This project is for the igdtu data science hackathon 2020
Main objective is two things : Lane detection and object recognition.
Lane detection is done through two methods:
- OpenCV houghes transformation
- Using CNN
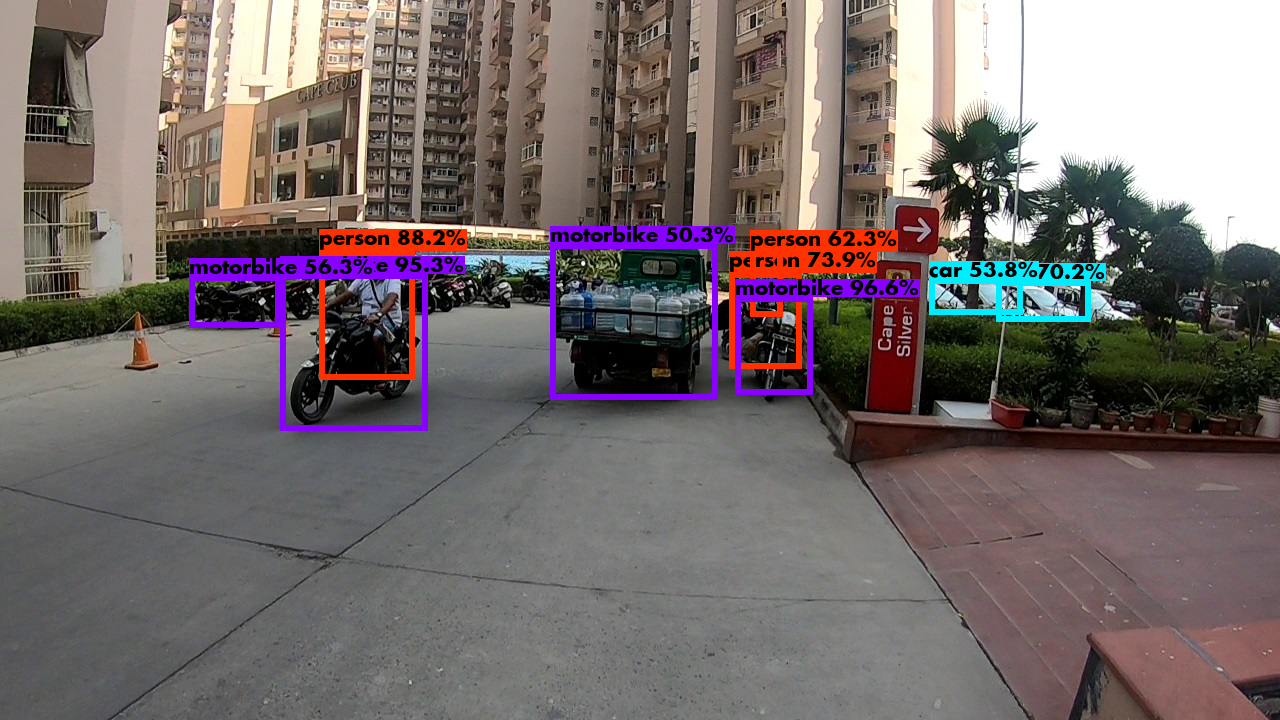
Object detection is done through a standard implementation of the YOLO algorithm.
- Used openCV for producing a lane detector. Inherent techniques used were Canny detection and Hough transforms.
- Used Convolutional Neural Networks to work upon the limitations of the openCV model.
- Used the standard YOLO algorithm for the implementation of the object detectors.
You can view harshit's repo to know more.
- Used a custom built openCV app to label frames of the dataset (a valid lane to go through)
- Made a sequential CNN that learns the dataset
- Predicts a valid path and direction to go.
