运行环境为Ubuntu20.04 + ROS Noetic
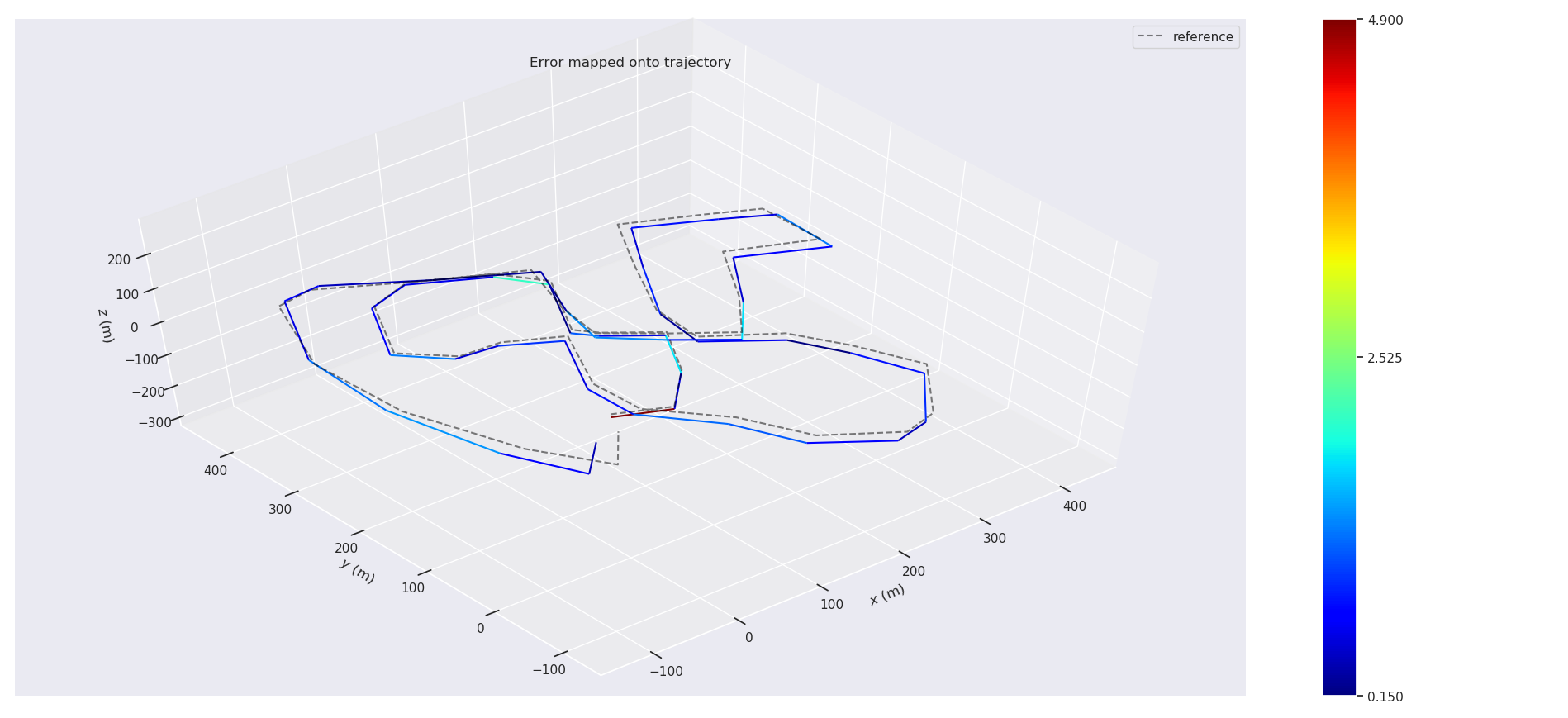
- 分段误差
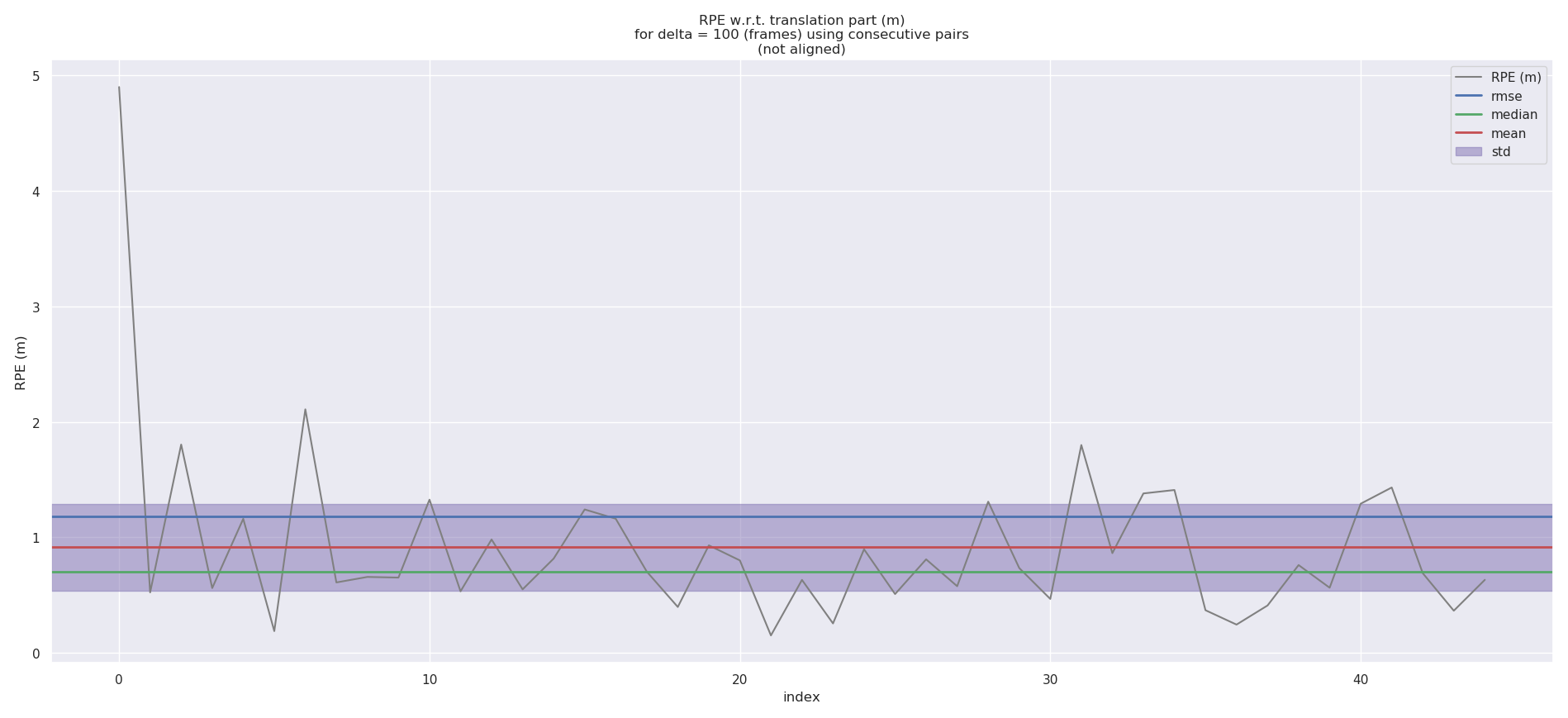
RPE w.r.t. translation part (m)
for delta = 100 (frames) using consecutive pairs
(not aligned)
max 4.900111
mean 0.913785
median 0.702743
min 0.149742
rmse 1.180903
sse 62.753922
std 0.748016
