parallelize and speed up training time.
For the full Atari benchmark, see Atari Benchmark
Continuous Benchmark
| Env. \ Alg. | A2C (GAE) | A2C (n-step) | PPO | SAC |
RoboschoolAnt graph |
787 | 1396 | 1843 | 2915 |
RoboschoolAtlasForwardWalk graph |
59.87 | 88.04 | 172 | 800 |
RoboschoolHalfCheetah graph |
712 | 439 | 1960 | 2497 |
RoboschoolHopper graph |
710 | 285 | 2042 | 2045 |
RoboschoolInvertedDoublePendulum graph |
996 | 4410 | 8076 | 8085 |
RoboschoolInvertedPendulum graph |
995 | 978 | 986 | 941 |
RoboschoolReacher graph |
12.9 | 10.16 | 19.51 | 19.99 |
RoboschoolWalker2d graph |
280 | 220 | 1660 | 1894 |
RoboschoolHumanoid graph |
99.31 | 54.58 | 2388 | 2621* |
RoboschoolHumanoidFlagrun graph |
73.57 | 178 | 2014 | 2056* |
RoboschoolHumanoidFlagrunHarder graph |
-429 | 253 | 680 | 280* |
Unity3DBall graph |
33.48 | 53.46 | 78.24 | 98.44 |
Unity3DBallHard graph |
62.92 | 71.92 | 91.41 | 97.06 |
Episode score at the end of training attained by SLM Lab implementations on continuous control problems. Reported episode scores are the average over the last 100 checkpoints, and then averaged over 4 Sessions. Results marked with
*require 50M-100M frames, so we use the hybrid synchronous/asynchronous version of SAC to parallelize and speed up training time.
Atari Benchmark
- Upload PR #427
- Dropbox data: DQN
- Dropbox data: DDQN+PER
- Dropbox data: A2C (GAE)
- Dropbox data: A2C (n-step)
- Dropbox data: PPO
- Dropbox data: all Atari graphs
| Env. \ Alg. | DQN | DDQN+PER | A2C (GAE) | A2C (n-step) | PPO |
Adventure graph |
-0.94 | -0.92 | -0.77 | -0.85 | -0.3 |
AirRaid graph |
1876 | 3974 | 4202 | 3557 | 4028 |
Alien graph |
822 | 1574 | 1519 | 1627 | 1413 |
Amidar graph |
90.95 | 431 | 577 | 418 | 795 |
Assault graph |
1392 | 2567 | 3366 | 3312 | 3619 |
Asterix graph |
1253 | 6866 | 5559 | 5223 | 6132 |
Asteroids graph |
439 | 426 | 2951 | 2147 | 2186 |
Atlantis graph |
68679 | 644810 | 2747371 | 2259733 | 2148077 |
BankHeist graph |
131 | 623 | 855 | 1170 | 1183 |
BattleZone graph |
6564 | 6395 | 4336 | 4533 | 13649 |
BeamRider graph |
2799 | 5870 | 2659 | 4139 | 4299 |
Berzerk graph |
319 | 401 | 1073 | 763 | 860 |
Bowling graph |
30.29 | 39.5 | 24.51 | 23.75 | 31.64 |
Boxing graph |
72.11 | 90.98 | 1.57 | 1.26 | 96.53 |
Breakout graph |
80.88 | 182 | 377 | 398 | 443 |
Carnival graph |
4280 | 4773 | 2473 | 1827 | 4566 |
Centipede graph |
1899 | 2153 | 3909 | 4202 | 5003 |
ChopperCommand graph |
1083 | 4020 | 3043 | 1280 | 3357 |
CrazyClimber graph |
46984 | 88814 | 106256 | 109998 | 116820 |
Defender graph |
281999 | 313018 | 665609 | 657823 | 534639 |
DemonAttack graph |
