This article explains how to set up and use ArduPlanner to work with Gazebo SITL
OctomapPlanner is a library for autonomous mapping and planning specifically designed for ArduPilot Copter. It uses Octomap for 3D occupancy mapping and OMPL and FCL for goal-directed planning with collision avoidance.
This library is still under development and has only been tested to work with Gazebo SITL for limited test cases. Further development and tests on hardware are still to be done.
It is recommended to use Ubuntu 16.04 since all the tests have been conducted on it.
Make sure to install gazebo-8 instead of gazebo-7 since visualization messages are not supported before gazebo-8
Users should first setup OSRF keys and install Gazebo 8 by executing
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list' wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add - sudo apt update sudo apt install libgazebo8-dev
We will also use ros sources for installing other dependencies. To do that use the following commands
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 sudo apt update
ROS users can also install Gazebo 8 with ROS support after adding OSRF keys and using ros-kinetic-gazebo8-* packages
Follow the steps here to install ardupilot_gazebo https://github.com/swiftgust/ardupilot_gazebo
octomap
sudo apt install liboctomap-dev
mavlink
sudo apt install ros-kinetic-mavlink
OMPL
sudo apt install ros-kinetic-ompl
fcl
git clone https://github.com/danfis/libccd cd libccd mkdir build && cd build cmake -G "Unix Makefiles" -DBUILD_SHARED_LIBS=ON .. make && sudo make install git clone https://github.com/flexible-collision-library/fcl cd fcl mkdir build cd build cmake .. sudo make install
Finally, build OctomapPlanner and copy the iris model and grass model for gazebo to find
git clone https://github.com/ardupilot/OctomapPlanner cd OctomapPlanner mkdir build cd build cmake .. make cp -r ../models/* ~/.gazebo/models/
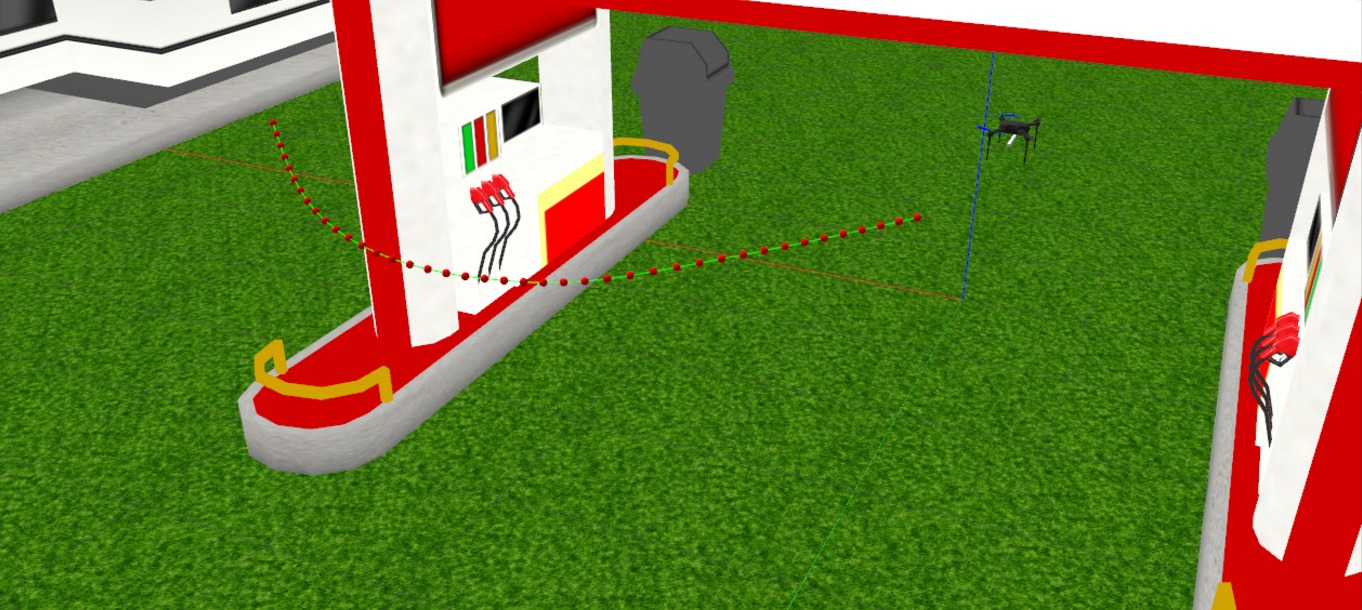
Launch Gazebo with a demo world by executing
gazebo --verbose worlds/iris_gas_station_demo.world
On a seperate terminal start ArduCopter SITL
sim_vehicle.py -v ArduCopter -f gazebo-iris
Switch the copter to guided mode and takeoff using the following commands
mode guided arm throttle takeoff 1 (or any other hight in metres)
Before launching the code you may want to edit a few parameters like start and goal location This can be done by editing the planner_params.yaml file inside the config folder
Finally, launch the planner code by executing this from the OctomapPlanner root folder
./build/main_node
GSoC 2018: Realtime Mapping and Planning for Collision Avoidance
GSoC 2018: Realtime Mapping and Planning for Collision Avoidance: Part 2