-
-  -
-
- -[English](../README.md) | 简体中文 -
-  -
-  -
-  -
-
- -
-  -
-  -
-
-
-
- -
- -
-YOLOv5🚀是一个在COCO数据集上预训练的物体检测架构和模型系列,它代表了Ultralytics对未来视觉AI方法的公开研究,其中包含了在数千小时的研究和开发中所获得的经验和最佳实践。 -
- - - - - -
-
-
-
-
- -YOLOv5🚀是一个在COCO数据集上预训练的物体检测架构和模型系列,它代表了Ultralytics对未来视觉AI方法的公开研究,其中包含了在数千小时的研究和开发中所获得的经验和最佳实践。 -
- - - - - - -
-
-
-
 -
-##
+ - **Notebooks** with free GPU:
- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status
-
-
-##
+ - **Notebooks** with free GPU:
- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status
- 

-
-
-
-
-
+
+  +
+
+
+ -YOLOv5 🚀 is a family of object detection architectures and models pretrained on the COCO dataset, and represents Ultralytics - open-source research into future vision AI methods, incorporating lessons learned and best practices evolved over thousands of hours of research and development. -
+ +##
 @@ -147,79 +225,68 @@ python train.py --data coco.yaml --cfg yolov5n.yaml --weights '' --batch-size 12
- [Multi-GPU Training](https://github.com/ultralytics/yolov5/issues/475)
- [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36) 🌟 NEW
- [TFLite, ONNX, CoreML, TensorRT Export](https://github.com/ultralytics/yolov5/issues/251) 🚀
+- [NVIDIA Jetson Nano Deployment](https://github.com/ultralytics/yolov5/issues/9627) 🌟 NEW
- [Test-Time Augmentation (TTA)](https://github.com/ultralytics/yolov5/issues/303)
- [Model Ensembling](https://github.com/ultralytics/yolov5/issues/318)
- [Model Pruning/Sparsity](https://github.com/ultralytics/yolov5/issues/304)
- [Hyperparameter Evolution](https://github.com/ultralytics/yolov5/issues/607)
- [Transfer Learning with Frozen Layers](https://github.com/ultralytics/yolov5/issues/1314)
- [Architecture Summary](https://github.com/ultralytics/yolov5/issues/6998) 🌟 NEW
-- [Weights & Biases Logging](https://github.com/ultralytics/yolov5/issues/1289)
- [Roboflow for Datasets, Labeling, and Active Learning](https://github.com/ultralytics/yolov5/issues/4975) 🌟 NEW
- [ClearML Logging](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/clearml) 🌟 NEW
- [Deci Platform](https://github.com/ultralytics/yolov5/wiki/Deci-Platform) 🌟 NEW
+- [Comet Logging](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/comet) 🌟 NEW
@@ -147,79 +225,68 @@ python train.py --data coco.yaml --cfg yolov5n.yaml --weights '' --batch-size 12
- [Multi-GPU Training](https://github.com/ultralytics/yolov5/issues/475)
- [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36) 🌟 NEW
- [TFLite, ONNX, CoreML, TensorRT Export](https://github.com/ultralytics/yolov5/issues/251) 🚀
+- [NVIDIA Jetson Nano Deployment](https://github.com/ultralytics/yolov5/issues/9627) 🌟 NEW
- [Test-Time Augmentation (TTA)](https://github.com/ultralytics/yolov5/issues/303)
- [Model Ensembling](https://github.com/ultralytics/yolov5/issues/318)
- [Model Pruning/Sparsity](https://github.com/ultralytics/yolov5/issues/304)
- [Hyperparameter Evolution](https://github.com/ultralytics/yolov5/issues/607)
- [Transfer Learning with Frozen Layers](https://github.com/ultralytics/yolov5/issues/1314)
- [Architecture Summary](https://github.com/ultralytics/yolov5/issues/6998) 🌟 NEW
-- [Weights & Biases Logging](https://github.com/ultralytics/yolov5/issues/1289)
- [Roboflow for Datasets, Labeling, and Active Learning](https://github.com/ultralytics/yolov5/issues/4975) 🌟 NEW
- [ClearML Logging](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/clearml) 🌟 NEW
- [Deci Platform](https://github.com/ultralytics/yolov5/wiki/Deci-Platform) 🌟 NEW
+- [Comet Logging](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/comet) 🌟 NEW
 +
+
 +
+
##
+
+##
+
+
##
+
+##
+
+
+
+
+
+
+
+
+
+ +
+##
+
+##
+
+##
+
+##  \n",
+ "\n",
+ "\n",
+ "
\n",
+ "\n",
+ "\n",
+ " \n",
+ "
\n",
+ " "
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "0eq1SMWl6Sfn"
+ },
+ "source": [
+ "# 2. Validate\n",
+ "Validate a model's accuracy on the [Imagenet](https://image-net.org/) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "WQPtK1QYVaD_",
+ "outputId": "20fc0630-141e-4a90-ea06-342cbd7ce496"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "--2022-11-22 19:53:40-- https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar\n",
+ "Resolving image-net.org (image-net.org)... 171.64.68.16\n",
+ "Connecting to image-net.org (image-net.org)|171.64.68.16|:443... connected.\n",
+ "HTTP request sent, awaiting response... 200 OK\n",
+ "Length: 6744924160 (6.3G) [application/x-tar]\n",
+ "Saving to: ‘ILSVRC2012_img_val.tar’\n",
+ "\n",
+ "ILSVRC2012_img_val. 100%[===================>] 6.28G 16.1MB/s in 10m 52s \n",
+ "\n",
+ "2022-11-22 20:04:32 (9.87 MB/s) - ‘ILSVRC2012_img_val.tar’ saved [6744924160/6744924160]\n",
+ "\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Download Imagenet val (6.3G, 50000 images)\n",
+ "!bash data/scripts/get_imagenet.sh --val"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "X58w8JLpMnjH",
+ "outputId": "41843132-98e2-4c25-d474-4cd7b246fb8e"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "\u001b[34m\u001b[1mclassify/val: \u001b[0mdata=../datasets/imagenet, weights=['yolov5s-cls.pt'], batch_size=128, imgsz=224, device=, workers=8, verbose=True, project=runs/val-cls, name=exp, exist_ok=False, half=True, dnn=False\n",
+ "YOLOv5 🚀 v7.0-3-g61ebf5e Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
+ "\n",
+ "Fusing layers... \n",
+ "Model summary: 117 layers, 5447688 parameters, 0 gradients, 11.4 GFLOPs\n",
+ "validating: 100% 391/391 [04:57<00:00, 1.31it/s]\n",
+ " Class Images top1_acc top5_acc\n",
+ " all 50000 0.715 0.902\n",
+ " tench 50 0.94 0.98\n",
+ " goldfish 50 0.88 0.92\n",
+ " great white shark 50 0.78 0.96\n",
+ " tiger shark 50 0.68 0.96\n",
+ " hammerhead shark 50 0.82 0.92\n",
+ " electric ray 50 0.76 0.9\n",
+ " stingray 50 0.7 0.9\n",
+ " cock 50 0.78 0.92\n",
+ " hen 50 0.84 0.96\n",
+ " ostrich 50 0.98 1\n",
+ " brambling 50 0.9 0.96\n",
+ " goldfinch 50 0.92 0.98\n",
+ " house finch 50 0.88 0.96\n",
+ " junco 50 0.94 0.98\n",
+ " indigo bunting 50 0.86 0.88\n",
+ " American robin 50 0.9 0.96\n",
+ " bulbul 50 0.84 0.96\n",
+ " jay 50 0.9 0.96\n",
+ " magpie 50 0.84 0.96\n",
+ " chickadee 50 0.9 1\n",
+ " American dipper 50 0.82 0.92\n",
+ " kite 50 0.76 0.94\n",
+ " bald eagle 50 0.92 1\n",
+ " vulture 50 0.96 1\n",
+ " great grey owl 50 0.94 0.98\n",
+ " fire salamander 50 0.96 0.98\n",
+ " smooth newt 50 0.58 0.94\n",
+ " newt 50 0.74 0.9\n",
+ " spotted salamander 50 0.86 0.94\n",
+ " axolotl 50 0.86 0.96\n",
+ " American bullfrog 50 0.78 0.92\n",
+ " tree frog 50 0.84 0.96\n",
+ " tailed frog 50 0.48 0.8\n",
+ " loggerhead sea turtle 50 0.68 0.94\n",
+ " leatherback sea turtle 50 0.5 0.8\n",
+ " mud turtle 50 0.64 0.84\n",
+ " terrapin 50 0.52 0.98\n",
+ " box turtle 50 0.84 0.98\n",
+ " banded gecko 50 0.7 0.88\n",
+ " green iguana 50 0.76 0.94\n",
+ " Carolina anole 50 0.58 0.96\n",
+ "desert grassland whiptail lizard 50 0.82 0.94\n",
+ " agama 50 0.74 0.92\n",
+ " frilled-necked lizard 50 0.84 0.86\n",
+ " alligator lizard 50 0.58 0.78\n",
+ " Gila monster 50 0.72 0.8\n",
+ " European green lizard 50 0.42 0.9\n",
+ " chameleon 50 0.76 0.84\n",
+ " Komodo dragon 50 0.86 0.96\n",
+ " Nile crocodile 50 0.7 0.84\n",
+ " American alligator 50 0.76 0.96\n",
+ " triceratops 50 0.9 0.94\n",
+ " worm snake 50 0.76 0.88\n",
+ " ring-necked snake 50 0.8 0.92\n",
+ " eastern hog-nosed snake 50 0.58 0.88\n",
+ " smooth green snake 50 0.6 0.94\n",
+ " kingsnake 50 0.82 0.9\n",
+ " garter snake 50 0.88 0.94\n",
+ " water snake 50 0.7 0.94\n",
+ " vine snake 50 0.66 0.76\n",
+ " night snake 50 0.34 0.82\n",
+ " boa constrictor 50 0.8 0.96\n",
+ " African rock python 50 0.48 0.76\n",