1705 | 19856 | 23779 | 19615 | 121172 |
DoubleDunk graph |
-21.44 | -22.38 | -5.15 | -13.3 | -6.01 |
ElevatorAction graph |
32.62 | 17.91 | 9966 | 8818 | 6471 |
Enduro graph |
437 | 959 | 787 | 0.0 | 1926 |
FishingDerby graph |
-88.14 | -1.7 | 16.54 | 1.65 | 36.03 |
Freeway graph |
24.46 | 30.49 | 30.97 | 0.0 | 32.11 |
Frostbite graph |
98.8 | 2497 | 277 | 261 | 1062 |
Gopher graph |
1095 | 7562 | 929 | 1545 | 2933 |
Gravitar graph |
87.34 | 258 | 313 | 433 | 223 |
Hero graph |
1051 | 12579 | 16502 | 19322 | 17412 |
IceHockey graph |
-14.96 | -14.24 | -5.79 | -6.06 | -6.43 |
Jamesbond graph |
44.87 | 702 | 521 | 453 | 561 |
JourneyEscape graph |
-4818 | -2003 | -921 | -2032 | -1094 |
Kangaroo graph |
1965 | 8897 | 67.62 | 554 | 4989 |
Krull graph |
5522 | 6650 | 7785 | 6642 | 8477 |
KungFuMaster graph |
2288 | 16547 | 31199 | 25554 | 34523 |
MontezumaRevenge graph |
0.0 | 0.02 | 0.08 | 0.19 | 1.08 |
MsPacman graph |
1175 | 2215 | 1965 | 2158 | 2350 |
NameThisGame graph |
3915 | 4474 | 5178 | 5795 | 6386 |
Phoenix graph |
2909 | 8179 | 16345 | 13586 | 30504 |
Pitfall graph |
-68.83 | -73.65 | -101 | -31.13 | -35.93 |
Pong graph |
18.48 | 20.5 | 19.31 | 19.56 | 20.58 |
Pooyan graph |
1958 | 2741 | 2862 | 2531 | 6799 |
PrivateEye graph |
784 | 303 | 93.22 | 78.07 | 50.12 |
Qbert graph |
5494 | 11426 | 12405 | 13590 | 13460 |
Riverraid graph |
953 | 10492 | 8308 | 7565 | 9636 |
RoadRunner graph |
15237 | 29047 | 30152 | 31030 | 32956 |
Robotank graph |
3.43 | 9.05 | 2.98 | 2.27 | 2.27 |
Seaquest graph |
1185 | 4405 | 1070 | 1684 | 1715 |
Skiing graph |
-14094 | -12883 | -19481 | -14234 | -24713 |
Solaris graph |
612 | 1396 | 2115 | 2236 | 1892 |
SpaceInvaders graph |
451 | 670 | 733 | 750 | 797 |
StarGunner graph |
3565 | 38238 | 44816 | 48410 | 60579 |
Tennis graph |
-23.78 | -10.33 | -22.42 | -19.06 | -11.52 |
TimePilot graph |
2819 | 1884 | 3331 | 3440 | 4398 |
Tutankham graph |
35.03 | 159 | 161 | 175 | 211 |
UpNDown graph |
2043 | 11632 | 89769 | 18878 | 262208 |
Venture graph |
4.56 | 9.61 | 0.0 | 0.0 | 11.84 |
VideoPinball graph |
8056 | 79730 | 35371 | 40423 | 58096 |
WizardOfWor graph |
869 | 328 | 1516 | 1247 | 4283 |
YarsRevenge graph |
5816 | 15698 | 27097 | 11742 | 10114 |
Zaxxon graph |
442 | 54.28 | 64.72 | 24.7 | 641 |
The table above presents results for 62 Atari games. All agents were trained for 10M frames (40M including skipped frames). Reported results are the episode score at the end of training, averaged over the previous 100 evaluation checkpoints with each checkpoint averaged over 4 Sessions. Agents were checkpointed every 10k training frames.