- 整体误差
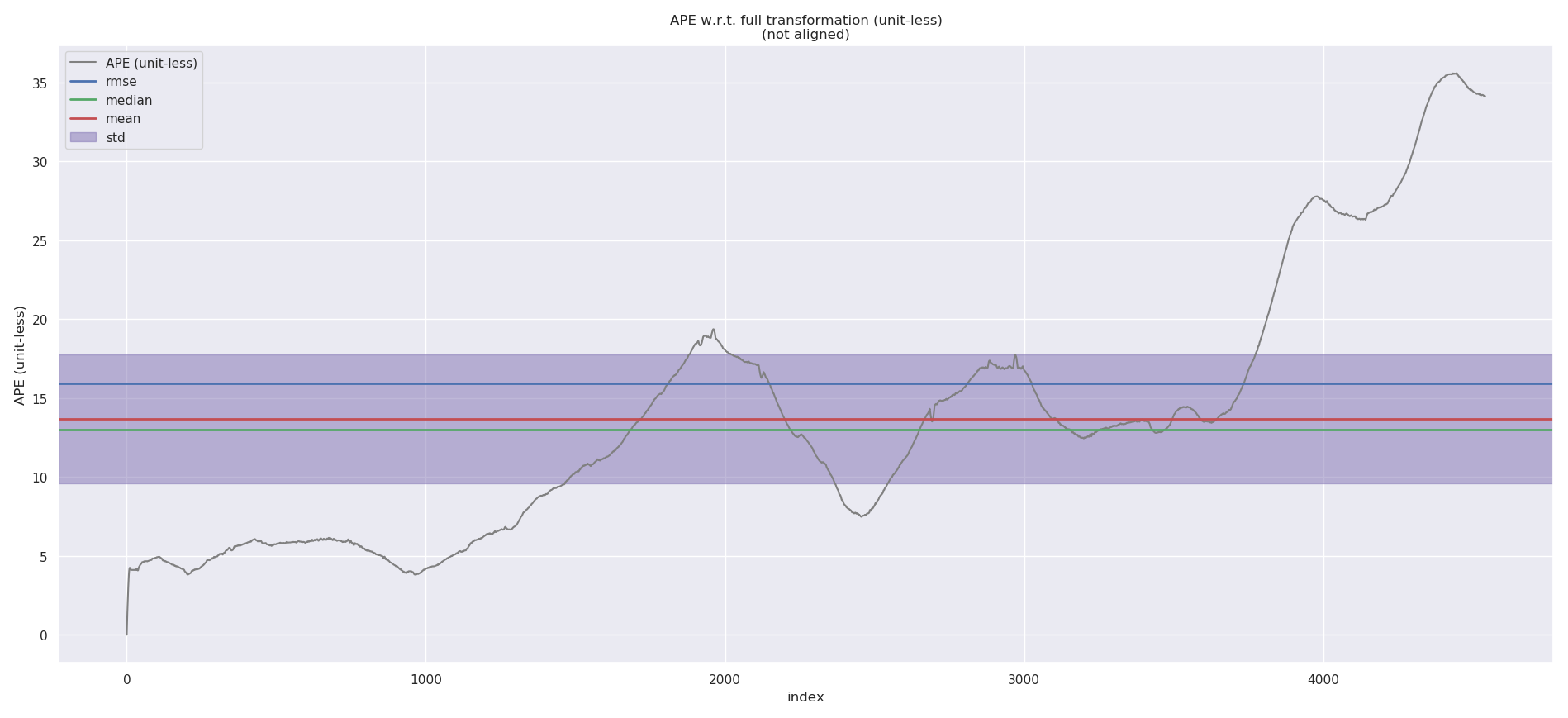
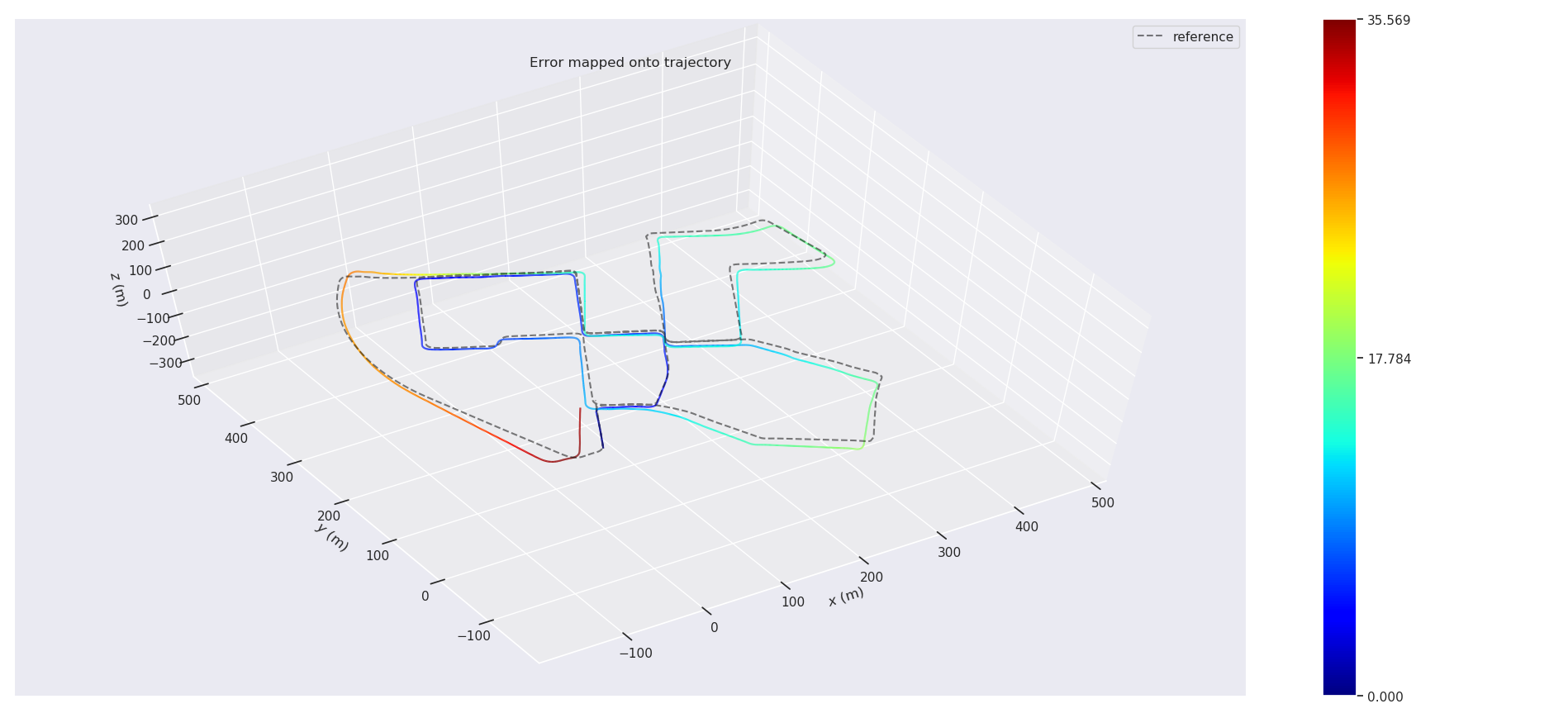
APE w.r.t. full transformation (unit-less)
(not aligned)
max 35.568587
mean 13.661834
median 13.013886
min 0.000001
rmse 15.913199
sse 1150423.514716
std 8.159915
- ICP分段误差
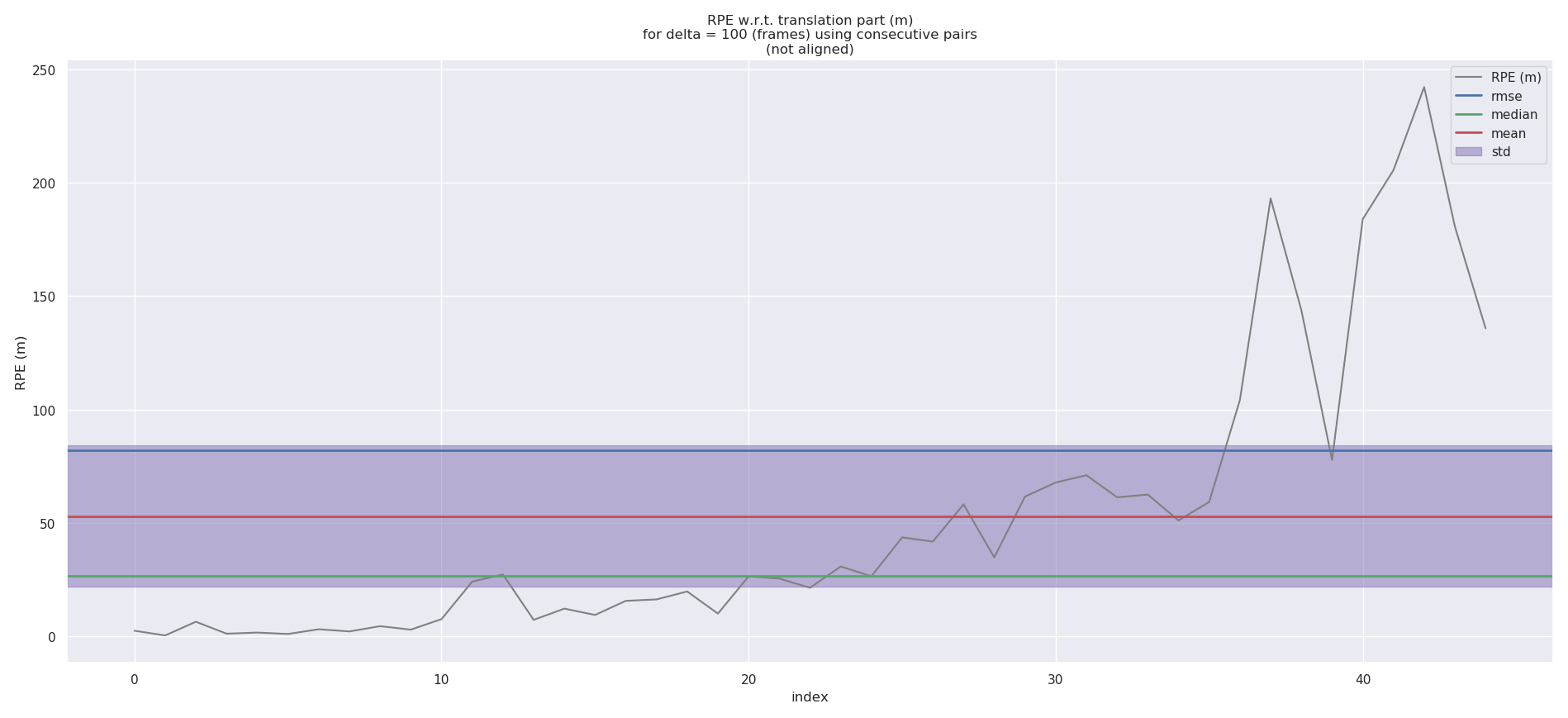