+ " Indian cobra 50 0.82 0.94\n",
+ " green mamba 50 0.54 0.86\n",
+ " sea snake 50 0.62 0.9\n",
+ " Saharan horned viper 50 0.56 0.86\n",
+ "eastern diamondback rattlesnake 50 0.6 0.86\n",
+ " sidewinder 50 0.28 0.86\n",
+ " trilobite 50 0.98 0.98\n",
+ " harvestman 50 0.86 0.94\n",
+ " scorpion 50 0.86 0.94\n",
+ " yellow garden spider 50 0.92 0.96\n",
+ " barn spider 50 0.38 0.98\n",
+ " European garden spider 50 0.62 0.98\n",
+ " southern black widow 50 0.88 0.94\n",
+ " tarantula 50 0.94 1\n",
+ " wolf spider 50 0.82 0.92\n",
+ " tick 50 0.74 0.84\n",
+ " centipede 50 0.68 0.82\n",
+ " black grouse 50 0.88 0.98\n",
+ " ptarmigan 50 0.78 0.94\n",
+ " ruffed grouse 50 0.88 1\n",
+ " prairie grouse 50 0.92 1\n",
+ " peacock 50 0.88 0.9\n",
+ " quail 50 0.9 0.94\n",
+ " partridge 50 0.74 0.96\n",
+ " grey parrot 50 0.9 0.96\n",
+ " macaw 50 0.88 0.98\n",
+ "sulphur-crested cockatoo 50 0.86 0.92\n",
+ " lorikeet 50 0.96 1\n",
+ " coucal 50 0.82 0.88\n",
+ " bee eater 50 0.96 0.98\n",
+ " hornbill 50 0.9 0.96\n",
+ " hummingbird 50 0.88 0.96\n",
+ " jacamar 50 0.92 0.94\n",
+ " toucan 50 0.84 0.94\n",
+ " duck 50 0.76 0.94\n",
+ " red-breasted merganser 50 0.86 0.96\n",
+ " goose 50 0.74 0.96\n",
+ " black swan 50 0.94 0.98\n",
+ " tusker 50 0.54 0.92\n",
+ " echidna 50 0.98 1\n",
+ " platypus 50 0.72 0.84\n",
+ " wallaby 50 0.78 0.88\n",
+ " koala 50 0.84 0.92\n",
+ " wombat 50 0.78 0.84\n",
+ " jellyfish 50 0.88 0.96\n",
+ " sea anemone 50 0.72 0.9\n",
+ " brain coral 50 0.88 0.96\n",
+ " flatworm 50 0.8 0.98\n",
+ " nematode 50 0.86 0.9\n",
+ " conch 50 0.74 0.88\n",
+ " snail 50 0.78 0.88\n",
+ " slug 50 0.74 0.82\n",
+ " sea slug 50 0.88 0.98\n",
+ " chiton 50 0.88 0.98\n",
+ " chambered nautilus 50 0.88 0.92\n",
+ " Dungeness crab 50 0.78 0.94\n",
+ " rock crab 50 0.68 0.86\n",
+ " fiddler crab 50 0.64 0.86\n",
+ " red king crab 50 0.76 0.96\n",
+ " American lobster 50 0.78 0.96\n",
+ " spiny lobster 50 0.74 0.88\n",
+ " crayfish 50 0.56 0.86\n",
+ " hermit crab 50 0.78 0.96\n",
+ " isopod 50 0.66 0.78\n",
+ " white stork 50 0.88 0.96\n",
+ " black stork 50 0.84 0.98\n",
+ " spoonbill 50 0.96 1\n",
+ " flamingo 50 0.94 1\n",
+ " little blue heron 50 0.92 0.98\n",
+ " great egret 50 0.9 0.96\n",
+ " bittern 50 0.86 0.94\n",
+ " crane (bird) 50 0.62 0.9\n",
+ " limpkin 50 0.98 1\n",
+ " common gallinule 50 0.92 0.96\n",
+ " American coot 50 0.9 0.98\n",
+ " bustard 50 0.92 0.96\n",
+ " ruddy turnstone 50 0.94 1\n",
+ " dunlin 50 0.86 0.94\n",
+ " common redshank 50 0.9 0.96\n",
+ " dowitcher 50 0.84 0.96\n",
+ " oystercatcher 50 0.86 0.94\n",
+ " pelican 50 0.92 0.96\n",
+ " king penguin 50 0.88 0.96\n",
+ " albatross 50 0.9 1\n",
+ " grey whale 50 0.84 0.92\n",
+ " killer whale 50 0.92 1\n",
+ " dugong 50 0.84 0.96\n",
+ " sea lion 50 0.82 0.92\n",
+ " Chihuahua 50 0.66 0.84\n",
+ " Japanese Chin 50 0.72 0.98\n",
+ " Maltese 50 0.76 0.94\n",
+ " Pekingese 50 0.84 0.94\n",
+ " Shih Tzu 50 0.74 0.96\n",
+ " King Charles Spaniel 50 0.88 0.98\n",
+ " Papillon 50 0.86 0.94\n",
+ " toy terrier 50 0.48 0.94\n",
+ " Rhodesian Ridgeback 50 0.76 0.98\n",
+ " Afghan Hound 50 0.84 1\n",
+ " Basset Hound 50 0.8 0.92\n",
+ " Beagle 50 0.82 0.96\n",
+ " Bloodhound 50 0.48 0.72\n",
+ " Bluetick Coonhound 50 0.86 0.94\n",
+ " Black and Tan Coonhound 50 0.54 0.8\n",
+ "Treeing Walker Coonhound 50 0.66 0.98\n",
+ " English foxhound 50 0.32 0.84\n",
+ " Redbone Coonhound 50 0.62 0.94\n",
+ " borzoi 50 0.92 1\n",
+ " Irish Wolfhound 50 0.48 0.88\n",
+ " Italian Greyhound 50 0.76 0.98\n",
+ " Whippet 50 0.74 0.92\n",
+ " Ibizan Hound 50 0.6 0.86\n",
+ " Norwegian Elkhound 50 0.88 0.98\n",
+ " Otterhound 50 0.62 0.9\n",
+ " Saluki 50 0.72 0.92\n",
+ " Scottish Deerhound 50 0.86 0.98\n",
+ " Weimaraner 50 0.88 0.94\n",
+ "Staffordshire Bull Terrier 50 0.66 0.98\n",
+ "American Staffordshire Terrier 50 0.64 0.92\n",
+ " Bedlington Terrier 50 0.9 0.92\n",
+ " Border Terrier 50 0.86 0.92\n",
+ " Kerry Blue Terrier 50 0.78 0.98\n",
+ " Irish Terrier 50 0.7 0.96\n",
+ " Norfolk Terrier 50 0.68 0.9\n",
+ " Norwich Terrier 50 0.72 1\n",
+ " Yorkshire Terrier 50 0.66 0.9\n",
+ " Wire Fox Terrier 50 0.64 0.98\n",
+ " Lakeland Terrier 50 0.74 0.92\n",
+ " Sealyham Terrier 50 0.76 0.9\n",
+ " Airedale Terrier 50 0.82 0.92\n",
+ " Cairn Terrier 50 0.76 0.9\n",
+ " Australian Terrier 50 0.48 0.84\n",
+ " Dandie Dinmont Terrier 50 0.82 0.92\n",
+ " Boston Terrier 50 0.92 1\n",
+ " Miniature Schnauzer 50 0.68 0.9\n",
+ " Giant Schnauzer 50 0.72 0.98\n",
+ " Standard Schnauzer 50 0.74 1\n",
+ " Scottish Terrier 50 0.76 0.96\n",
+ " Tibetan Terrier 50 0.48 1\n",
+ "Australian Silky Terrier 50 0.66 0.96\n",
+ "Soft-coated Wheaten Terrier 50 0.74 0.96\n",
+ "West Highland White Terrier 50 0.88 0.96\n",
+ " Lhasa Apso 50 0.68 0.96\n",
+ " Flat-Coated Retriever 50 0.72 0.94\n",
+ " Curly-coated Retriever 50 0.82 0.94\n",
+ " Golden Retriever 50 0.86 0.94\n",
+ " Labrador Retriever 50 0.82 0.94\n",
+ "Chesapeake Bay Retriever 50 0.76 0.96\n",
+ "German Shorthaired Pointer 50 0.8 0.96\n",
+ " Vizsla 50 0.68 0.96\n",
+ " English Setter 50 0.7 1\n",
+ " Irish Setter 50 0.8 0.9\n",
+ " Gordon Setter 50 0.84 0.92\n",
+ " Brittany 50 0.84 0.96\n",
+ " Clumber Spaniel 50 0.92 0.96\n",
+ "English Springer Spaniel 50 0.88 1\n",
+ " Welsh Springer Spaniel 50 0.92 1\n",
+ " Cocker Spaniels 50 0.7 0.94\n",
+ " Sussex Spaniel 50 0.72 0.92\n",
+ " Irish Water Spaniel 50 0.88 0.98\n",
+ " Kuvasz 50 0.66 0.9\n",
+ " Schipperke 50 0.9 0.98\n",
+ " Groenendael 50 0.8 0.94\n",
+ " Malinois 50 0.86 0.98\n",
+ " Briard 50 0.52 0.8\n",
+ " Australian Kelpie 50 0.6 0.88\n",
+ " Komondor 50 0.88 0.94\n",
+ " Old English Sheepdog 50 0.94 0.98\n",
+ " Shetland Sheepdog 50 0.74 0.9\n",
+ " collie 50 0.6 0.96\n",
+ " Border Collie 50 0.74 0.96\n",
+ " Bouvier des Flandres 50 0.78 0.94\n",
+ " Rottweiler 50 0.88 0.96\n",
+ " German Shepherd Dog 50 0.8 0.98\n",
+ " Dobermann 50 0.68 0.96\n",
+ " Miniature Pinscher 50 0.76 0.88\n",
+ "Greater Swiss Mountain Dog 50 0.68 0.94\n",
+ " Bernese Mountain Dog 50 0.96 1\n",
+ " Appenzeller Sennenhund 50 0.22 1\n",
+ " Entlebucher Sennenhund 50 0.64 0.98\n",
+ " Boxer 50 0.7 0.92\n",
+ " Bullmastiff 50 0.78 0.98\n",
+ " Tibetan Mastiff 50 0.88 0.96\n",
+ " French Bulldog 50 0.84 0.94\n",
+ " Great Dane 50 0.54 0.9\n",
+ " St. Bernard 50 0.92 1\n",
+ " husky 50 0.46 0.98\n",
+ " Alaskan Malamute 50 0.76 0.96\n",
+ " Siberian Husky 50 0.46 0.98\n",
+ " Dalmatian 50 0.94 0.98\n",
+ " Affenpinscher 50 0.78 0.9\n",
+ " Basenji 50 0.92 0.94\n",
+ " pug 50 0.94 0.98\n",
+ " Leonberger 50 1 1\n",
+ " Newfoundland 50 0.78 0.96\n",
+ " Pyrenean Mountain Dog 50 0.78 0.96\n",
+ " Samoyed 50 0.96 1\n",
+ " Pomeranian 50 0.98 1\n",
+ " Chow Chow 50 0.9 0.96\n",
+ " Keeshond 50 0.88 0.94\n",
+ " Griffon Bruxellois 50 0.84 0.98\n",
+ " Pembroke Welsh Corgi 50 0.82 0.94\n",
+ " Cardigan Welsh Corgi 50 0.66 0.98\n",
+ " Toy Poodle 50 0.52 0.88\n",
+ " Miniature Poodle 50 0.52 0.92\n",
+ " Standard Poodle 50 0.8 1\n",
+ " Mexican hairless dog 50 0.88 0.98\n",
+ " grey wolf 50 0.82 0.92\n",
+ " Alaskan tundra wolf 50 0.78 0.98\n",
+ " red wolf 50 0.48 0.9\n",
+ " coyote 50 0.64 0.86\n",
+ " dingo 50 0.76 0.88\n",
+ " dhole 50 0.9 0.98\n",
+ " African wild dog 50 0.98 1\n",
+ " hyena 50 0.88 0.96\n",
+ " red fox 50 0.54 0.92\n",
+ " kit fox 50 0.72 0.98\n",
+ " Arctic fox 50 0.94 1\n",
+ " grey fox 50 0.7 0.94\n",
+ " tabby cat 50 0.54 0.92\n",
+ " tiger cat 50 0.22 0.94\n",
+ " Persian cat 50 0.9 0.98\n",
+ " Siamese cat 50 0.96 1\n",
+ " Egyptian Mau 50 0.54 0.8\n",
+ " cougar 50 0.9 1\n",
+ " lynx 50 0.72 0.88\n",
+ " leopard 50 0.78 0.98\n",