- Implemented the YOLO algorithm to detect object on the streets
- Detected various class of objects ranging from people , car and animals
- Used a very deep Darknet-53 model to predict the same
- OpenCV lane detection :
Run the ipynb in colab
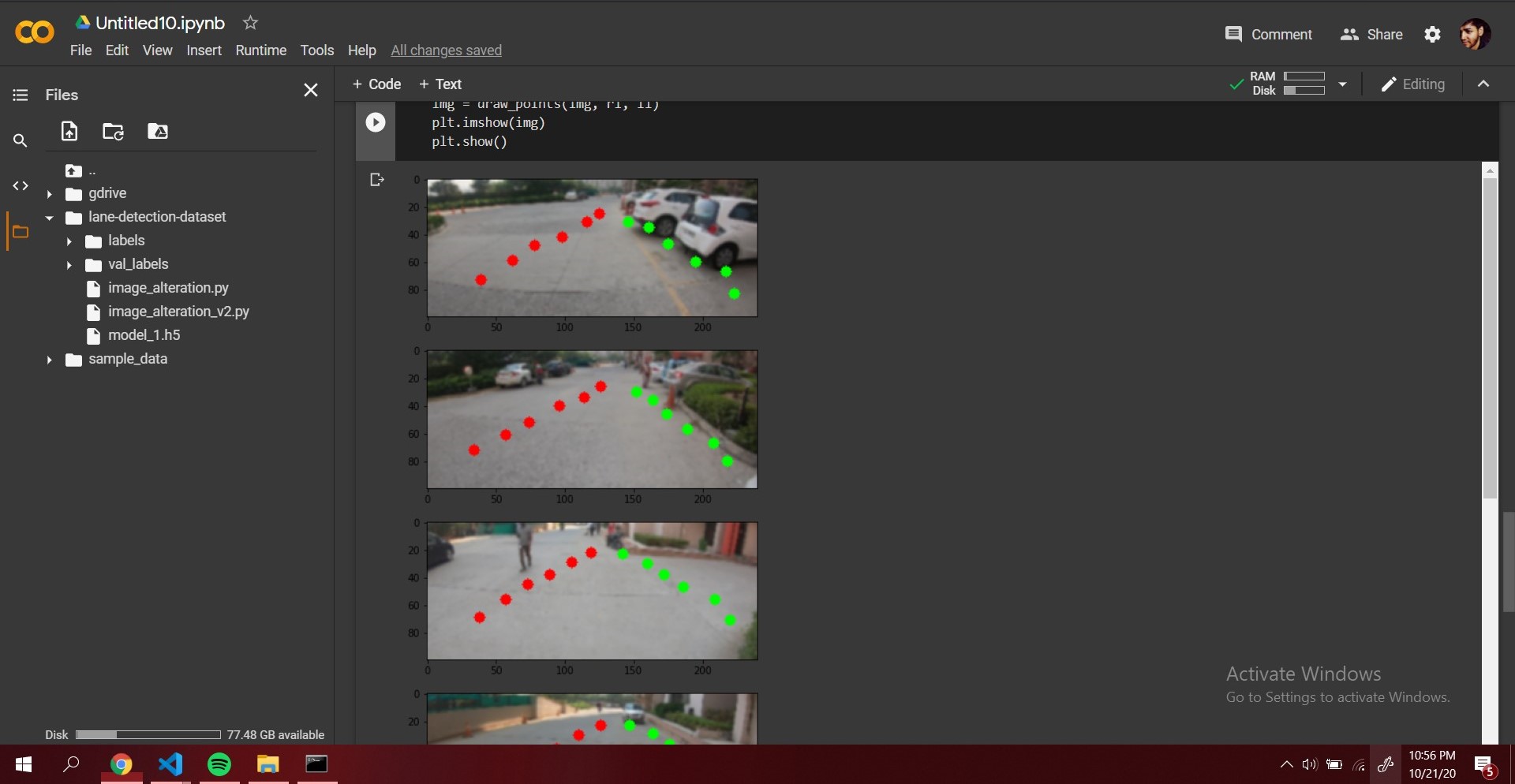
- CNN lane detection :
Add validation values from dataset_labeller/val_labels to your google drive
run Untitled10.py in google colab
Remember to upload model_1.h5 to your runspace (can be found in the respective folder)
- YOLO implementation
Download weights from here
Add images to your gdrive/val2017/
Add weights and everything in the files folder to your gdrive/files/
Run the ipynb in google colab