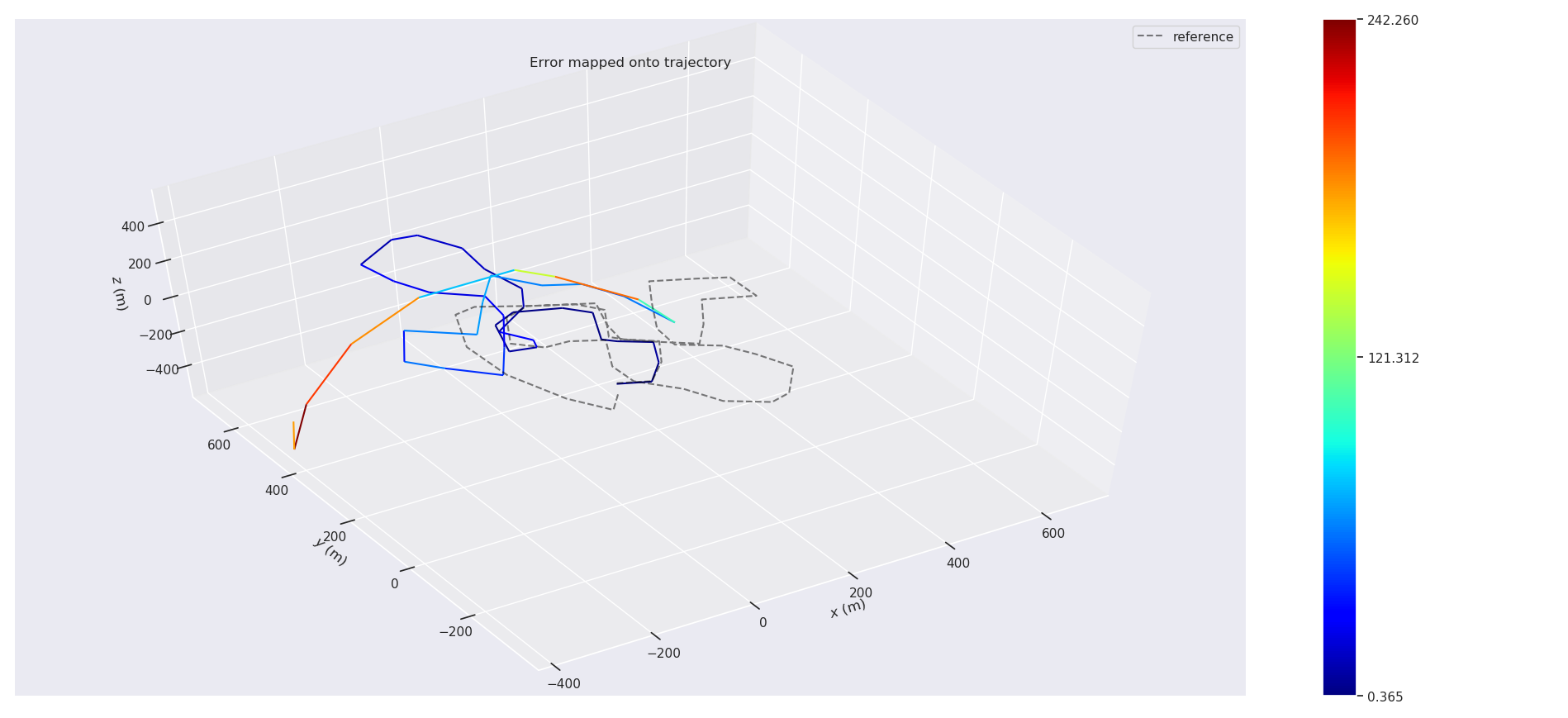
RPE w.r.t. translation part (m)
for delta = 100 (frames) using consecutive pairs
(not aligned)
max 242.260045
mean 53.016540
median 26.477208
min 0.364602
rmse 81.991107
sse 302514.373924
std 62.544289
- ICP整体误差

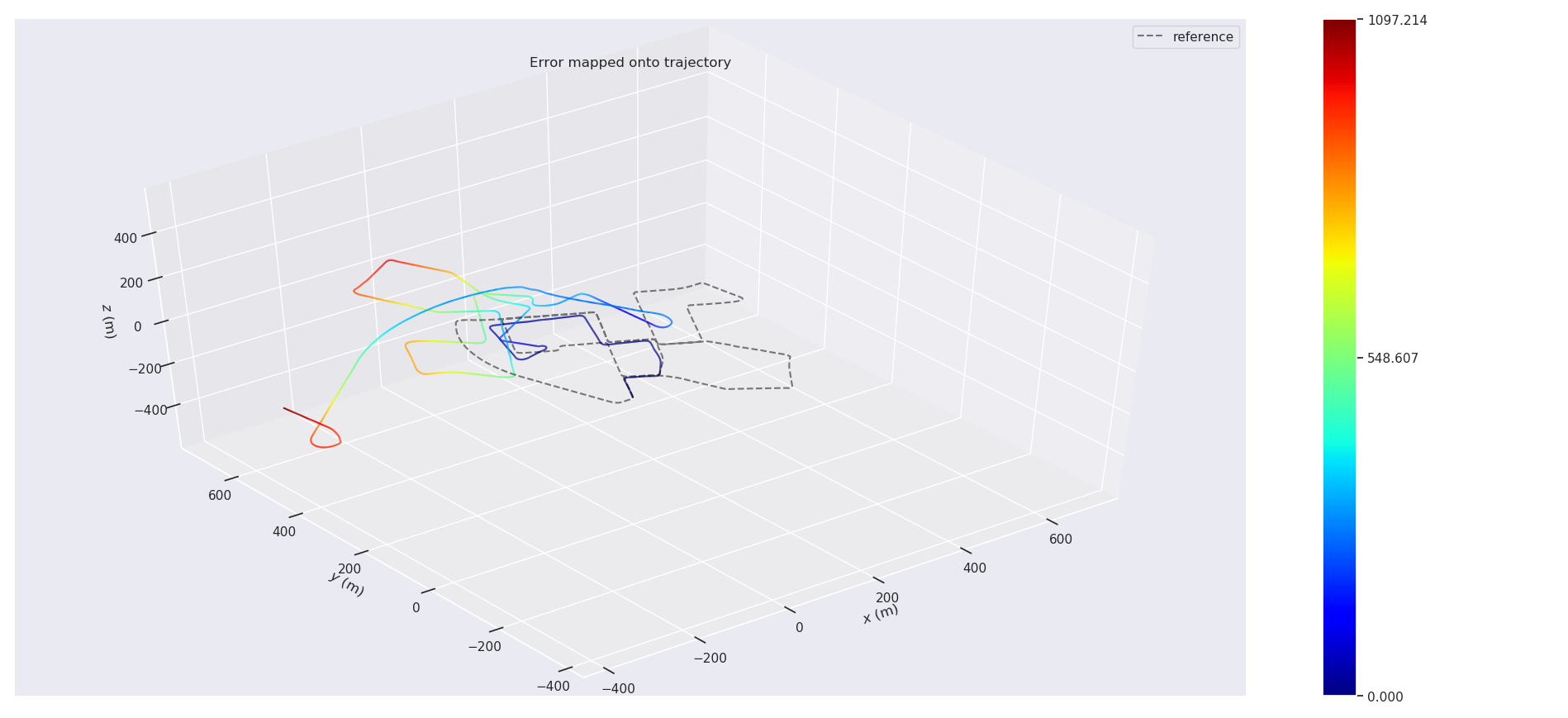