+ " snow leopard 50 0.9 0.98\n",
+ " jaguar 50 0.7 0.94\n",
+ " lion 50 0.9 0.98\n",
+ " tiger 50 0.92 0.98\n",
+ " cheetah 50 0.94 0.98\n",
+ " brown bear 50 0.94 0.98\n",
+ " American black bear 50 0.8 1\n",
+ " polar bear 50 0.84 0.96\n",
+ " sloth bear 50 0.72 0.92\n",
+ " mongoose 50 0.7 0.92\n",
+ " meerkat 50 0.82 0.92\n",
+ " tiger beetle 50 0.92 0.94\n",
+ " ladybug 50 0.86 0.94\n",
+ " ground beetle 50 0.64 0.94\n",
+ " longhorn beetle 50 0.62 0.88\n",
+ " leaf beetle 50 0.64 0.98\n",
+ " dung beetle 50 0.86 0.98\n",
+ " rhinoceros beetle 50 0.86 0.94\n",
+ " weevil 50 0.9 1\n",
+ " fly 50 0.78 0.94\n",
+ " bee 50 0.68 0.94\n",
+ " ant 50 0.68 0.78\n",
+ " grasshopper 50 0.5 0.92\n",
+ " cricket 50 0.64 0.92\n",
+ " stick insect 50 0.64 0.92\n",
+ " cockroach 50 0.72 0.8\n",
+ " mantis 50 0.64 0.86\n",
+ " cicada 50 0.9 0.96\n",
+ " leafhopper 50 0.88 0.94\n",
+ " lacewing 50 0.78 0.92\n",
+ " dragonfly 50 0.82 0.98\n",
+ " damselfly 50 0.82 1\n",
+ " red admiral 50 0.94 0.96\n",
+ " ringlet 50 0.86 0.98\n",
+ " monarch butterfly 50 0.9 0.92\n",
+ " small white 50 0.9 1\n",
+ " sulphur butterfly 50 0.92 1\n",
+ "gossamer-winged butterfly 50 0.88 1\n",
+ " starfish 50 0.88 0.92\n",
+ " sea urchin 50 0.84 0.94\n",
+ " sea cucumber 50 0.66 0.84\n",
+ " cottontail rabbit 50 0.72 0.94\n",
+ " hare 50 0.84 0.96\n",
+ " Angora rabbit 50 0.94 0.98\n",
+ " hamster 50 0.96 1\n",
+ " porcupine 50 0.88 0.98\n",
+ " fox squirrel 50 0.76 0.94\n",
+ " marmot 50 0.92 0.96\n",
+ " beaver 50 0.78 0.94\n",
+ " guinea pig 50 0.78 0.94\n",
+ " common sorrel 50 0.96 0.98\n",
+ " zebra 50 0.94 0.96\n",
+ " pig 50 0.5 0.76\n",
+ " wild boar 50 0.84 0.96\n",
+ " warthog 50 0.84 0.96\n",
+ " hippopotamus 50 0.88 0.96\n",
+ " ox 50 0.48 0.94\n",
+ " water buffalo 50 0.78 0.94\n",
+ " bison 50 0.88 0.96\n",
+ " ram 50 0.58 0.92\n",
+ " bighorn sheep 50 0.66 1\n",
+ " Alpine ibex 50 0.92 0.98\n",
+ " hartebeest 50 0.94 1\n",
+ " impala 50 0.82 0.96\n",
+ " gazelle 50 0.7 0.96\n",
+ " dromedary 50 0.9 1\n",
+ " llama 50 0.82 0.94\n",
+ " weasel 50 0.44 0.92\n",
+ " mink 50 0.78 0.96\n",
+ " European polecat 50 0.46 0.9\n",
+ " black-footed ferret 50 0.68 0.96\n",
+ " otter 50 0.66 0.88\n",
+ " skunk 50 0.96 0.96\n",
+ " badger 50 0.86 0.92\n",
+ " armadillo 50 0.88 0.9\n",
+ " three-toed sloth 50 0.96 1\n",
+ " orangutan 50 0.78 0.92\n",
+ " gorilla 50 0.82 0.94\n",
+ " chimpanzee 50 0.84 0.94\n",
+ " gibbon 50 0.76 0.86\n",
+ " siamang 50 0.68 0.94\n",
+ " guenon 50 0.8 0.94\n",
+ " patas monkey 50 0.62 0.82\n",
+ " baboon 50 0.9 0.98\n",
+ " macaque 50 0.8 0.86\n",
+ " langur 50 0.6 0.82\n",
+ " black-and-white colobus 50 0.86 0.9\n",
+ " proboscis monkey 50 1 1\n",
+ " marmoset 50 0.74 0.98\n",
+ " white-headed capuchin 50 0.72 0.9\n",
+ " howler monkey 50 0.86 0.94\n",
+ " titi 50 0.5 0.9\n",
+ "Geoffroy's spider monkey 50 0.42 0.8\n",
+ " common squirrel monkey 50 0.76 0.92\n",
+ " ring-tailed lemur 50 0.72 0.94\n",
+ " indri 50 0.9 0.96\n",
+ " Asian elephant 50 0.58 0.92\n",
+ " African bush elephant 50 0.7 0.98\n",
+ " red panda 50 0.94 0.94\n",
+ " giant panda 50 0.94 0.98\n",
+ " snoek 50 0.74 0.9\n",
+ " eel 50 0.6 0.84\n",
+ " coho salmon 50 0.84 0.96\n",
+ " rock beauty 50 0.88 0.98\n",
+ " clownfish 50 0.78 0.98\n",
+ " sturgeon 50 0.68 0.94\n",
+ " garfish 50 0.62 0.8\n",
+ " lionfish 50 0.96 0.96\n",
+ " pufferfish 50 0.88 0.96\n",
+ " abacus 50 0.74 0.88\n",
+ " abaya 50 0.84 0.92\n",
+ " academic gown 50 0.42 0.86\n",
+ " accordion 50 0.8 0.9\n",
+ " acoustic guitar 50 0.5 0.76\n",
+ " aircraft carrier 50 0.8 0.96\n",
+ " airliner 50 0.92 1\n",
+ " airship 50 0.76 0.82\n",
+ " altar 50 0.64 0.98\n",
+ " ambulance 50 0.88 0.98\n",
+ " amphibious vehicle 50 0.64 0.94\n",
+ " analog clock 50 0.52 0.92\n",
+ " apiary 50 0.82 0.96\n",
+ " apron 50 0.7 0.84\n",
+ " waste container 50 0.4 0.8\n",
+ " assault rifle 50 0.42 0.84\n",
+ " backpack 50 0.34 0.64\n",
+ " bakery 50 0.4 0.68\n",
+ " balance beam 50 0.8 0.98\n",
+ " balloon 50 0.86 0.96\n",
+ " ballpoint pen 50 0.52 0.96\n",
+ " Band-Aid 50 0.7 0.9\n",
+ " banjo 50 0.84 1\n",
+ " baluster 50 0.68 0.94\n",
+ " barbell 50 0.56 0.9\n",
+ " barber chair 50 0.7 0.92\n",
+ " barbershop 50 0.54 0.86\n",
+ " barn 50 0.96 0.96\n",
+ " barometer 50 0.84 0.98\n",
+ " barrel 50 0.56 0.88\n",
+ " wheelbarrow 50 0.66 0.88\n",
+ " baseball 50 0.74 0.98\n",
+ " basketball 50 0.88 0.98\n",
+ " bassinet 50 0.66 0.92\n",
+ " bassoon 50 0.74 0.98\n",
+ " swimming cap 50 0.62 0.88\n",
+ " bath towel 50 0.54 0.78\n",
+ " bathtub 50 0.4 0.88\n",
+ " station wagon 50 0.66 0.84\n",
+ " lighthouse 50 0.78 0.94\n",
+ " beaker 50 0.52 0.68\n",
+ " military cap 50 0.84 0.96\n",
+ " beer bottle 50 0.66 0.88\n",
+ " beer glass 50 0.6 0.84\n",
+ " bell-cot 50 0.56 0.96\n",
+ " bib 50 0.58 0.82\n",
+ " tandem bicycle 50 0.86 0.96\n",
+ " bikini 50 0.56 0.88\n",
+ " ring binder 50 0.64 0.84\n",
+ " binoculars 50 0.54 0.78\n",
+ " birdhouse 50 0.86 0.94\n",
+ " boathouse 50 0.74 0.92\n",
+ " bobsleigh 50 0.92 0.96\n",
+ " bolo tie 50 0.8 0.94\n",
+ " poke bonnet 50 0.64 0.86\n",
+ " bookcase 50 0.66 0.92\n",
+ " bookstore 50 0.62 0.88\n",
+ " bottle cap 50 0.58 0.7\n",
+ " bow 50 0.72 0.86\n",
+ " bow tie 50 0.7 0.9\n",
+ " brass 50 0.92 0.96\n",
+ " bra 50 0.5 0.7\n",
+ " breakwater 50 0.62 0.86\n",
+ " breastplate 50 0.4 0.9\n",
+ " broom 50 0.6 0.86\n",
+ " bucket 50 0.66 0.8\n",
+ " buckle 50 0.5 0.68\n",
+ " bulletproof vest 50 0.5 0.78\n",
+ " high-speed train 50 0.94 0.96\n",
+ " butcher shop 50 0.74 0.94\n",
+ " taxicab 50 0.64 0.86\n",
+ " cauldron 50 0.44 0.66\n",
+ " candle 50 0.48 0.74\n",
+ " cannon 50 0.88 0.94\n",
+ " canoe 50 0.94 1\n",
+ " can opener 50 0.66 0.86\n",
+ " cardigan 50 0.68 0.8\n",
+ " car mirror 50 0.94 0.96\n",
+ " carousel 50 0.94 0.98\n",
+ " tool kit 50 0.56 0.78\n",
+ " carton 50 0.42 0.7\n",
+ " car wheel 50 0.38 0.74\n",
+ "automated teller machine 50 0.76 0.94\n",
+ " cassette 50 0.52 0.8\n",
+ " cassette player 50 0.28 0.9\n",
+ " castle 50 0.78 0.88\n",
+ " catamaran 50 0.78 1\n",
+ " CD player 50 0.52 0.82\n",
+ " cello 50 0.82 1\n",
+ " mobile phone 50 0.68 0.86\n",
+ " chain 50 0.38 0.66\n",
+ " chain-link fence 50 0.7 0.84\n",
+ " chain mail 50 0.64 0.9\n",
+ " chainsaw 50 0.84 0.92\n",
+ " chest 50 0.68 0.92\n",
+ " chiffonier 50 0.26 0.64\n",
+ " chime 50 0.62 0.84\n",
+ " china cabinet 50 0.82 0.96\n",
+ " Christmas stocking 50 0.92 0.94\n",
+ " church 50 0.62 0.9\n",
+ " movie theater 50 0.58 0.88\n",
+ " cleaver 50 0.32 0.62\n",
+ " cliff dwelling 50 0.88 1\n",
+ " cloak 50 0.32 0.64\n",
+ " clogs 50 0.58 0.88\n",
+ " cocktail shaker 50 0.62 0.7\n",
+ " coffee mug 50 0.44 0.72\n",
+ " coffeemaker 50 0.64 0.92\n",
+ " coil 50 0.66 0.84\n",
+ " combination lock 50 0.64 0.84\n",
+ " computer keyboard 50 0.7 0.82\n",
+ " confectionery store 50 0.54 0.86\n",
+ " container ship 50 0.82 0.98\n",
+ " convertible 50 0.78 0.98\n",
+ " corkscrew 50 0.82 0.92\n",
+ " cornet 50 0.46 0.88\n",
+ " cowboy boot 50 0.64 0.8\n",
+ " cowboy hat 50 0.64 0.82\n",
+ " cradle 50 0.38 0.8\n",
+ " crane (machine) 50 0.78 0.94\n",
+ " crash helmet 50 0.92 0.96\n",
+ " crate 50 0.52 0.82\n",
+ " infant bed 50 0.74 1\n",
+ " Crock Pot 50 0.78 0.9\n",
+ " croquet ball 50 0.9 0.96\n",
+ " crutch 50 0.46 0.7\n",
+ " cuirass 50 0.54 0.86\n",
+ " dam 50 0.74 0.92\n",
+ " desk 50 0.6 0.86\n",
+ " desktop computer 50 0.54 0.94\n",
+ " rotary dial telephone 50 0.88 0.94\n",
+ " diaper 50 0.68 0.84\n",
+ " digital clock 50 0.54 0.76\n",
+ " digital watch 50 0.58 0.86\n",
+ " dining table 50 0.76 0.9\n",
+ " dishcloth 50 0.94 1\n",
+ " dishwasher 50 0.44 0.78\n",
