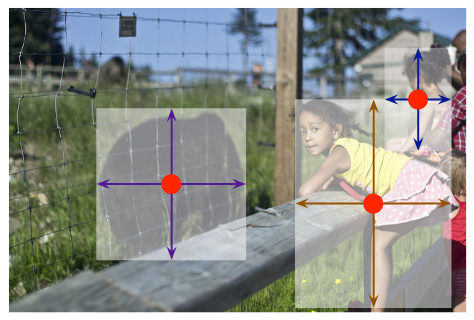
Detection identifies objects as axis-aligned boxes in an image. Most successful object detectors enumerate a nearly exhaustive list of potential object locations and classify each. This is wasteful, inefficient, and requires additional post-processing. In this paper, we take a different approach. We model an object as a single point --- the center point of its bounding box. Our detector uses keypoint estimation to find center points and regresses to all other object properties, such as size, 3D location, orientation, and even pose. Our center point based approach, CenterNet, is end-to-end differentiable, simpler, faster, and more accurate than corresponding bounding box based detectors. CenterNet achieves the best speed-accuracy trade-off on the MS COCO dataset, with 28.1% AP at 142 FPS, 37.4% AP at 52 FPS, and 45.1% AP with multi-scale testing at 1.4 FPS. We use the same approach to estimate 3D bounding box in the KITTI benchmark and human pose on the COCO keypoint dataset. Our method performs competitively with sophisticated multi-stage methods and runs in real-time.
| Backbone | DCN | Mem (GB) | Box AP | Flip box AP | Config | Download |
|---|---|---|---|---|---|---|
| ResNet-18 | N | 3.45 | 25.9 | 27.3 | config | model | log |
| ResNet-18 | Y | 3.47 | 29.5 | 30.9 | config | model | log |
Note:
- Flip box AP setting is single-scale and
flip=True. - Due to complex data enhancement, we find that the performance is unstable and may fluctuate by about 0.4 mAP. mAP 29.4 ~ 29.8 is acceptable in ResNet-18-DCNv2.
- Compared to the source code, we refer to CenterNet-Better, and make the following changes
- fix wrong image mean and variance in image normalization to be compatible with the pre-trained backbone.
- Use SGD rather than ADAM optimizer and add warmup and grad clip.
- Use DistributedDataParallel as other models in MMDetection rather than using DataParallel.
| Backbone | Style | Lr schd | MS train | Mem (GB) | Box AP | Config | Download |
|---|---|---|---|---|---|---|---|
| ResNet-50 | caffe | 1x | True | 3.3 | 40.2 | config | model | log |
CenterNet Update from the paper of Probabilistic two-stage detection. The author has updated CenterNet to greatly improve performance and convergence speed. The Details are as follows:
- Using top-left-right-bottom box encoding and GIoU Loss
- Adding regression loss to the center 3x3 region
- Adding more positive pixels for the heatmap loss whose regression loss is small and is within the center3x3 region
- Using RetinaNet-style optimizer (SGD), learning rate rule (0.01 for each batch size 16), and schedule (12 epochs)
- Added FPN neck layers, and assigns objects to FPN levels based on a fixed size range.
- Using standard NMS instead of max pooling
@article{zhou2019objects,
title={Objects as Points},
author={Zhou, Xingyi and Wang, Dequan and Kr{\"a}henb{\"u}hl, Philipp},
booktitle={arXiv preprint arXiv:1904.07850},
year={2019}
}