APE w.r.t. full transformation (unit-less)
(not aligned)
max 1097.214374
mean 391.479743
median 333.652511
min 0.000001
rmse 506.708539
sse 1166431348.516783
std 321.709737
- 分段误差
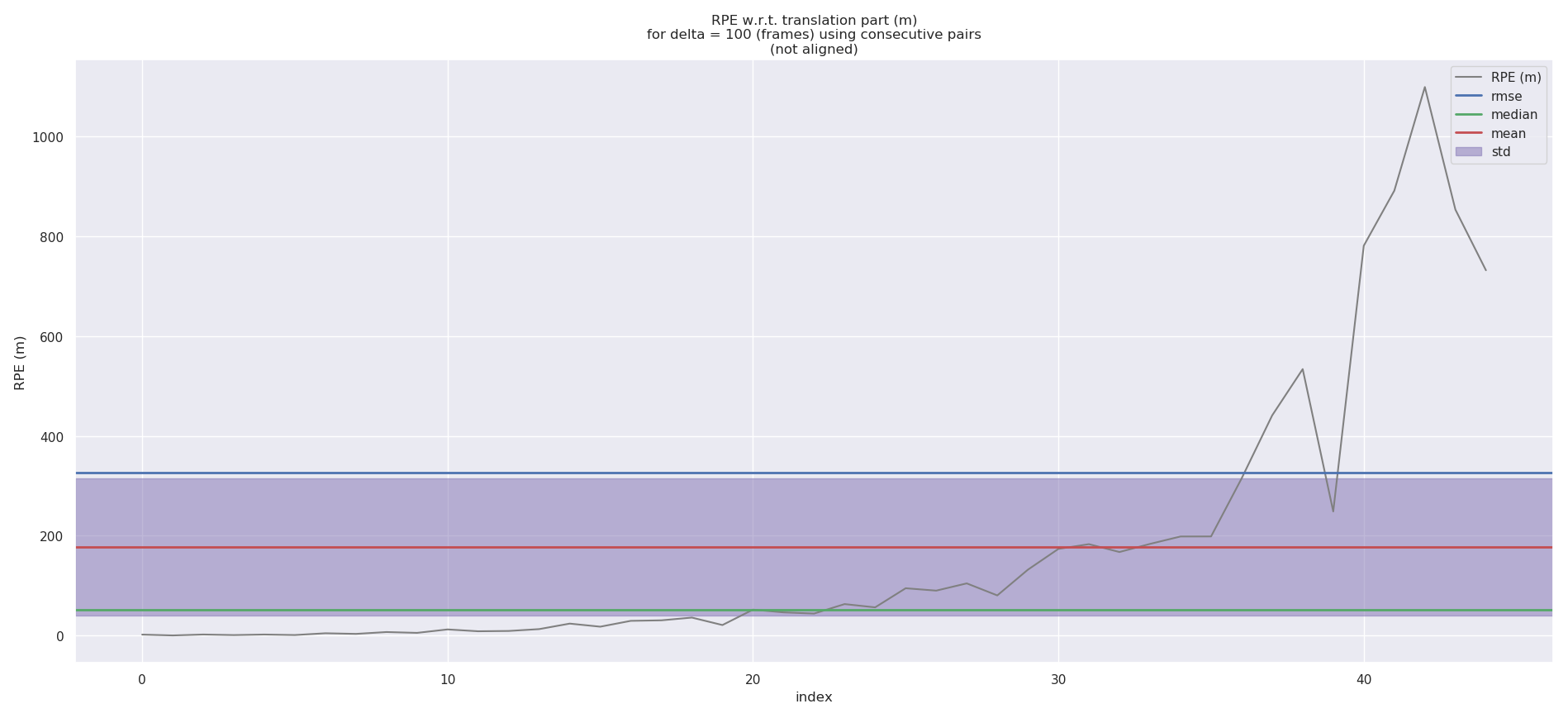
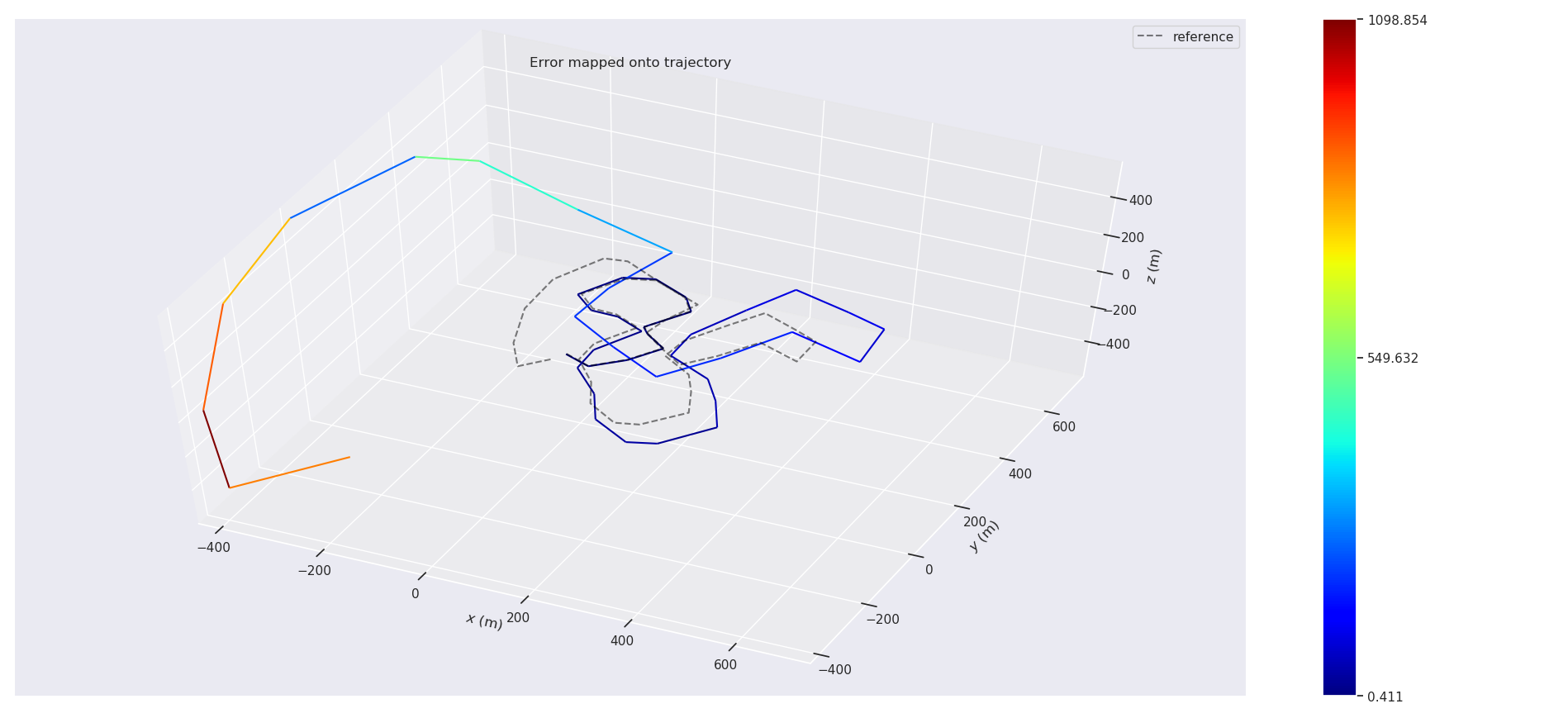
RPE w.r.t. translation part (m)