+ " disc brake 50 0.98 1\n",
+ " dock 50 0.54 0.94\n",
+ " dog sled 50 0.84 1\n",
+ " dome 50 0.72 0.92\n",
+ " doormat 50 0.56 0.82\n",
+ " drilling rig 50 0.84 0.96\n",
+ " drum 50 0.38 0.68\n",
+ " drumstick 50 0.56 0.72\n",
+ " dumbbell 50 0.62 0.9\n",
+ " Dutch oven 50 0.7 0.84\n",
+ " electric fan 50 0.82 0.86\n",
+ " electric guitar 50 0.62 0.84\n",
+ " electric locomotive 50 0.92 0.98\n",
+ " entertainment center 50 0.9 0.98\n",
+ " envelope 50 0.44 0.86\n",
+ " espresso machine 50 0.72 0.94\n",
+ " face powder 50 0.7 0.92\n",
+ " feather boa 50 0.7 0.84\n",
+ " filing cabinet 50 0.88 0.98\n",
+ " fireboat 50 0.94 0.98\n",
+ " fire engine 50 0.84 0.9\n",
+ " fire screen sheet 50 0.62 0.76\n",
+ " flagpole 50 0.74 0.88\n",
+ " flute 50 0.36 0.72\n",
+ " folding chair 50 0.62 0.84\n",
+ " football helmet 50 0.86 0.94\n",
+ " forklift 50 0.8 0.92\n",
+ " fountain 50 0.84 0.94\n",
+ " fountain pen 50 0.76 0.92\n",
+ " four-poster bed 50 0.78 0.94\n",
+ " freight car 50 0.96 1\n",
+ " French horn 50 0.76 0.92\n",
+ " frying pan 50 0.36 0.78\n",
+ " fur coat 50 0.84 0.96\n",
+ " garbage truck 50 0.9 0.98\n",
+ " gas mask 50 0.84 0.92\n",
+ " gas pump 50 0.9 0.98\n",
+ " goblet 50 0.68 0.82\n",
+ " go-kart 50 0.9 1\n",
+ " golf ball 50 0.84 0.9\n",
+ " golf cart 50 0.78 0.86\n",
+ " gondola 50 0.98 0.98\n",
+ " gong 50 0.74 0.92\n",
+ " gown 50 0.62 0.96\n",
+ " grand piano 50 0.7 0.96\n",
+ " greenhouse 50 0.8 0.98\n",
+ " grille 50 0.72 0.9\n",
+ " grocery store 50 0.66 0.94\n",
+ " guillotine 50 0.86 0.92\n",
+ " barrette 50 0.52 0.66\n",
+ " hair spray 50 0.5 0.74\n",
+ " half-track 50 0.78 0.9\n",
+ " hammer 50 0.56 0.76\n",
+ " hamper 50 0.64 0.84\n",
+ " hair dryer 50 0.56 0.74\n",
+ " hand-held computer 50 0.42 0.86\n",
+ " handkerchief 50 0.78 0.94\n",
+ " hard disk drive 50 0.76 0.84\n",
+ " harmonica 50 0.7 0.88\n",
+ " harp 50 0.88 0.96\n",
+ " harvester 50 0.78 1\n",
+ " hatchet 50 0.54 0.74\n",
+ " holster 50 0.66 0.84\n",
+ " home theater 50 0.64 0.94\n",
+ " honeycomb 50 0.56 0.88\n",
+ " hook 50 0.3 0.6\n",
+ " hoop skirt 50 0.64 0.86\n",
+ " horizontal bar 50 0.68 0.98\n",
+ " horse-drawn vehicle 50 0.88 0.94\n",
+ " hourglass 50 0.88 0.96\n",
+ " iPod 50 0.76 0.94\n",
+ " clothes iron 50 0.82 0.88\n",
+ " jack-o'-lantern 50 0.98 0.98\n",
+ " jeans 50 0.68 0.84\n",
+ " jeep 50 0.72 0.9\n",
+ " T-shirt 50 0.72 0.96\n",
+ " jigsaw puzzle 50 0.84 0.94\n",
+ " pulled rickshaw 50 0.86 0.94\n",
+ " joystick 50 0.8 0.9\n",
+ " kimono 50 0.84 0.96\n",
+ " knee pad 50 0.62 0.88\n",
+ " knot 50 0.66 0.8\n",
+ " lab coat 50 0.8 0.96\n",
+ " ladle 50 0.36 0.64\n",
+ " lampshade 50 0.48 0.84\n",
+ " laptop computer 50 0.26 0.88\n",
+ " lawn mower 50 0.78 0.96\n",
+ " lens cap 50 0.46 0.72\n",
+ " paper knife 50 0.26 0.5\n",
+ " library 50 0.54 0.9\n",
+ " lifeboat 50 0.92 0.98\n",
+ " lighter 50 0.56 0.78\n",
+ " limousine 50 0.76 0.92\n",
+ " ocean liner 50 0.88 0.94\n",
+ " lipstick 50 0.74 0.9\n",
+ " slip-on shoe 50 0.74 0.92\n",
+ " lotion 50 0.5 0.86\n",
+ " speaker 50 0.52 0.68\n",
+ " loupe 50 0.32 0.52\n",
+ " sawmill 50 0.72 0.9\n",
+ " magnetic compass 50 0.52 0.82\n",
+ " mail bag 50 0.68 0.92\n",
+ " mailbox 50 0.82 0.92\n",
+ " tights 50 0.22 0.94\n",
+ " tank suit 50 0.24 0.9\n",
+ " manhole cover 50 0.96 0.98\n",
+ " maraca 50 0.74 0.9\n",
+ " marimba 50 0.84 0.94\n",
+ " mask 50 0.44 0.82\n",
+ " match 50 0.66 0.9\n",
+ " maypole 50 0.96 1\n",
+ " maze 50 0.8 0.96\n",
+ " measuring cup 50 0.54 0.76\n",
+ " medicine chest 50 0.6 0.84\n",
+ " megalith 50 0.8 0.92\n",
+ " microphone 50 0.52 0.7\n",
+ " microwave oven 50 0.48 0.72\n",
+ " military uniform 50 0.62 0.84\n",
+ " milk can 50 0.68 0.82\n",
+ " minibus 50 0.7 1\n",
+ " miniskirt 50 0.46 0.76\n",
+ " minivan 50 0.38 0.8\n",
+ " missile 50 0.4 0.84\n",
+ " mitten 50 0.76 0.88\n",
+ " mixing bowl 50 0.8 0.92\n",
+ " mobile home 50 0.54 0.78\n",
+ " Model T 50 0.92 0.96\n",
+ " modem 50 0.58 0.86\n",
+ " monastery 50 0.44 0.9\n",
+ " monitor 50 0.4 0.86\n",
+ " moped 50 0.56 0.94\n",
+ " mortar 50 0.68 0.94\n",
+ " square academic cap 50 0.5 0.84\n",
+ " mosque 50 0.9 1\n",
+ " mosquito net 50 0.9 0.98\n",
+ " scooter 50 0.9 0.98\n",
+ " mountain bike 50 0.78 0.96\n",
+ " tent 50 0.88 0.96\n",
+ " computer mouse 50 0.42 0.82\n",
+ " mousetrap 50 0.76 0.88\n",
+ " moving van 50 0.4 0.72\n",
+ " muzzle 50 0.5 0.72\n",
+ " nail 50 0.68 0.74\n",
+ " neck brace 50 0.56 0.68\n",
+ " necklace 50 0.86 1\n",
+ " nipple 50 0.7 0.88\n",
+ " notebook computer 50 0.34 0.84\n",
+ " obelisk 50 0.8 0.92\n",
+ " oboe 50 0.6 0.84\n",
+ " ocarina 50 0.8 0.86\n",
+ " odometer 50 0.96 1\n",
+ " oil filter 50 0.58 0.82\n",
+ " organ 50 0.82 0.9\n",
+ " oscilloscope 50 0.9 0.96\n",
+ " overskirt 50 0.2 0.7\n",
+ " bullock cart 50 0.7 0.94\n",
+ " oxygen mask 50 0.46 0.84\n",
+ " packet 50 0.5 0.78\n",
+ " paddle 50 0.56 0.94\n",
+ " paddle wheel 50 0.86 0.96\n",
+ " padlock 50 0.74 0.78\n",
+ " paintbrush 50 0.62 0.8\n",
+ " pajamas 50 0.56 0.92\n",
+ " palace 50 0.64 0.96\n",
+ " pan flute 50 0.84 0.86\n",
+ " paper towel 50 0.66 0.84\n",
+ " parachute 50 0.92 0.94\n",
+ " parallel bars 50 0.62 0.96\n",
+ " park bench 50 0.74 0.9\n",
+ " parking meter 50 0.84 0.92\n",
+ " passenger car 50 0.5 0.82\n",
+ " patio 50 0.58 0.84\n",
+ " payphone 50 0.74 0.92\n",
+ " pedestal 50 0.52 0.9\n",
+ " pencil case 50 0.64 0.92\n",
+ " pencil sharpener 50 0.52 0.78\n",
+ " perfume 50 0.7 0.9\n",
+ " Petri dish 50 0.6 0.8\n",
+ " photocopier 50 0.88 0.98\n",
+ " plectrum 50 0.7 0.84\n",
+ " Pickelhaube 50 0.72 0.86\n",
+ " picket fence 50 0.84 0.94\n",
+ " pickup truck 50 0.64 0.92\n",
+ " pier 50 0.52 0.82\n",
+ " piggy bank 50 0.82 0.94\n",
+ " pill bottle 50 0.76 0.86\n",
+ " pillow 50 0.76 0.9\n",
+ " ping-pong ball 50 0.84 0.88\n",
+ " pinwheel 50 0.76 0.88\n",
+ " pirate ship 50 0.76 0.94\n",
+ " pitcher 50 0.46 0.84\n",
+ " hand plane 50 0.84 0.94\n",
+ " planetarium 50 0.88 0.98\n",
+ " plastic bag 50 0.36 0.62\n",
+ " plate rack 50 0.52 0.78\n",
+ " plow 50 0.78 0.88\n",
+ " plunger 50 0.42 0.7\n",
+ " Polaroid camera 50 0.84 0.92\n",
+ " pole 50 0.38 0.74\n",
+ " police van 50 0.76 0.94\n",
+ " poncho 50 0.58 0.86\n",
+ " billiard table 50 0.8 0.88\n",
+ " soda bottle 50 0.56 0.94\n",
+ " pot 50 0.78 0.92\n",
+ " potter's wheel 50 0.9 0.94\n",
+ " power drill 50 0.42 0.72\n",
+ " prayer rug 50 0.7 0.86\n",
+ " printer 50 0.54 0.86\n",
+ " prison 50 0.7 0.9\n",
+ " projectile 50 0.28 0.9\n",
+ " projector 50 0.62 0.84\n",
+ " hockey puck 50 0.92 0.96\n",
+ " punching bag 50 0.6 0.68\n",
+ " purse 50 0.42 0.78\n",
+ " quill 50 0.68 0.84\n",
+ " quilt 50 0.64 0.9\n",
+ " race car 50 0.72 0.92\n",
+ " racket 50 0.72 0.9\n",
+ " radiator 50 0.66 0.76\n",
+ " radio 50 0.64 0.92\n",
+ " radio telescope 50 0.9 0.96\n",
+ " rain barrel 50 0.8 0.98\n",
+ " recreational vehicle 50 0.84 0.94\n",
+ " reel 50 0.72 0.82\n",
+ " reflex camera 50 0.72 0.92\n",
+ " refrigerator 50 0.7 0.9\n",
+ " remote control 50 0.7 0.88\n",
+ " restaurant 50 0.5 0.66\n",
+ " revolver 50 0.82 1\n",
+ " rifle 50 0.38 0.7\n",
+ " rocking chair 50 0.62 0.84\n",
+ " rotisserie 50 0.88 0.92\n",
+ " eraser 50 0.54 0.76\n",
+ " rugby ball 50 0.86 0.94\n",
+ " ruler 50 0.68 0.86\n",
+ " running shoe 50 0.78 0.94\n",
+ " safe 50 0.82 0.92\n",
+ " safety pin 50 0.4 0.62\n",
+ " salt shaker 50 0.66 0.9\n",
+ " sandal 50 0.66 0.86\n",
+ " sarong 50 0.64 0.86\n",
+ " saxophone 50 0.66 0.88\n",
+ " scabbard 50 0.76 0.92\n",
+ " weighing scale 50 0.58 0.78\n",
+ " school bus 50 0.92 1\n",
+ " schooner 50 0.84 1\n",
+ " scoreboard 50 0.9 0.96\n",
+ " CRT screen 50 0.14 0.7\n",
