This project has been written for the exam of Artificial Intelligence Laboratory at the University of Turin.
It consists in an implementation of Iterative Deepening, A* and IDA* in Prolog with two domains, a labyrinth and the 8 tile game (and also a 15 tile game).
I recommend using VSCode with the extension VSC-Prolog (of course you need to have SWIProlog installed and then follow the instructions on the plugin page to setup the runnable path). Then clone the repo and open the folder with VSCode.
In The top level folder there are 3 main files: astar.pl, idastar.pl and iterative_deepening.pl. Each of them contains the code for their respective algorithm. Notice the import at the first line of each file:
:-['./{domain_folder}/loader.pl', 'utils.pl'].
Change the {domain_folder} with either labyrinth or tile_game to load their respective domain.
If you followed my recommendations, you can easily load and run the program just by opening one of them and pressing ALT+X and L (NB do not keep pressing ALT while pressing L).
Each domain is self contained inside its respective folder. The loader.pl file inside them allows to load all the necessary predicates to explore the domain. All the domain specific predicates uses standardized names so that all the algorithms don't have to handle the specifications of each one.
File structure:
- A set of knowledge bases files for both labyrinth and tile game domain.
actions.plcontains the set of actions allowed in that domain with their transformations.- The predicate
allowed(action, S)checks if anactionfrom a given stateSis allowed. For each action there is anallowed/2predicate. move(action, S, S1)is used as a function whereactionis the action to apply in the given stateS,S1in the new state where the action has led. Note thatmove/3does not check ifallowed/2.maxDepth(D)unifiesDwith the maxium depth of the domain.cost(S, S1, C)is used as function that given the input statesSandS1calculate inCthe cost of the transition fromStoS1.
- The predicate
heuristic.plcontains the predicates used to calculate the heuristic of the specified domain.heuristic(S, Sol, E)is used to calculate the heuristic valueEof stateS;Solis the solution of the relaxed problem, often ignored.
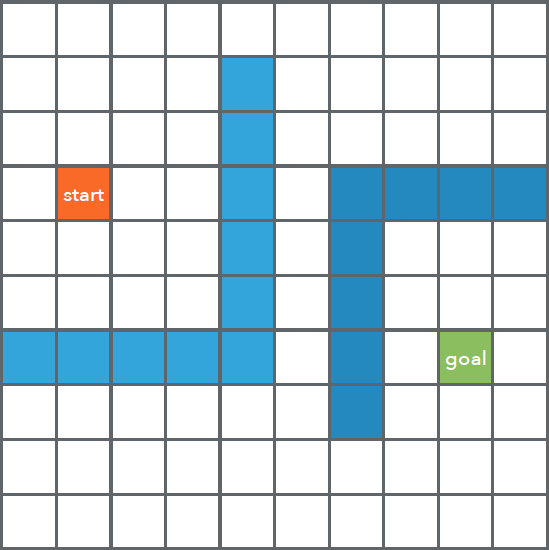
This domain represent a labyrinth using the predicate pos(X, Y) where X and Y are the agent position coordinates. Similarly the blue walls are represented by occupied(pos(X, Y)). allowed/2 just checks if the action doesn't lead outside the labyrinth or inside a blue block, while move/3 generate the new state.
The heuristic used here is the manhattan distance that ignores the blue squares.
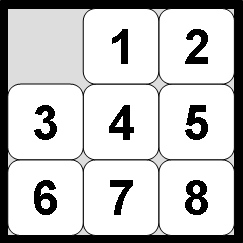
Both domains are represent by using two predicates (this one below represents a 8 tile game):
initialPosition([2,4,3,7,1,6,v,5,8]).
finalPosition([1,2,3,4,5,6,7,8,v]).
The game columns/rows number is expressed by dim(n) inside the knowledge bases files, the order of the tiles is expressed by the above mentioned list of lenght n*n (this domain has n = 3 which means a list lenght of 9).
The v inside the list represent the void tile that can be moved up, down, left and right. To check if the action is allowed/2 the predicate uses nth0/3 to get the position of the void tile, then through some mathematical magic, checks if the action can be done or not.
The heuristic used here is the sum of the Manhattan distances of every tile from its desidered position. Some other mathematical magic helps us doing the job once again.
-
iterative_deepening.plimplements an iterative deepening search exploiting the innate Prolog's depth search inside the space of possibile variables unifications. The code is pretty self explanatory. -
astar.plimplements the heuristic driven search algorithm A*. The basic data structure is the predicatenode/4. The algorithm is implemented by 3 predicates:astar/1: allows to starts the search and fill the only parameter with a list of moves to reach the solution.astar_search/3: the predicates that implements the search; it has 3 parameters, the first is a list of the frontier nodes, the second is a list of already visited ones, while the third is a list of actions that represent the solution.generateSons/4: allows to generate the children of a given node, checking all the allowed actions in that node.
-
idastar.plimplements the heuristic driven search algorithm IDA*. The basic data structure is the predicateida_node/2. The algorithm is implemented by 3 predicates:ida/1: allows to calculate the initial threshold, starts the search and fill the only parameter with a list of moves to reach the solution.idastar/5: the predicates starts the search through the predicateida_search/5and allows to calculate a new threshold in case it returns false.ida_search/5: the predicates that implements the IDA* search.
All the statistics have been reported in the prolog-statistics.pdf file. Here you can see two meaningful examples:


- Cesare Iurlaro - CesareIurlaro
- Giuseppe Gabbia - beppe95
- Lamberto Basti - lamba92