for delta = 100 (frames) using consecutive pairs
(not aligned)
max 1098.853797
mean 177.749155
median 52.085394
min 0.410623
rmse 326.310045
sse 4791521.060152
std 273.648467
- 整体误差
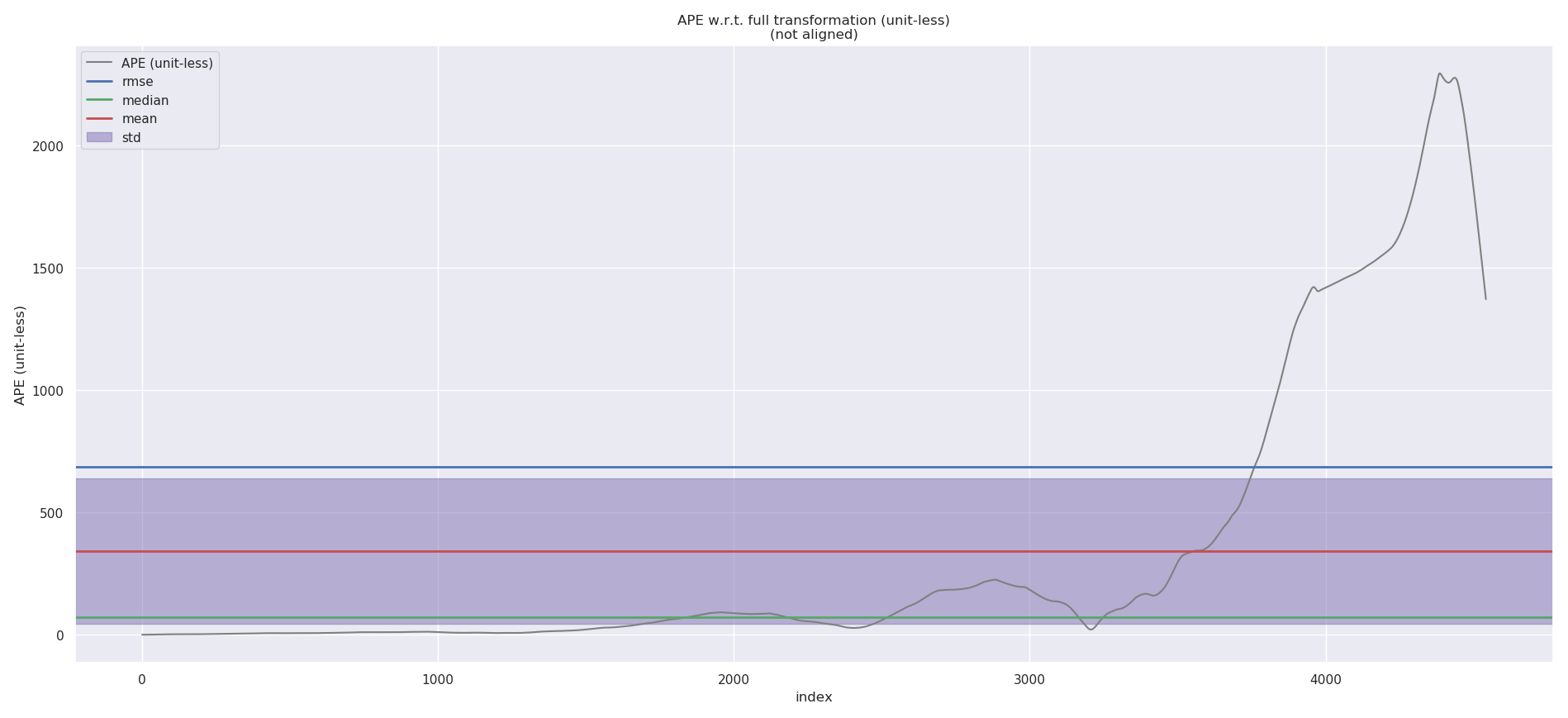
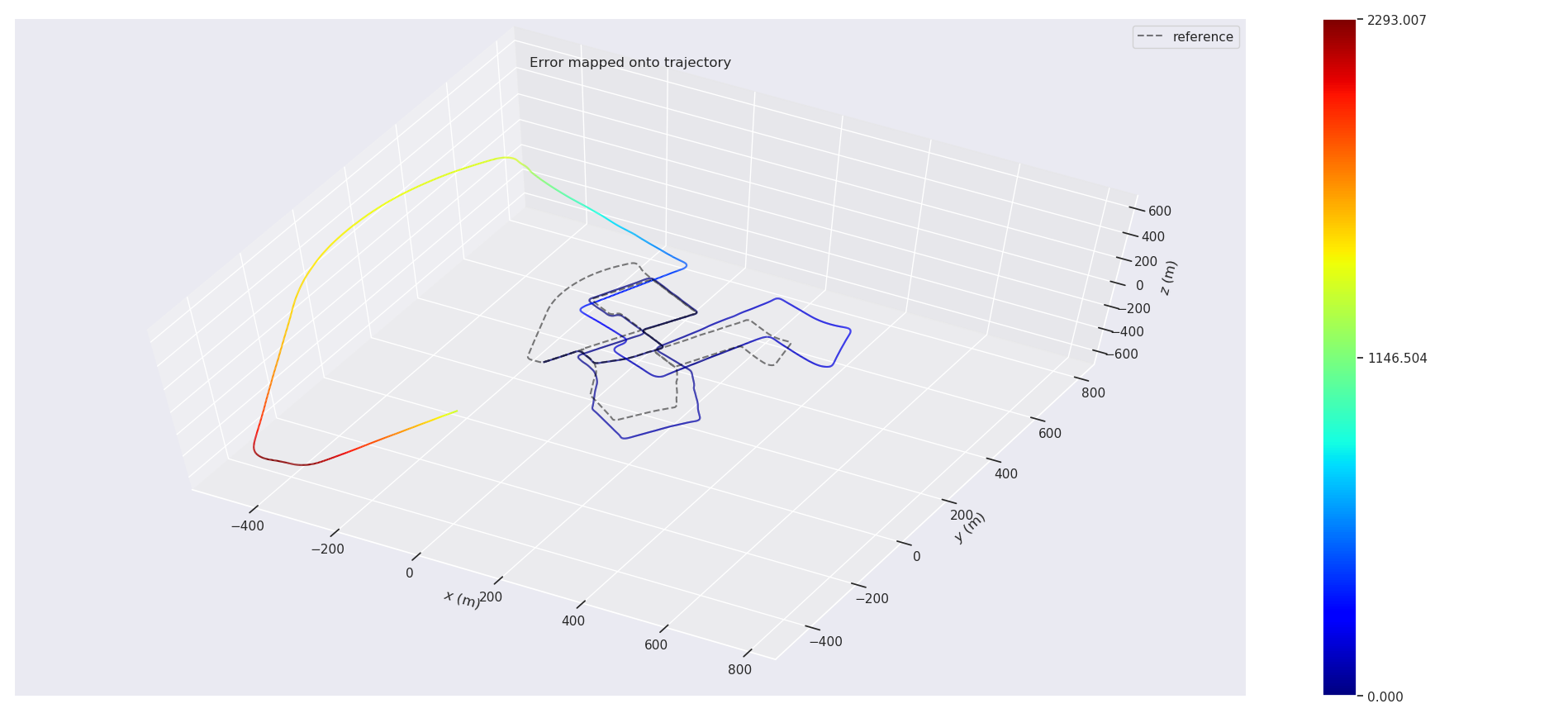
APE w.r.t. full transformation (unit-less)
(not aligned)
max 2293.007124
