{kind=link}
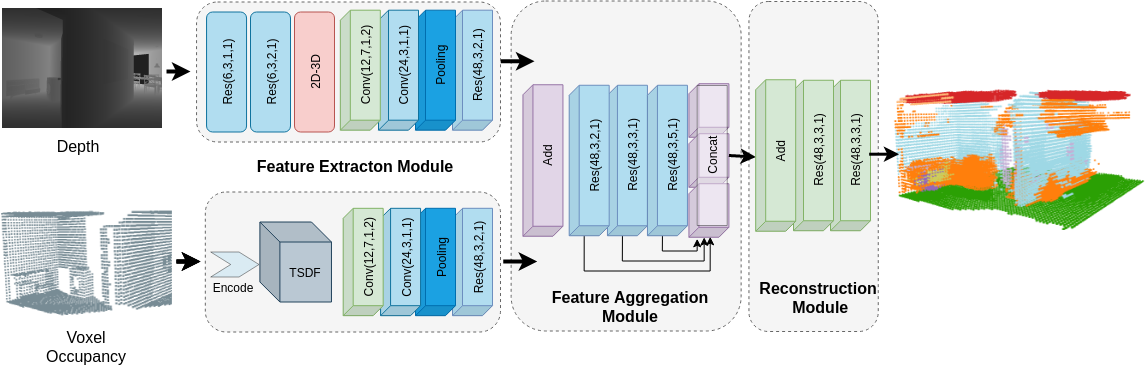
A 3D Convolutional Neural Network for semantic scene completions from depth maps
- pytorch≥1.4.0
- torch_scatter
- imageio
- scipy
- scikit-learn
- tqdm
You can install the requirements by running pip install -r requirements.txt.
If you use other versions of PyTorch or CUDA, be sure to select the corresponding version of torch_scatter.
The raw data can be found in SSCNet.
The repackaged data can be downloaded via Google Drive or BaiduYun(Access code:lpmk).
The repackaged data includes:
rgb_tensor = npz_file['rgb'] # pytorch tensor of color image
depth_tensor = npz_file['depth'] # pytorch tensor of depth
tsdf_hr = npz_file['tsdf_hr'] # flipped TSDF, (240, 144, 240)
tsdf_lr = npz_file['tsdf_lr'] # flipped TSDF, ( 60, 36, 60)
target_hr = npz_file['target_hr'] # ground truth, (240, 144, 240)
target_lr = npz_file['target_lr'] # ground truth, ( 60, 36, 60)
position = npz_file['position'] # 2D-3D projection mapping indexConfigure the data path in config.py
'train': '/path/to/your/training/data'
'val': '/path/to/your/testing/data'
Edit the training script run_SSC_train.sh, then run
bash run_SSC_train.sh
Edit the testing script run_SSC_test.sh, then run
bash run_SSC_test.sh
The SSC Network is deployed as ROS node for scene completions from depth topics. Please follow the follow instructuon for setting up ROS scene completion node.
-
A python library providing C++ (CPU/CUDA) backend implementations for:
- Fixed size TSDF volume computation from a single depth image
- Fixed size 3D Volumetric grid computation by probabilistically fusing pointcloud (for SCFusion)
- 3D projection indices from a 2D depth image
NOTE: CUDA 10.2 is required for GPU backend.
Install the python extension from voxel_utils folder for inference on depth images from ROS topics:
cd voxel_utils
make #compile C++/CUDA code
pyhton setup.py install # install the package into current python environmentpython infer_ros.py --model palnet --resume trained_model.pth
A pretreined model can be download from here.
NOTE: Make sure to activate catkin workspace before starting inference.
The Semantic Scene Completion Networks are adapted from PALNet and DDRNet. Please cite the respective papers:
@InProceedings{Li2019ddr,
author = {Li, Jie and Liu, Yu and Gong, Dong and Shi, Qinfeng and Yuan, Xia and Zhao, Chunxia and Reid, Ian},
title = {RGBD Based Dimensional Decomposition Residual Network for 3D Semantic Scene Completion},
booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
month = {June},
pages = {7693--7702},
year = {2019}
}
@article{li2019palnet,
title={Depth Based Semantic Scene Completion With Position Importance Aware Loss},
author={Li, Jie and Liu, Yu and Yuan, Xia and Zhao, Chunxia and Siegwart, Roland and Reid, Ian and Cadena, Cesar},
journal={IEEE Robotics and Automation Letters},
volume={5},
number={1},
pages={219--226},
year={2019},
publisher={IEEE}
}