+ " screw 50 0.9 0.98\n",
+ " screwdriver 50 0.3 0.58\n",
+ " seat belt 50 0.88 0.94\n",
+ " sewing machine 50 0.76 0.9\n",
+ " shield 50 0.56 0.82\n",
+ " shoe store 50 0.78 0.96\n",
+ " shoji 50 0.8 0.92\n",
+ " shopping basket 50 0.52 0.88\n",
+ " shopping cart 50 0.76 0.92\n",
+ " shovel 50 0.62 0.84\n",
+ " shower cap 50 0.7 0.84\n",
+ " shower curtain 50 0.64 0.82\n",
+ " ski 50 0.74 0.92\n",
+ " ski mask 50 0.72 0.88\n",
+ " sleeping bag 50 0.68 0.8\n",
+ " slide rule 50 0.72 0.88\n",
+ " sliding door 50 0.44 0.78\n",
+ " slot machine 50 0.94 0.98\n",
+ " snorkel 50 0.86 0.98\n",
+ " snowmobile 50 0.88 1\n",
+ " snowplow 50 0.84 0.98\n",
+ " soap dispenser 50 0.56 0.86\n",
+ " soccer ball 50 0.86 0.96\n",
+ " sock 50 0.62 0.76\n",
+ " solar thermal collector 50 0.72 0.96\n",
+ " sombrero 50 0.6 0.84\n",
+ " soup bowl 50 0.56 0.94\n",
+ " space bar 50 0.34 0.88\n",
+ " space heater 50 0.52 0.74\n",
+ " space shuttle 50 0.82 0.96\n",
+ " spatula 50 0.3 0.6\n",
+ " motorboat 50 0.86 1\n",
+ " spider web 50 0.7 0.9\n",
+ " spindle 50 0.86 0.98\n",
+ " sports car 50 0.6 0.94\n",
+ " spotlight 50 0.26 0.6\n",
+ " stage 50 0.68 0.86\n",
+ " steam locomotive 50 0.94 1\n",
+ " through arch bridge 50 0.84 0.96\n",
+ " steel drum 50 0.82 0.9\n",
+ " stethoscope 50 0.6 0.82\n",
+ " scarf 50 0.5 0.92\n",
+ " stone wall 50 0.76 0.9\n",
+ " stopwatch 50 0.58 0.9\n",
+ " stove 50 0.46 0.74\n",
+ " strainer 50 0.64 0.84\n",
+ " tram 50 0.88 0.96\n",
+ " stretcher 50 0.6 0.8\n",
+ " couch 50 0.8 0.96\n",
+ " stupa 50 0.88 0.88\n",
+ " submarine 50 0.72 0.92\n",
+ " suit 50 0.4 0.78\n",
+ " sundial 50 0.58 0.74\n",
+ " sunglass 50 0.14 0.58\n",
+ " sunglasses 50 0.28 0.58\n",
+ " sunscreen 50 0.32 0.7\n",
+ " suspension bridge 50 0.6 0.94\n",
+ " mop 50 0.74 0.92\n",
+ " sweatshirt 50 0.28 0.66\n",
+ " swimsuit 50 0.52 0.82\n",
+ " swing 50 0.76 0.84\n",
+ " switch 50 0.56 0.76\n",
+ " syringe 50 0.62 0.82\n",
+ " table lamp 50 0.6 0.88\n",
+ " tank 50 0.8 0.96\n",
+ " tape player 50 0.46 0.76\n",
+ " teapot 50 0.84 1\n",
+ " teddy bear 50 0.82 0.94\n",
+ " television 50 0.6 0.9\n",
+ " tennis ball 50 0.7 0.94\n",
+ " thatched roof 50 0.88 0.9\n",
+ " front curtain 50 0.8 0.92\n",
+ " thimble 50 0.6 0.8\n",
+ " threshing machine 50 0.56 0.88\n",
+ " throne 50 0.72 0.82\n",
+ " tile roof 50 0.72 0.94\n",
+ " toaster 50 0.66 0.84\n",
+ " tobacco shop 50 0.42 0.7\n",
+ " toilet seat 50 0.62 0.88\n",
+ " torch 50 0.64 0.84\n",
+ " totem pole 50 0.92 0.98\n",
+ " tow truck 50 0.62 0.88\n",
+ " toy store 50 0.6 0.94\n",
+ " tractor 50 0.76 0.98\n",
+ " semi-trailer truck 50 0.78 0.92\n",
+ " tray 50 0.46 0.64\n",
+ " trench coat 50 0.54 0.72\n",
+ " tricycle 50 0.72 0.94\n",
+ " trimaran 50 0.7 0.98\n",
+ " tripod 50 0.58 0.86\n",
+ " triumphal arch 50 0.92 0.98\n",
+ " trolleybus 50 0.9 1\n",
+ " trombone 50 0.54 0.88\n",
+ " tub 50 0.24 0.82\n",
+ " turnstile 50 0.84 0.94\n",
+ " typewriter keyboard 50 0.68 0.98\n",
+ " umbrella 50 0.52 0.7\n",
+ " unicycle 50 0.74 0.96\n",
+ " upright piano 50 0.76 0.9\n",
+ " vacuum cleaner 50 0.62 0.9\n",
+ " vase 50 0.5 0.78\n",
+ " vault 50 0.76 0.92\n",
+ " velvet 50 0.2 0.42\n",
+ " vending machine 50 0.9 1\n",
+ " vestment 50 0.54 0.82\n",
+ " viaduct 50 0.78 0.86\n",
+ " violin 50 0.68 0.78\n",
+ " volleyball 50 0.86 1\n",
+ " waffle iron 50 0.72 0.88\n",
+ " wall clock 50 0.54 0.88\n",
+ " wallet 50 0.52 0.9\n",
+ " wardrobe 50 0.68 0.88\n",
+ " military aircraft 50 0.9 0.98\n",
+ " sink 50 0.72 0.96\n",
+ " washing machine 50 0.78 0.94\n",
+ " water bottle 50 0.54 0.74\n",
+ " water jug 50 0.22 0.74\n",
+ " water tower 50 0.9 0.96\n",
+ " whiskey jug 50 0.64 0.74\n",
+ " whistle 50 0.72 0.84\n",
+ " wig 50 0.84 0.9\n",
+ " window screen 50 0.68 0.8\n",
+ " window shade 50 0.52 0.76\n",
+ " Windsor tie 50 0.22 0.66\n",
+ " wine bottle 50 0.42 0.82\n",
+ " wing 50 0.54 0.96\n",
+ " wok 50 0.46 0.82\n",
+ " wooden spoon 50 0.58 0.8\n",
+ " wool 50 0.32 0.82\n",
+ " split-rail fence 50 0.74 0.9\n",
+ " shipwreck 50 0.84 0.96\n",
+ " yawl 50 0.78 0.96\n",
+ " yurt 50 0.84 1\n",
+ " website 50 0.98 1\n",
+ " comic book 50 0.62 0.9\n",
+ " crossword 50 0.84 0.88\n",
+ " traffic sign 50 0.78 0.9\n",
+ " traffic light 50 0.8 0.94\n",
+ " dust jacket 50 0.72 0.94\n",
+ " menu 50 0.82 0.96\n",
+ " plate 50 0.44 0.88\n",
+ " guacamole 50 0.8 0.92\n",
+ " consomme 50 0.54 0.88\n",
+ " hot pot 50 0.86 0.98\n",
+ " trifle 50 0.92 0.98\n",
+ " ice cream 50 0.68 0.94\n",
+ " ice pop 50 0.62 0.84\n",
+ " baguette 50 0.62 0.88\n",
+ " bagel 50 0.64 0.92\n",
+ " pretzel 50 0.72 0.88\n",
+ " cheeseburger 50 0.9 1\n",
+ " hot dog 50 0.74 0.94\n",
+ " mashed potato 50 0.74 0.9\n",
+ " cabbage 50 0.84 0.96\n",
+ " broccoli 50 0.9 0.96\n",
+ " cauliflower 50 0.82 1\n",
+ " zucchini 50 0.74 0.9\n",
+ " spaghetti squash 50 0.8 0.96\n",
+ " acorn squash 50 0.82 0.96\n",
+ " butternut squash 50 0.7 0.94\n",
+ " cucumber 50 0.6 0.96\n",
+ " artichoke 50 0.84 0.94\n",
+ " bell pepper 50 0.84 0.98\n",
+ " cardoon 50 0.88 0.94\n",
+ " mushroom 50 0.38 0.92\n",
+ " Granny Smith 50 0.9 0.96\n",
+ " strawberry 50 0.6 0.88\n",
+ " orange 50 0.7 0.92\n",
+ " lemon 50 0.78 0.98\n",
+ " fig 50 0.82 0.96\n",
+ " pineapple 50 0.86 0.96\n",
+ " banana 50 0.84 0.96\n",
+ " jackfruit 50 0.9 0.98\n",
+ " custard apple 50 0.86 0.96\n",
+ " pomegranate 50 0.82 0.98\n",
+ " hay 50 0.8 0.92\n",
+ " carbonara 50 0.88 0.94\n",
+ " chocolate syrup 50 0.46 0.84\n",
+ " dough 50 0.4 0.6\n",
+ " meatloaf 50 0.58 0.84\n",
+ " pizza 50 0.84 0.96\n",
+ " pot pie 50 0.68 0.9\n",
+ " burrito 50 0.8 0.98\n",
+ " red wine 50 0.54 0.82\n",
+ " espresso 50 0.64 0.88\n",
+ " cup 50 0.38 0.7\n",
+ " eggnog 50 0.38 0.7\n",
+ " alp 50 0.54 0.88\n",
+ " bubble 50 0.8 0.96\n",
+ " cliff 50 0.64 1\n",
+ " coral reef 50 0.72 0.96\n",
+ " geyser 50 0.94 1\n",
+ " lakeshore 50 0.54 0.88\n",
+ " promontory 50 0.58 0.94\n",
+ " shoal 50 0.6 0.96\n",
+ " seashore 50 0.44 0.78\n",
+ " valley 50 0.72 0.94\n",
+ " volcano 50 0.78 0.96\n",
+ " baseball player 50 0.72 0.94\n",
+ " bridegroom 50 0.72 0.88\n",
+ " scuba diver 50 0.8 1\n",
+ " rapeseed 50 0.94 0.98\n",
+ " daisy 50 0.96 0.98\n",
+ " yellow lady's slipper 50 1 1\n",
+ " corn 50 0.4 0.88\n",
+ " acorn 50 0.92 0.98\n",
+ " rose hip 50 0.92 0.98\n",
+ " horse chestnut seed 50 0.94 0.98\n",
+ " coral fungus 50 0.96 0.96\n",
+ " agaric 50 0.82 0.94\n",
+ " gyromitra 50 0.98 1\n",
+ " stinkhorn mushroom 50 0.8 0.94\n",
+ " earth star 50 0.98 1\n",
+ " hen-of-the-woods 50 0.8 0.96\n",
+ " bolete 50 0.74 0.94\n",
+ " ear 50 0.48 0.94\n",
+ " toilet paper 50 0.36 0.68\n",
+ "Speed: 0.1ms pre-process, 0.3ms inference, 0.0ms post-process per image at shape (1, 3, 224, 224)\n",
+ "Results saved to \u001b[1mruns/val-cls/exp\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Validate YOLOv5s on Imagenet val\n",
+ "!python classify/val.py --weights yolov5s-cls.pt --data ../datasets/imagenet --img 224 --half"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "ZY2VXXXu74w5"
+ },
+ "source": [
+ "# 3. Train\n",
+ "\n",
+ "
"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "0eq1SMWl6Sfn"
+ },
+ "source": [
+ "# 2. Validate\n",
+ "Validate a model's accuracy on the [Imagenet](https://image-net.org/) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "WQPtK1QYVaD_",
+ "outputId": "20fc0630-141e-4a90-ea06-342cbd7ce496"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "--2022-11-22 19:53:40-- https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar\n",
+ "Resolving image-net.org (image-net.org)... 171.64.68.16\n",
+ "Connecting to image-net.org (image-net.org)|171.64.68.16|:443... connected.\n",