mean 343.125106
median 71.965393
min 0.000001
rmse 685.504169
sse 2134828233.712260
std 593.448505
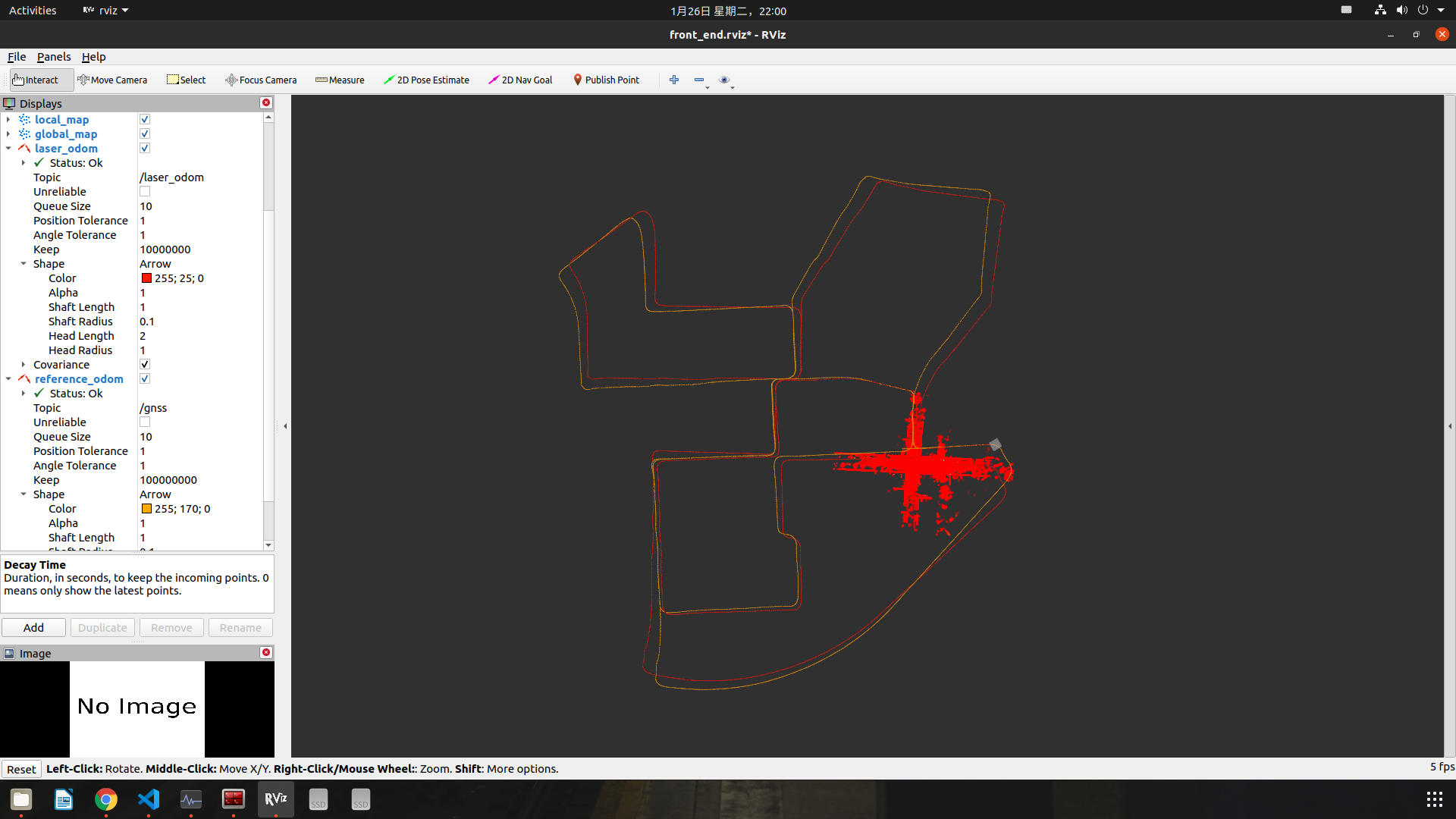
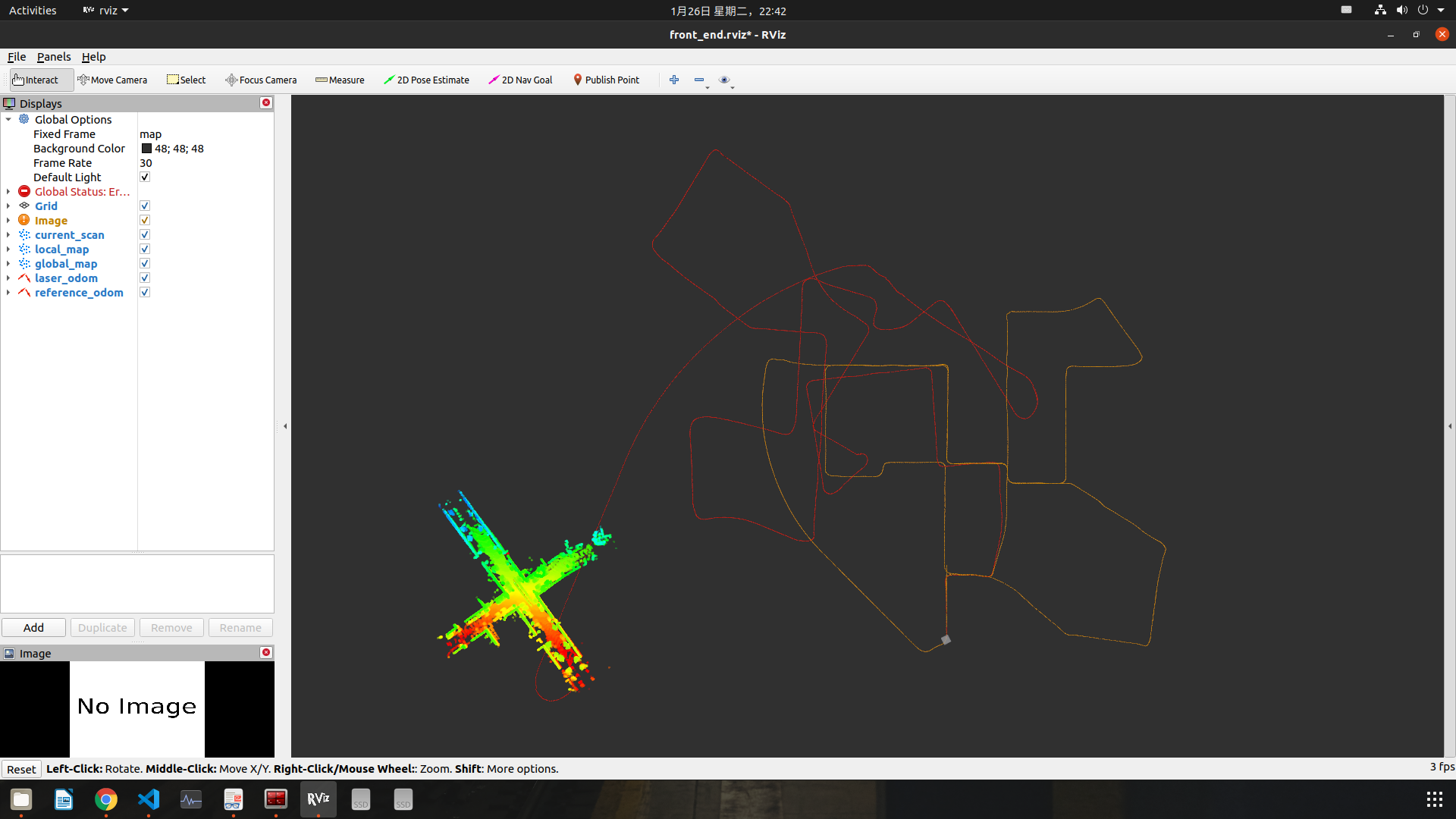
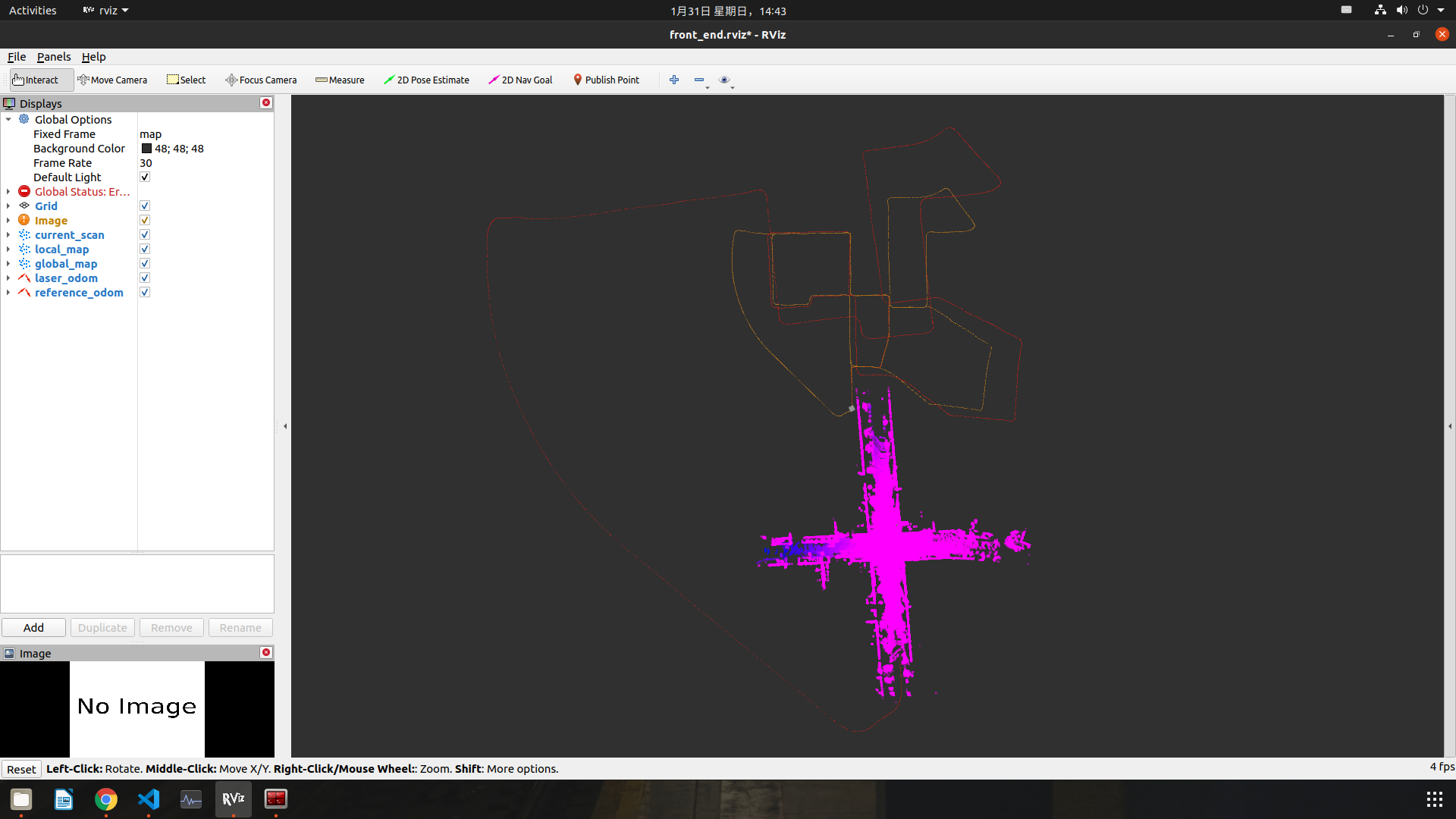
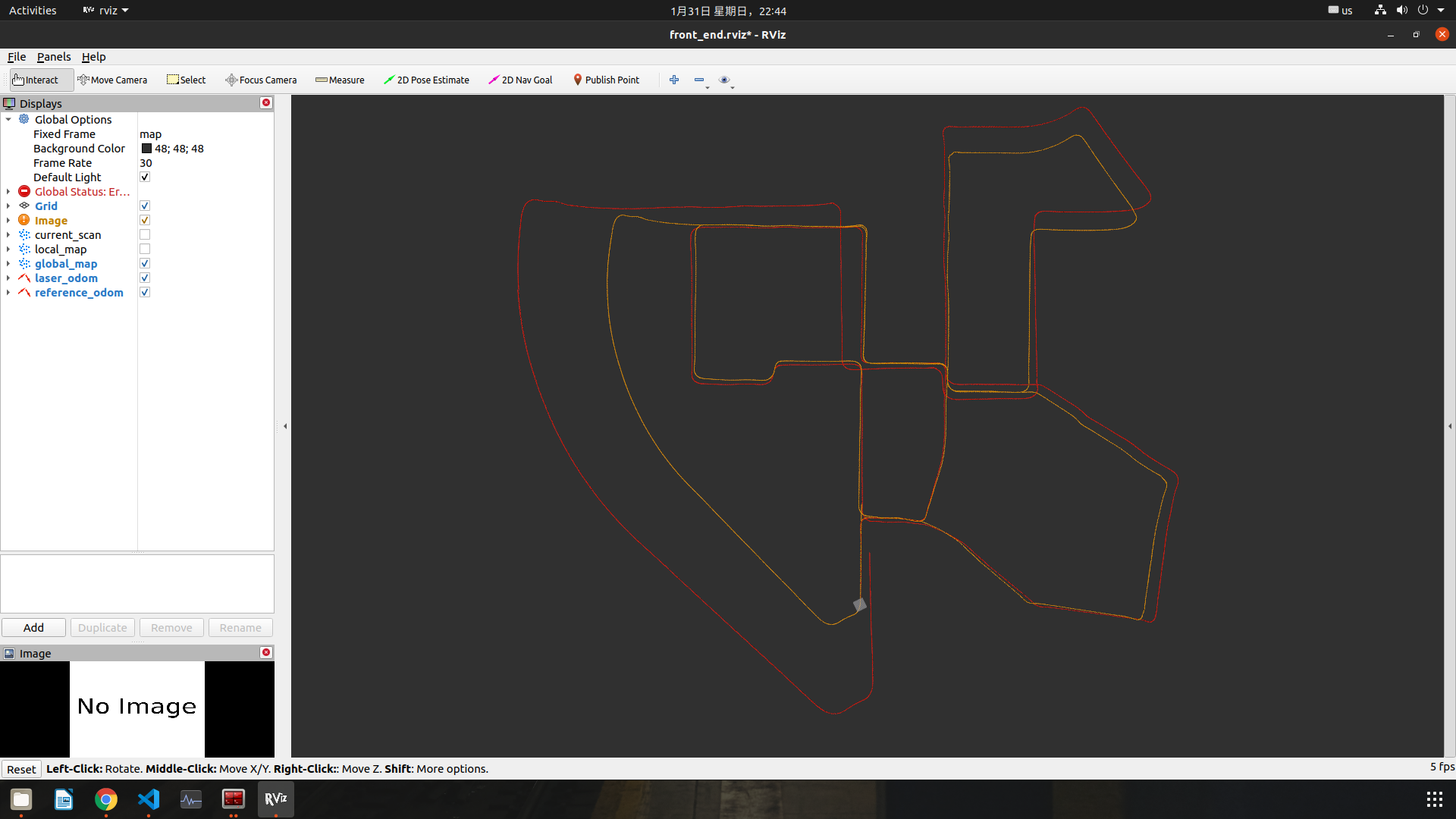
- 运行截图
- 分段误差
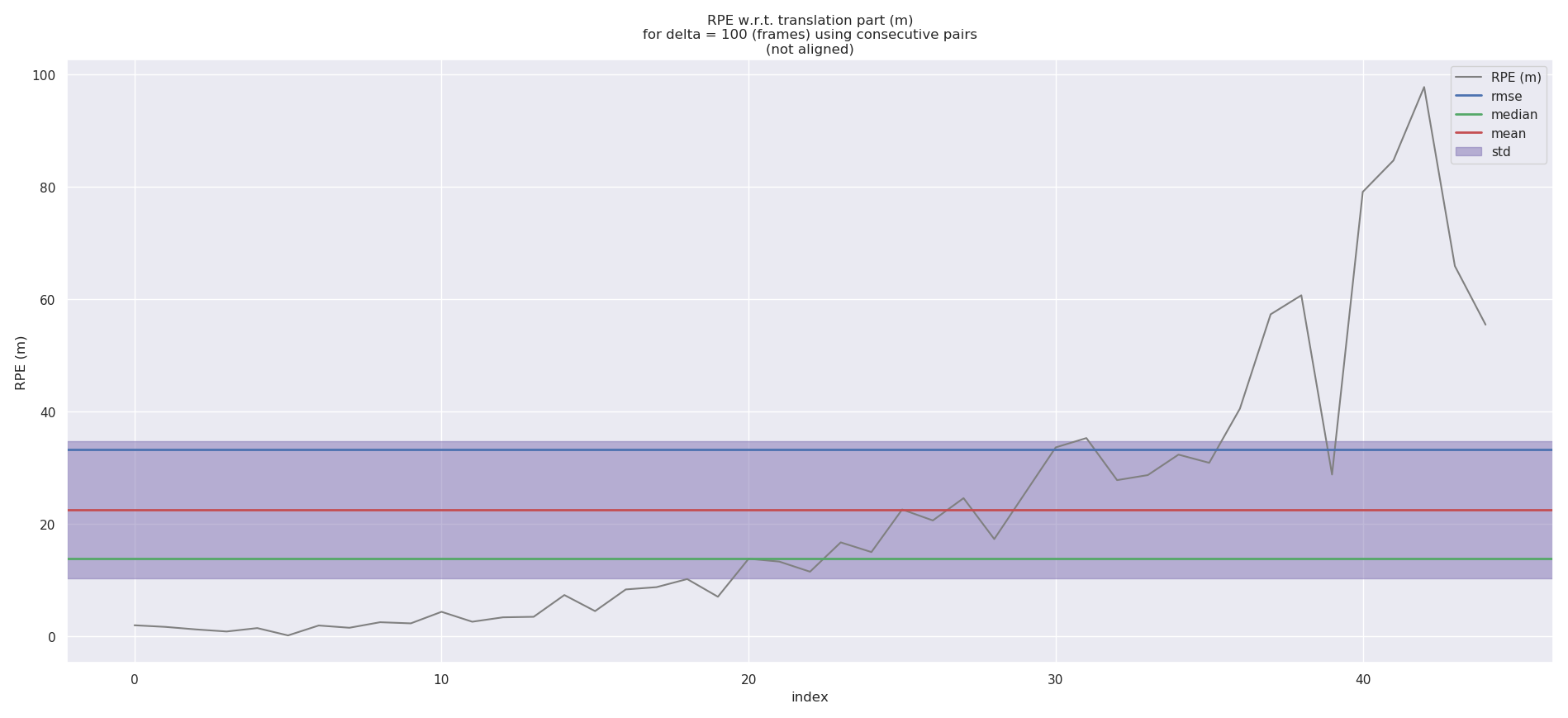
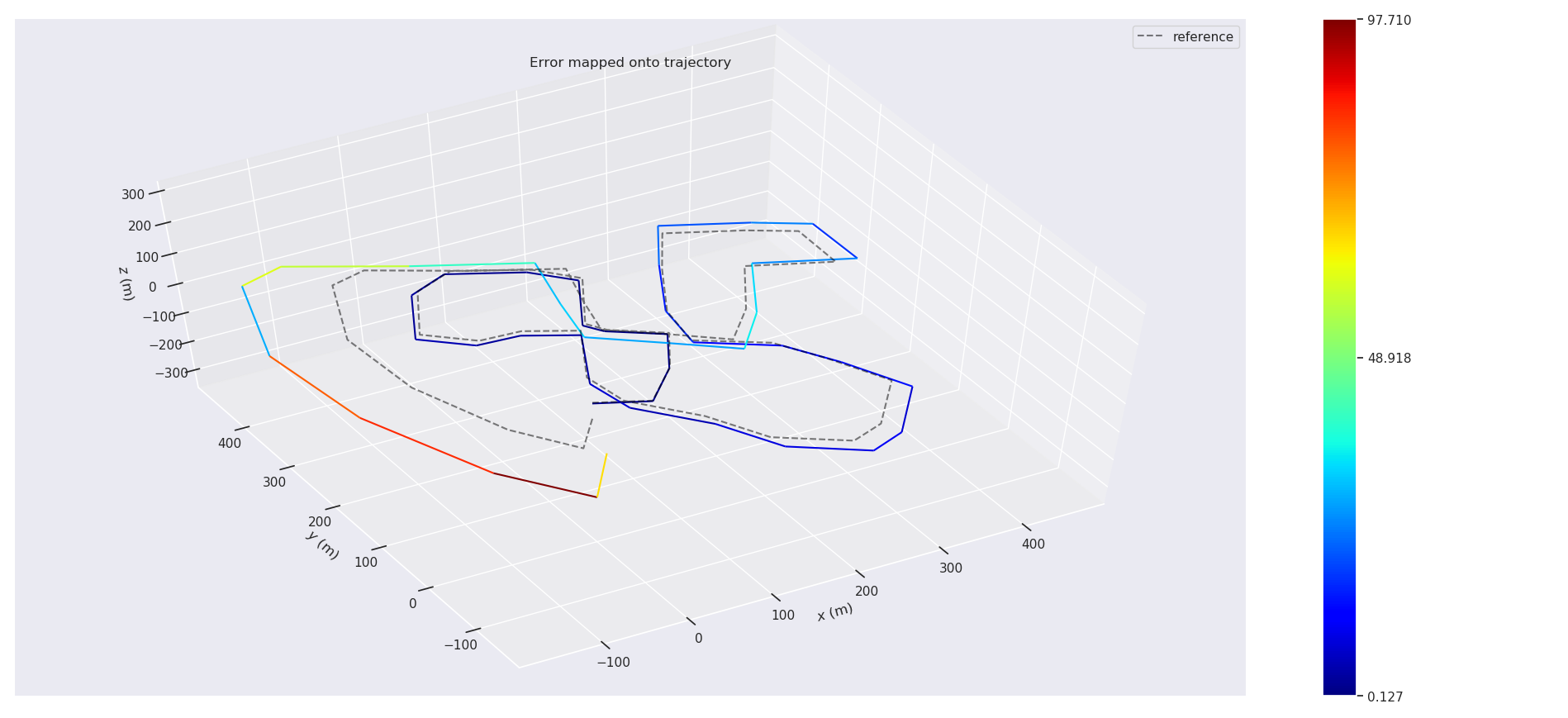
RPE w.r.t. translation part (m)
for delta = 100 (frames) using consecutive pairs
(not aligned)
max 97.709731
mean 22.526664
median 13.769346
min 0.126752
rmse 33.224903
sse 49675.239105
std 24.422195
- 整体误差
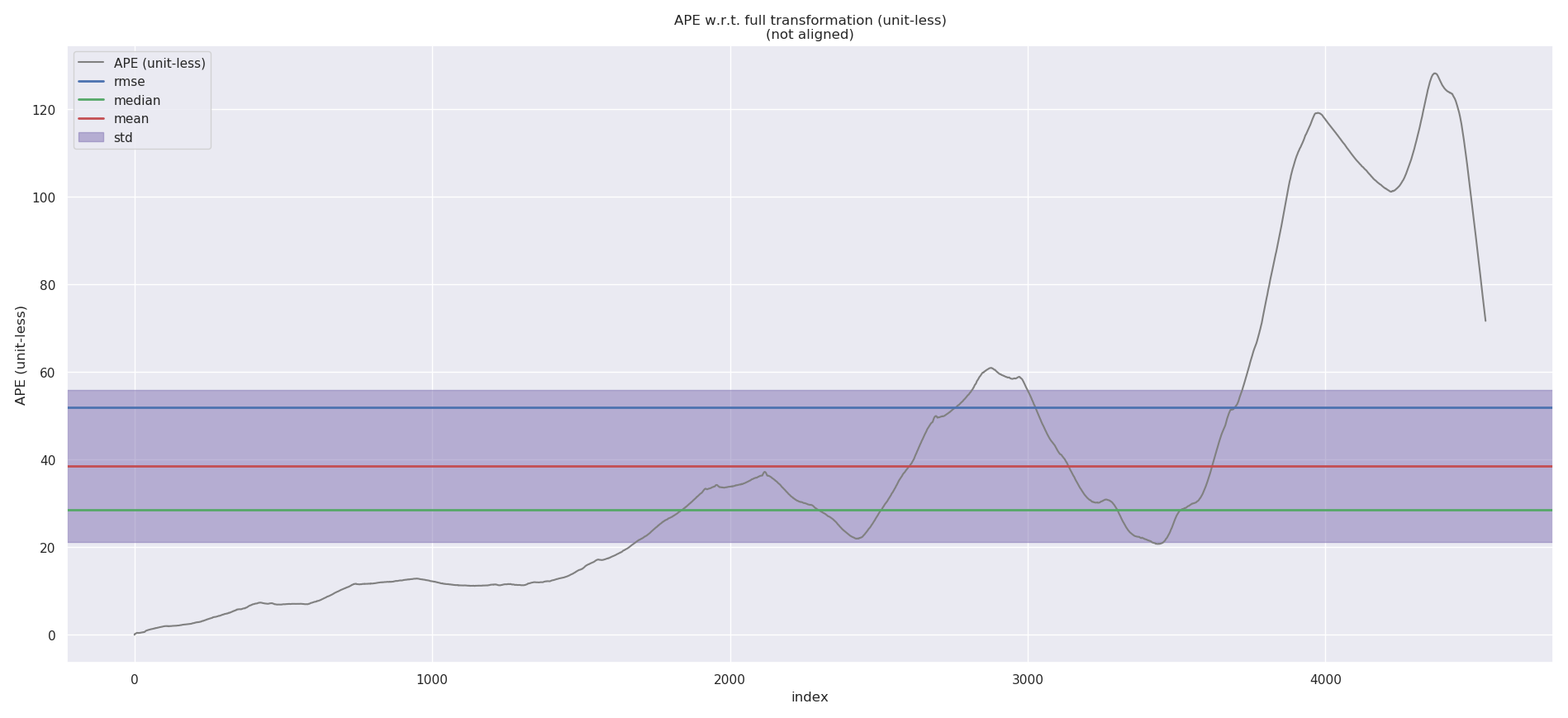