+ "HTTP request sent, awaiting response... 200 OK\n",
+ "Length: 6744924160 (6.3G) [application/x-tar]\n",
+ "Saving to: ‘ILSVRC2012_img_val.tar’\n",
+ "\n",
+ "ILSVRC2012_img_val. 100%[===================>] 6.28G 16.1MB/s in 10m 52s \n",
+ "\n",
+ "2022-11-22 20:04:32 (9.87 MB/s) - ‘ILSVRC2012_img_val.tar’ saved [6744924160/6744924160]\n",
+ "\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Download Imagenet val (6.3G, 50000 images)\n",
+ "!bash data/scripts/get_imagenet.sh --val"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "X58w8JLpMnjH",
+ "outputId": "41843132-98e2-4c25-d474-4cd7b246fb8e"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "\u001b[34m\u001b[1mclassify/val: \u001b[0mdata=../datasets/imagenet, weights=['yolov5s-cls.pt'], batch_size=128, imgsz=224, device=, workers=8, verbose=True, project=runs/val-cls, name=exp, exist_ok=False, half=True, dnn=False\n",
+ "YOLOv5 🚀 v7.0-3-g61ebf5e Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
+ "\n",
+ "Fusing layers... \n",
+ "Model summary: 117 layers, 5447688 parameters, 0 gradients, 11.4 GFLOPs\n",
+ "validating: 100% 391/391 [04:57<00:00, 1.31it/s]\n",
+ " Class Images top1_acc top5_acc\n",
+ " all 50000 0.715 0.902\n",
+ " tench 50 0.94 0.98\n",
+ " goldfish 50 0.88 0.92\n",
+ " great white shark 50 0.78 0.96\n",
+ " tiger shark 50 0.68 0.96\n",
+ " hammerhead shark 50 0.82 0.92\n",
+ " electric ray 50 0.76 0.9\n",
+ " stingray 50 0.7 0.9\n",
+ " cock 50 0.78 0.92\n",
+ " hen 50 0.84 0.96\n",
+ " ostrich 50 0.98 1\n",
+ " brambling 50 0.9 0.96\n",
+ " goldfinch 50 0.92 0.98\n",
+ " house finch 50 0.88 0.96\n",
+ " junco 50 0.94 0.98\n",
+ " indigo bunting 50 0.86 0.88\n",
+ " American robin 50 0.9 0.96\n",
+ " bulbul 50 0.84 0.96\n",
+ " jay 50 0.9 0.96\n",
+ " magpie 50 0.84 0.96\n",
+ " chickadee 50 0.9 1\n",
+ " American dipper 50 0.82 0.92\n",
+ " kite 50 0.76 0.94\n",
+ " bald eagle 50 0.92 1\n",
+ " vulture 50 0.96 1\n",
+ " great grey owl 50 0.94 0.98\n",
+ " fire salamander 50 0.96 0.98\n",
+ " smooth newt 50 0.58 0.94\n",
+ " newt 50 0.74 0.9\n",
+ " spotted salamander 50 0.86 0.94\n",
+ " axolotl 50 0.86 0.96\n",
+ " American bullfrog 50 0.78 0.92\n",
+ " tree frog 50 0.84 0.96\n",
+ " tailed frog 50 0.48 0.8\n",
+ " loggerhead sea turtle 50 0.68 0.94\n",
+ " leatherback sea turtle 50 0.5 0.8\n",
+ " mud turtle 50 0.64 0.84\n",
+ " terrapin 50 0.52 0.98\n",
+ " box turtle 50 0.84 0.98\n",
+ " banded gecko 50 0.7 0.88\n",
+ " green iguana 50 0.76 0.94\n",
+ " Carolina anole 50 0.58 0.96\n",
+ "desert grassland whiptail lizard 50 0.82 0.94\n",
+ " agama 50 0.74 0.92\n",
+ " frilled-necked lizard 50 0.84 0.86\n",
+ " alligator lizard 50 0.58 0.78\n",
+ " Gila monster 50 0.72 0.8\n",
+ " European green lizard 50 0.42 0.9\n",
+ " chameleon 50 0.76 0.84\n",
+ " Komodo dragon 50 0.86 0.96\n",
+ " Nile crocodile 50 0.7 0.84\n",
+ " American alligator 50 0.76 0.96\n",
+ " triceratops 50 0.9 0.94\n",
+ " worm snake 50 0.76 0.88\n",
+ " ring-necked snake 50 0.8 0.92\n",
+ " eastern hog-nosed snake 50 0.58 0.88\n",
+ " smooth green snake 50 0.6 0.94\n",
+ " kingsnake 50 0.82 0.9\n",
+ " garter snake 50 0.88 0.94\n",
+ " water snake 50 0.7 0.94\n",
+ " vine snake 50 0.66 0.76\n",
+ " night snake 50 0.34 0.82\n",
+ " boa constrictor 50 0.8 0.96\n",
+ " African rock python 50 0.48 0.76\n",
+ " Indian cobra 50 0.82 0.94\n",
+ " green mamba 50 0.54 0.86\n",
+ " sea snake 50 0.62 0.9\n",
+ " Saharan horned viper 50 0.56 0.86\n",
+ "eastern diamondback rattlesnake 50 0.6 0.86\n",
+ " sidewinder 50 0.28 0.86\n",
+ " trilobite 50 0.98 0.98\n",
+ " harvestman 50 0.86 0.94\n",
+ " scorpion 50 0.86 0.94\n",
+ " yellow garden spider 50 0.92 0.96\n",
+ " barn spider 50 0.38 0.98\n",
+ " European garden spider 50 0.62 0.98\n",
+ " southern black widow 50 0.88 0.94\n",
+ " tarantula 50 0.94 1\n",
+ " wolf spider 50 0.82 0.92\n",
+ " tick 50 0.74 0.84\n",
+ " centipede 50 0.68 0.82\n",
+ " black grouse 50 0.88 0.98\n",
+ " ptarmigan 50 0.78 0.94\n",
+ " ruffed grouse 50 0.88 1\n",
+ " prairie grouse 50 0.92 1\n",
+ " peacock 50 0.88 0.9\n",
+ " quail 50 0.9 0.94\n",
+ " partridge 50 0.74 0.96\n",
+ " grey parrot 50 0.9 0.96\n",
+ " macaw 50 0.88 0.98\n",
+ "sulphur-crested cockatoo 50 0.86 0.92\n",
+ " lorikeet 50 0.96 1\n",
+ " coucal 50 0.82 0.88\n",
+ " bee eater 50 0.96 0.98\n",
+ " hornbill 50 0.9 0.96\n",
+ " hummingbird 50 0.88 0.96\n",
+ " jacamar 50 0.92 0.94\n",
+ " toucan 50 0.84 0.94\n",
+ " duck 50 0.76 0.94\n",
+ " red-breasted merganser 50 0.86 0.96\n",
+ " goose 50 0.74 0.96\n",
+ " black swan 50 0.94 0.98\n",
+ " tusker 50 0.54 0.92\n",
+ " echidna 50 0.98 1\n",
+ " platypus 50 0.72 0.84\n",
+ " wallaby 50 0.78 0.88\n",
+ " koala 50 0.84 0.92\n",
+ " wombat 50 0.78 0.84\n",
+ " jellyfish 50 0.88 0.96\n",
+ " sea anemone 50 0.72 0.9\n",
+ " brain coral 50 0.88 0.96\n",
+ " flatworm 50 0.8 0.98\n",
+ " nematode 50 0.86 0.9\n",
+ " conch 50 0.74 0.88\n",
+ " snail 50 0.78 0.88\n",
+ " slug 50 0.74 0.82\n",
+ " sea slug 50 0.88 0.98\n",
+ " chiton 50 0.88 0.98\n",
+ " chambered nautilus 50 0.88 0.92\n",
+ " Dungeness crab 50 0.78 0.94\n",
+ " rock crab 50 0.68 0.86\n",
+ " fiddler crab 50 0.64 0.86\n",
+ " red king crab 50 0.76 0.96\n",
+ " American lobster 50 0.78 0.96\n",
+ " spiny lobster 50 0.74 0.88\n",
+ " crayfish 50 0.56 0.86\n",
+ " hermit crab 50 0.78 0.96\n",
+ " isopod 50 0.66 0.78\n",
+ " white stork 50 0.88 0.96\n",
+ " black stork 50 0.84 0.98\n",
+ " spoonbill 50 0.96 1\n",
+ " flamingo 50 0.94 1\n",
+ " little blue heron 50 0.92 0.98\n",
+ " great egret 50 0.9 0.96\n",
+ " bittern 50 0.86 0.94\n",
+ " crane (bird) 50 0.62 0.9\n",
+ " limpkin 50 0.98 1\n",
+ " common gallinule 50 0.92 0.96\n",
+ " American coot 50 0.9 0.98\n",
+ " bustard 50 0.92 0.96\n",
+ " ruddy turnstone 50 0.94 1\n",
+ " dunlin 50 0.86 0.94\n",
+ " common redshank 50 0.9 0.96\n",
+ " dowitcher 50 0.84 0.96\n",
+ " oystercatcher 50 0.86 0.94\n",
+ " pelican 50 0.92 0.96\n",
+ " king penguin 50 0.88 0.96\n",
+ " albatross 50 0.9 1\n",
+ " grey whale 50 0.84 0.92\n",
+ " killer whale 50 0.92 1\n",
+ " dugong 50 0.84 0.96\n",
+ " sea lion 50 0.82 0.92\n",
+ " Chihuahua 50 0.66 0.84\n",
+ " Japanese Chin 50 0.72 0.98\n",
+ " Maltese 50 0.76 0.94\n",
+ " Pekingese 50 0.84 0.94\n",
+ " Shih Tzu 50 0.74 0.96\n",
+ " King Charles Spaniel 50 0.88 0.98\n",
+ " Papillon 50 0.86 0.94\n",
+ " toy terrier 50 0.48 0.94\n",
+ " Rhodesian Ridgeback 50 0.76 0.98\n",
+ " Afghan Hound 50 0.84 1\n",
+ " Basset Hound 50 0.8 0.92\n",
+ " Beagle 50 0.82 0.96\n",
+ " Bloodhound 50 0.48 0.72\n",
+ " Bluetick Coonhound 50 0.86 0.94\n",
+ " Black and Tan Coonhound 50 0.54 0.8\n",
+ "Treeing Walker Coonhound 50 0.66 0.98\n",
+ " English foxhound 50 0.32 0.84\n",
+ " Redbone Coonhound 50 0.62 0.94\n",
+ " borzoi 50 0.92 1\n",
+ " Irish Wolfhound 50 0.48 0.88\n",
+ " Italian Greyhound 50 0.76 0.98\n",
+ " Whippet 50 0.74 0.92\n",
+ " Ibizan Hound 50 0.6 0.86\n",
+ " Norwegian Elkhound 50 0.88 0.98\n",
+ " Otterhound 50 0.62 0.9\n",
+ " Saluki 50 0.72 0.92\n",
+ " Scottish Deerhound 50 0.86 0.98\n",
+ " Weimaraner 50 0.88 0.94\n",
+ "Staffordshire Bull Terrier 50 0.66 0.98\n",
+ "American Staffordshire Terrier 50 0.64 0.92\n",
+ " Bedlington Terrier 50 0.9 0.92\n",
+ " Border Terrier 50 0.86 0.92\n",
+ " Kerry Blue Terrier 50 0.78 0.98\n",
+ " Irish Terrier 50 0.7 0.96\n",
+ " Norfolk Terrier 50 0.68 0.9\n",
+ " Norwich Terrier 50 0.72 1\n",
+ " Yorkshire Terrier 50 0.66 0.9\n",
+ " Wire Fox Terrier 50 0.64 0.98\n",
+ " Lakeland Terrier 50 0.74 0.92\n",
+ " Sealyham Terrier 50 0.76 0.9\n",
+ " Airedale Terrier 50 0.82 0.92\n",
+ " Cairn Terrier 50 0.76 0.9\n",