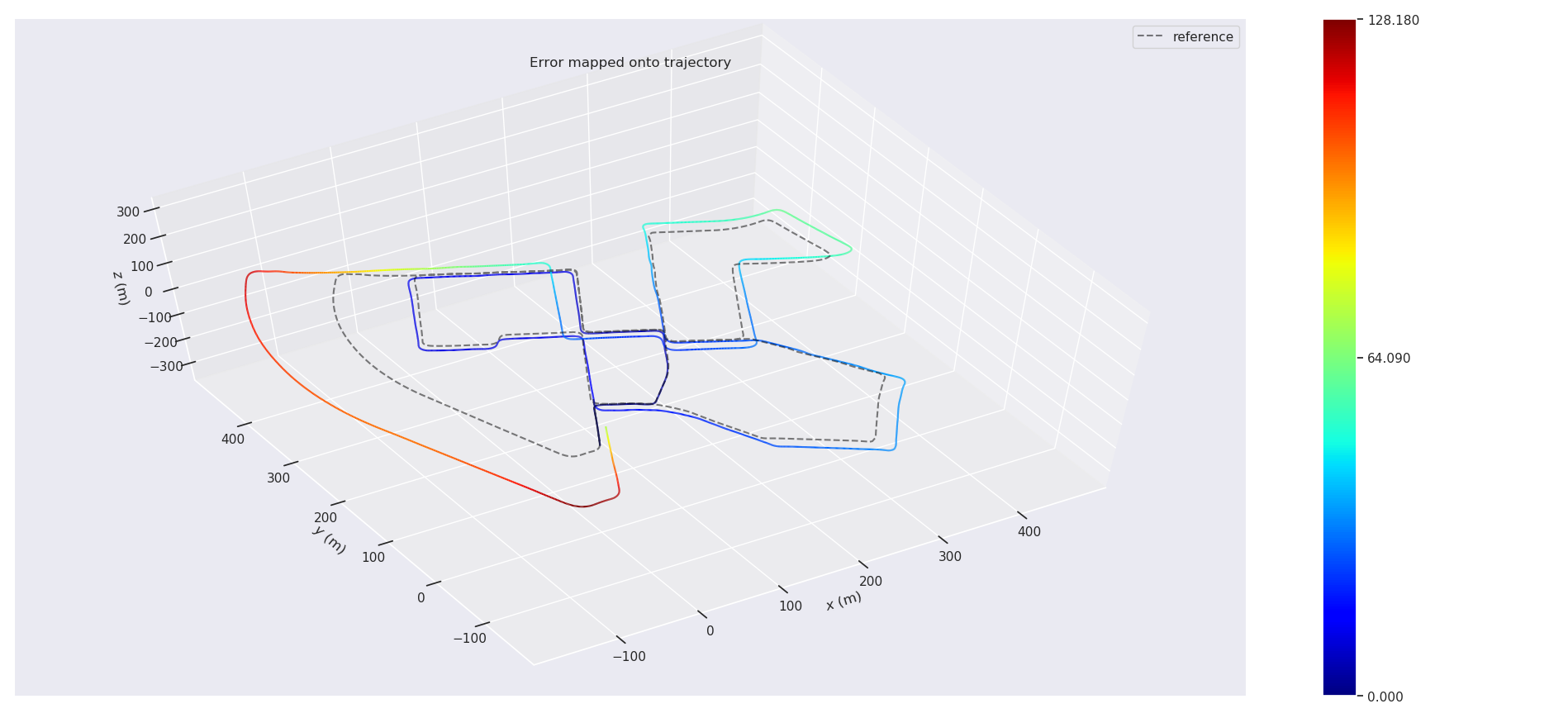
APE w.r.t. full transformation (unit-less)
(not aligned)
max 128.180486
mean 38.566743
median 28.547089
min 0.000002
rmse 51.926611
sse 12238836.862241
std 34.770380
综上可以看出,在没有闭环检测的情况下,无论是NDT,还是ICP激光里程计都会发生漂移,而且Z方向漂移都很大(因为在平面运动,有退化现象?),从效果上来看NDT > GN-ICP > SVD-ICP。