+ " Australian Terrier 50 0.48 0.84\n",
+ " Dandie Dinmont Terrier 50 0.82 0.92\n",
+ " Boston Terrier 50 0.92 1\n",
+ " Miniature Schnauzer 50 0.68 0.9\n",
+ " Giant Schnauzer 50 0.72 0.98\n",
+ " Standard Schnauzer 50 0.74 1\n",
+ " Scottish Terrier 50 0.76 0.96\n",
+ " Tibetan Terrier 50 0.48 1\n",
+ "Australian Silky Terrier 50 0.66 0.96\n",
+ "Soft-coated Wheaten Terrier 50 0.74 0.96\n",
+ "West Highland White Terrier 50 0.88 0.96\n",
+ " Lhasa Apso 50 0.68 0.96\n",
+ " Flat-Coated Retriever 50 0.72 0.94\n",
+ " Curly-coated Retriever 50 0.82 0.94\n",
+ " Golden Retriever 50 0.86 0.94\n",
+ " Labrador Retriever 50 0.82 0.94\n",
+ "Chesapeake Bay Retriever 50 0.76 0.96\n",
+ "German Shorthaired Pointer 50 0.8 0.96\n",
+ " Vizsla 50 0.68 0.96\n",
+ " English Setter 50 0.7 1\n",
+ " Irish Setter 50 0.8 0.9\n",
+ " Gordon Setter 50 0.84 0.92\n",
+ " Brittany 50 0.84 0.96\n",
+ " Clumber Spaniel 50 0.92 0.96\n",
+ "English Springer Spaniel 50 0.88 1\n",
+ " Welsh Springer Spaniel 50 0.92 1\n",
+ " Cocker Spaniels 50 0.7 0.94\n",
+ " Sussex Spaniel 50 0.72 0.92\n",
+ " Irish Water Spaniel 50 0.88 0.98\n",
+ " Kuvasz 50 0.66 0.9\n",
+ " Schipperke 50 0.9 0.98\n",
+ " Groenendael 50 0.8 0.94\n",
+ " Malinois 50 0.86 0.98\n",
+ " Briard 50 0.52 0.8\n",
+ " Australian Kelpie 50 0.6 0.88\n",
+ " Komondor 50 0.88 0.94\n",
+ " Old English Sheepdog 50 0.94 0.98\n",
+ " Shetland Sheepdog 50 0.74 0.9\n",
+ " collie 50 0.6 0.96\n",
+ " Border Collie 50 0.74 0.96\n",
+ " Bouvier des Flandres 50 0.78 0.94\n",
+ " Rottweiler 50 0.88 0.96\n",
+ " German Shepherd Dog 50 0.8 0.98\n",
+ " Dobermann 50 0.68 0.96\n",
+ " Miniature Pinscher 50 0.76 0.88\n",
+ "Greater Swiss Mountain Dog 50 0.68 0.94\n",
+ " Bernese Mountain Dog 50 0.96 1\n",
+ " Appenzeller Sennenhund 50 0.22 1\n",
+ " Entlebucher Sennenhund 50 0.64 0.98\n",
+ " Boxer 50 0.7 0.92\n",
+ " Bullmastiff 50 0.78 0.98\n",
+ " Tibetan Mastiff 50 0.88 0.96\n",
+ " French Bulldog 50 0.84 0.94\n",
+ " Great Dane 50 0.54 0.9\n",
+ " St. Bernard 50 0.92 1\n",
+ " husky 50 0.46 0.98\n",
+ " Alaskan Malamute 50 0.76 0.96\n",
+ " Siberian Husky 50 0.46 0.98\n",
+ " Dalmatian 50 0.94 0.98\n",
+ " Affenpinscher 50 0.78 0.9\n",
+ " Basenji 50 0.92 0.94\n",
+ " pug 50 0.94 0.98\n",
+ " Leonberger 50 1 1\n",
+ " Newfoundland 50 0.78 0.96\n",
+ " Pyrenean Mountain Dog 50 0.78 0.96\n",
+ " Samoyed 50 0.96 1\n",
+ " Pomeranian 50 0.98 1\n",
+ " Chow Chow 50 0.9 0.96\n",
+ " Keeshond 50 0.88 0.94\n",
+ " Griffon Bruxellois 50 0.84 0.98\n",
+ " Pembroke Welsh Corgi 50 0.82 0.94\n",
+ " Cardigan Welsh Corgi 50 0.66 0.98\n",
+ " Toy Poodle 50 0.52 0.88\n",
+ " Miniature Poodle 50 0.52 0.92\n",
+ " Standard Poodle 50 0.8 1\n",
+ " Mexican hairless dog 50 0.88 0.98\n",
+ " grey wolf 50 0.82 0.92\n",
+ " Alaskan tundra wolf 50 0.78 0.98\n",
+ " red wolf 50 0.48 0.9\n",
+ " coyote 50 0.64 0.86\n",
+ " dingo 50 0.76 0.88\n",
+ " dhole 50 0.9 0.98\n",
+ " African wild dog 50 0.98 1\n",
+ " hyena 50 0.88 0.96\n",
+ " red fox 50 0.54 0.92\n",
+ " kit fox 50 0.72 0.98\n",
+ " Arctic fox 50 0.94 1\n",
+ " grey fox 50 0.7 0.94\n",
+ " tabby cat 50 0.54 0.92\n",
+ " tiger cat 50 0.22 0.94\n",
+ " Persian cat 50 0.9 0.98\n",
+ " Siamese cat 50 0.96 1\n",
+ " Egyptian Mau 50 0.54 0.8\n",
+ " cougar 50 0.9 1\n",
+ " lynx 50 0.72 0.88\n",
+ " leopard 50 0.78 0.98\n",
+ " snow leopard 50 0.9 0.98\n",
+ " jaguar 50 0.7 0.94\n",
+ " lion 50 0.9 0.98\n",
+ " tiger 50 0.92 0.98\n",
+ " cheetah 50 0.94 0.98\n",
+ " brown bear 50 0.94 0.98\n",
+ " American black bear 50 0.8 1\n",
+ " polar bear 50 0.84 0.96\n",
+ " sloth bear 50 0.72 0.92\n",
+ " mongoose 50 0.7 0.92\n",
+ " meerkat 50 0.82 0.92\n",
+ " tiger beetle 50 0.92 0.94\n",
+ " ladybug 50 0.86 0.94\n",
+ " ground beetle 50 0.64 0.94\n",
+ " longhorn beetle 50 0.62 0.88\n",
+ " leaf beetle 50 0.64 0.98\n",
+ " dung beetle 50 0.86 0.98\n",
+ " rhinoceros beetle 50 0.86 0.94\n",
+ " weevil 50 0.9 1\n",
+ " fly 50 0.78 0.94\n",
+ " bee 50 0.68 0.94\n",
+ " ant 50 0.68 0.78\n",
+ " grasshopper 50 0.5 0.92\n",
+ " cricket 50 0.64 0.92\n",
+ " stick insect 50 0.64 0.92\n",
+ " cockroach 50 0.72 0.8\n",
+ " mantis 50 0.64 0.86\n",
+ " cicada 50 0.9 0.96\n",
+ " leafhopper 50 0.88 0.94\n",
+ " lacewing 50 0.78 0.92\n",
+ " dragonfly 50 0.82 0.98\n",
+ " damselfly 50 0.82 1\n",
+ " red admiral 50 0.94 0.96\n",
+ " ringlet 50 0.86 0.98\n",
+ " monarch butterfly 50 0.9 0.92\n",
+ " small white 50 0.9 1\n",
+ " sulphur butterfly 50 0.92 1\n",
+ "gossamer-winged butterfly 50 0.88 1\n",
+ " starfish 50 0.88 0.92\n",
+ " sea urchin 50 0.84 0.94\n",
+ " sea cucumber 50 0.66 0.84\n",
+ " cottontail rabbit 50 0.72 0.94\n",
+ " hare 50 0.84 0.96\n",
+ " Angora rabbit 50 0.94 0.98\n",
+ " hamster 50 0.96 1\n",
+ " porcupine 50 0.88 0.98\n",
+ " fox squirrel 50 0.76 0.94\n",
+ " marmot 50 0.92 0.96\n",
+ " beaver 50 0.78 0.94\n",
+ " guinea pig 50 0.78 0.94\n",
+ " common sorrel 50 0.96 0.98\n",
+ " zebra 50 0.94 0.96\n",
+ " pig 50 0.5 0.76\n",
+ " wild boar 50 0.84 0.96\n",
+ " warthog 50 0.84 0.96\n",
+ " hippopotamus 50 0.88 0.96\n",
+ " ox 50 0.48 0.94\n",
+ " water buffalo 50 0.78 0.94\n",
+ " bison 50 0.88 0.96\n",
+ " ram 50 0.58 0.92\n",
+ " bighorn sheep 50 0.66 1\n",
+ " Alpine ibex 50 0.92 0.98\n",
+ " hartebeest 50 0.94 1\n",
+ " impala 50 0.82 0.96\n",
+ " gazelle 50 0.7 0.96\n",
+ " dromedary 50 0.9 1\n",
+ " llama 50 0.82 0.94\n",
+ " weasel 50 0.44 0.92\n",
+ " mink 50 0.78 0.96\n",
+ " European polecat 50 0.46 0.9\n",
+ " black-footed ferret 50 0.68 0.96\n",
+ " otter 50 0.66 0.88\n",
+ " skunk 50 0.96 0.96\n",
+ " badger 50 0.86 0.92\n",
+ " armadillo 50 0.88 0.9\n",
+ " three-toed sloth 50 0.96 1\n",
+ " orangutan 50 0.78 0.92\n",
+ " gorilla 50 0.82 0.94\n",
+ " chimpanzee 50 0.84 0.94\n",
+ " gibbon 50 0.76 0.86\n",
+ " siamang 50 0.68 0.94\n",
+ " guenon 50 0.8 0.94\n",
+ " patas monkey 50 0.62 0.82\n",
+ " baboon 50 0.9 0.98\n",
+ " macaque 50 0.8 0.86\n",
+ " langur 50 0.6 0.82\n",
+ " black-and-white colobus 50 0.86 0.9\n",
+ " proboscis monkey 50 1 1\n",
+ " marmoset 50 0.74 0.98\n",
+ " white-headed capuchin 50 0.72 0.9\n",
+ " howler monkey 50 0.86 0.94\n",
+ " titi 50 0.5 0.9\n",
+ "Geoffroy's spider monkey 50 0.42 0.8\n",
+ " common squirrel monkey 50 0.76 0.92\n",
+ " ring-tailed lemur 50 0.72 0.94\n",
+ " indri 50 0.9 0.96\n",
+ " Asian elephant 50 0.58 0.92\n",
+ " African bush elephant 50 0.7 0.98\n",
+ " red panda 50 0.94 0.94\n",
+ " giant panda 50 0.94 0.98\n",
+ " snoek 50 0.74 0.9\n",
+ " eel 50 0.6 0.84\n",
+ " coho salmon 50 0.84 0.96\n",
+ " rock beauty 50 0.88 0.98\n",
+ " clownfish 50 0.78 0.98\n",
+ " sturgeon 50 0.68 0.94\n",
+ " garfish 50 0.62 0.8\n",
+ " lionfish 50 0.96 0.96\n",
+ " pufferfish 50 0.88 0.96\n",
+ " abacus 50 0.74 0.88\n",
+ " abaya 50 0.84 0.92\n",
+ " academic gown 50 0.42 0.86\n",
+ " accordion 50 0.8 0.9\n",
+ " acoustic guitar 50 0.5 0.76\n",
+ " aircraft carrier 50 0.8 0.96\n",
+ " airliner 50 0.92 1\n",
+ " airship 50 0.76 0.82\n",
+ " altar 50 0.64 0.98\n",
+ " ambulance 50 0.88 0.98\n",
+ " amphibious vehicle 50 0.64 0.94\n",
+ " analog clock 50 0.52 0.92\n",
+ " apiary 50 0.82 0.96\n",
+ " apron 50 0.7 0.84\n",
+ " waste container 50 0.4 0.8\n",
+ " assault rifle 50 0.42 0.84\n",
+ " backpack 50 0.34 0.64\n",
+ " bakery 50 0.4 0.68\n",
+ " balance beam 50 0.8 0.98\n",
+ " balloon 50 0.86 0.96\n",
+ " ballpoint pen 50 0.52 0.96\n",
+ " Band-Aid 50 0.7 0.9\n",
+ " banjo 50 0.84 1\n",
+ " baluster 50 0.68 0.94\n",
+ " barbell 50 0.56 0.9\n",
+ " barber chair 50 0.7 0.92\n",
+ " barbershop 50 0.54 0.86\n",
+ " barn 50 0.96 0.96\n",
+ " barometer 50 0.84 0.98\n",
+ " barrel 50 0.56 0.88\n",
+ " wheelbarrow 50 0.66 0.88\n",
+ " baseball 50 0.74 0.98\n",
+ " basketball 50 0.88 0.98\n",
+ " bassinet 50 0.66 0.92\n",
+ " bassoon 50 0.74 0.98\n",
+ " swimming cap 50 0.62 0.88\n",
+ " bath towel 50 0.54 0.78\n",
+ " bathtub 50 0.4 0.88\n",
+ " station wagon 50 0.66 0.84\n",
+ " lighthouse 50 0.78 0.94\n",
+ " beaker 50 0.52 0.68\n",
+ " military cap 50 0.84 0.96\n",
+ " beer bottle 50 0.66 0.88\n",
+ " beer glass 50 0.6 0.84\n",
+ " bell-cot 50 0.56 0.96\n",
+ " bib 50 0.58 0.82\n",
+ " tandem bicycle 50 0.86 0.96\n",
+ " bikini 50 0.56 0.88\n",
+ " ring binder 50 0.64 0.84\n",
+ " binoculars 50 0.54 0.78\n",
+ " birdhouse 50 0.86 0.94\n",
+ " boathouse 50 0.74 0.92\n",
+ " bobsleigh 50 0.92 0.96\n",
+ " bolo tie 50 0.8 0.94\n",
+ " poke bonnet 50 0.64 0.86\n",
+ " bookcase 50 0.66 0.92\n",
+ " bookstore 50 0.62 0.88\n",
+ " bottle cap 50 0.58 0.7\n",
+ " bow 50 0.72 0.86\n",
+ " bow tie 50 0.7 0.9\n",
+ " brass 50 0.92 0.96\n",
+ " bra 50 0.5 0.7\n",
+ " breakwater 50 0.62 0.86\n",
+ " breastplate 50 0.4 0.9\n",
+ " broom 50 0.6 0.86\n",
+ " bucket 50 0.66 0.8\n",
+ " buckle 50 0.5 0.68\n",
+ " bulletproof vest 50 0.5 0.78\n",
+ " high-speed train 50 0.94 0.96\n",
+ " butcher shop 50 0.74 0.94\n",
+ " taxicab 50 0.64 0.86\n",
+ " cauldron 50 0.44 0.66\n",
+ " candle 50 0.48 0.74\n",
+ " cannon 50 0.88 0.94\n",
+ " canoe 50 0.94 1\n",
+ " can opener 50 0.66 0.86\n",
+ " cardigan 50 0.68 0.8\n",
+ " car mirror 50 0.94 0.96\n",
+ " carousel 50 0.94 0.98\n",
+ " tool kit 50 0.56 0.78\n",
+ " carton 50 0.42 0.7\n",
+ " car wheel 50 0.38 0.74\n",
+ "automated teller machine 50 0.76 0.94\n",
+ " cassette 50 0.52 0.8\n",
+ " cassette player 50 0.28 0.9\n",
+ " castle 50 0.78 0.88\n",
+ " catamaran 50 0.78 1\n",
+ " CD player 50 0.52 0.82\n",
+ " cello 50 0.82 1\n",
+ " mobile phone 50 0.68 0.86\n",
+ " chain 50 0.38 0.66\n",
+ " chain-link fence 50 0.7 0.84\n",
+ " chain mail 50 0.64 0.9\n",
+ " chainsaw 50 0.84 0.92\n",
+ " chest 50 0.68 0.92\n",
+ " chiffonier 50 0.26 0.64\n",
+ " chime 50 0.62 0.84\n",
+ " china cabinet 50 0.82 0.96\n",
+ " Christmas stocking 50 0.92 0.94\n",
+ " church 50 0.62 0.9\n",
+ " movie theater 50 0.58 0.88\n",
+ " cleaver 50 0.32 0.62\n",
+ " cliff dwelling 50 0.88 1\n",
+ " cloak 50 0.32 0.64\n",
+ " clogs 50 0.58 0.88\n",
+ " cocktail shaker 50 0.62 0.7\n",
+ " coffee mug 50 0.44 0.72\n",
+ " coffeemaker 50 0.64 0.92\n",
+ " coil 50 0.66 0.84\n",
+ " combination lock 50 0.64 0.84\n",
+ " computer keyboard 50 0.7 0.82\n",
+ " confectionery store 50 0.54 0.86\n",
+ " container ship 50 0.82 0.98\n",
+ " convertible 50 0.78 0.98\n",
+ " corkscrew 50 0.82 0.92\n",
+ " cornet 50 0.46 0.88\n",
+ " cowboy boot 50 0.64 0.8\n",
+ " cowboy hat 50 0.64 0.82\n",
+ " cradle 50 0.38 0.8\n",
+ " crane (machine) 50 0.78 0.94\n",
+ " crash helmet 50 0.92 0.96\n",
+ " crate 50 0.52 0.82\n",
+ " infant bed 50 0.74 1\n",
+ " Crock Pot 50 0.78 0.9\n",
+ " croquet ball 50 0.9 0.96\n",
+ " crutch 50 0.46 0.7\n",
+ " cuirass 50 0.54 0.86\n",
+ " dam 50 0.74 0.92\n",
+ " desk 50 0.6 0.86\n",
+ " desktop computer 50 0.54 0.94\n",
+ " rotary dial telephone 50 0.88 0.94\n",
+ " diaper 50 0.68 0.84\n",
+ " digital clock 50 0.54 0.76\n",
+ " digital watch 50 0.58 0.86\n",
+ " dining table 50 0.76 0.9\n",
+ " dishcloth 50 0.94 1\n",
+ " dishwasher 50 0.44 0.78\n",
+ " disc brake 50 0.98 1\n",
+ " dock 50 0.54 0.94\n",
+ " dog sled 50 0.84 1\n",
+ " dome 50 0.72 0.92\n",
+ " doormat 50 0.56 0.82\n",
+ " drilling rig 50 0.84 0.96\n",
+ " drum 50 0.38 0.68\n",
+ " drumstick 50 0.56 0.72\n",
+ " dumbbell 50 0.62 0.9\n",
+ " Dutch oven 50 0.7 0.84\n",
+ " electric fan 50 0.82 0.86\n",
+ " electric guitar 50 0.62 0.84\n",
+ " electric locomotive 50 0.92 0.98\n",
+ " entertainment center 50 0.9 0.98\n",
+ " envelope 50 0.44 0.86\n",
+ " espresso machine 50 0.72 0.94\n",
+ " face powder 50 0.7 0.92\n",
+ " feather boa 50 0.7 0.84\n",
+ " filing cabinet 50 0.88 0.98\n",
+ " fireboat 50 0.94 0.98\n",
+ " fire engine 50 0.84 0.9\n",
+ " fire screen sheet 50 0.62 0.76\n",
+ " flagpole 50 0.74 0.88\n",
+ " flute 50 0.36 0.72\n",
+ " folding chair 50 0.62 0.84\n",
+ " football helmet 50 0.86 0.94\n",
+ " forklift 50 0.8 0.92\n",
+ " fountain 50 0.84 0.94\n",
+ " fountain pen 50 0.76 0.92\n",
+ " four-poster bed 50 0.78 0.94\n",
+ " freight car 50 0.96 1\n",
+ " French horn 50 0.76 0.92\n",
+ " frying pan 50 0.36 0.78\n",
+ " fur coat 50 0.84 0.96\n",
+ " garbage truck 50 0.9 0.98\n",
+ " gas mask 50 0.84 0.92\n",
+ " gas pump 50 0.9 0.98\n",
+ " goblet 50 0.68 0.82\n",
+ " go-kart 50 0.9 1\n",
+ " golf ball 50 0.84 0.9\n",
+ " golf cart 50 0.78 0.86\n",
+ " gondola 50 0.98 0.98\n",
+ " gong 50 0.74 0.92\n",
+ " gown 50 0.62 0.96\n",
+ " grand piano 50 0.7 0.96\n",
+ " greenhouse 50 0.8 0.98\n",
+ " grille 50 0.72 0.9\n",
+ " grocery store 50 0.66 0.94\n",
+ " guillotine 50 0.86 0.92\n",
+ " barrette 50 0.52 0.66\n",
+ " hair spray 50 0.5 0.74\n",
+ " half-track 50 0.78 0.9\n",
+ " hammer 50 0.56 0.76\n",
+ " hamper 50 0.64 0.84\n",
+ " hair dryer 50 0.56 0.74\n",
+ " hand-held computer 50 0.42 0.86\n",
+ " handkerchief 50 0.78 0.94\n",
+ " hard disk drive 50 0.76 0.84\n",
+ " harmonica 50 0.7 0.88\n",
+ " harp 50 0.88 0.96\n",
+ " harvester 50 0.78 1\n",
+ " hatchet 50 0.54 0.74\n",
+ " holster 50 0.66 0.84\n",
+ " home theater 50 0.64 0.94\n",
+ " honeycomb 50 0.56 0.88\n",
+ " hook 50 0.3 0.6\n",
+ " hoop skirt 50 0.64 0.86\n",
+ " horizontal bar 50 0.68 0.98\n",
+ " horse-drawn vehicle 50 0.88 0.94\n",
+ " hourglass 50 0.88 0.96\n",
+ " iPod 50 0.76 0.94\n",
+ " clothes iron 50 0.82 0.88\n",
+ " jack-o'-lantern 50 0.98 0.98\n",
+ " jeans 50 0.68 0.84\n",
+ " jeep 50 0.72 0.9\n",
+ " T-shirt 50 0.72 0.96\n",
+ " jigsaw puzzle 50 0.84 0.94\n",
+ " pulled rickshaw 50 0.86 0.94\n",
+ " joystick 50 0.8 0.9\n",
+ " kimono 50 0.84 0.96\n",
+ " knee pad 50 0.62 0.88\n",
+ " knot 50 0.66 0.8\n",
+ " lab coat 50 0.8 0.96\n",
+ " ladle 50 0.36 0.64\n",
+ " lampshade 50 0.48 0.84\n",
+ " laptop computer 50 0.26 0.88\n",
+ " lawn mower 50 0.78 0.96\n",
+ " lens cap 50 0.46 0.72\n",
+ " paper knife 50 0.26 0.5\n",
+ " library 50 0.54 0.9\n",
+ " lifeboat 50 0.92 0.98\n",
+ " lighter 50 0.56 0.78\n",
+ " limousine 50 0.76 0.92\n",
+ " ocean liner 50 0.88 0.94\n",
+ " lipstick 50 0.74 0.9\n",
+ " slip-on shoe 50 0.74 0.92\n",
+ " lotion 50 0.5 0.86\n",
+ " speaker 50 0.52 0.68\n",
+ " loupe 50 0.32 0.52\n",
+ " sawmill 50 0.72 0.9\n",
+ " magnetic compass 50 0.52 0.82\n",
+ " mail bag 50 0.68 0.92\n",
+ " mailbox 50 0.82 0.92\n",
+ " tights 50 0.22 0.94\n",
+ " tank suit 50 0.24 0.9\n",
+ " manhole cover 50 0.96 0.98\n",
+ " maraca 50 0.74 0.9\n",
+ " marimba 50 0.84 0.94\n",
+ " mask 50 0.44 0.82\n",
+ " match 50 0.66 0.9\n",
+ " maypole 50 0.96 1\n",
+ " maze 50 0.8 0.96\n",
+ " measuring cup 50 0.54 0.76\n",
+ " medicine chest 50 0.6 0.84\n",
+ " megalith 50 0.8 0.92\n",
+ " microphone 50 0.52 0.7\n",
+ " microwave oven 50 0.48 0.72\n",
+ " military uniform 50 0.62 0.84\n",
+ " milk can 50 0.68 0.82\n",
+ " minibus 50 0.7 1\n",
+ " miniskirt 50 0.46 0.76\n",
+ " minivan 50 0.38 0.8\n",
+ " missile 50 0.4 0.84\n",
+ " mitten 50 0.76 0.88\n",
+ " mixing bowl 50 0.8 0.92\n",
+ " mobile home 50 0.54 0.78\n",
+ " Model T 50 0.92 0.96\n",
+ " modem 50 0.58 0.86\n",
+ " monastery 50 0.44 0.9\n",
+ " monitor 50 0.4 0.86\n",
+ " moped 50 0.56 0.94\n",
+ " mortar 50 0.68 0.94\n",
+ " square academic cap 50 0.5 0.84\n",
+ " mosque 50 0.9 1\n",
+ " mosquito net 50 0.9 0.98\n",
+ " scooter 50 0.9 0.98\n",
+ " mountain bike 50 0.78 0.96\n",
+ " tent 50 0.88 0.96\n",
+ " computer mouse 50 0.42 0.82\n",
+ " mousetrap 50 0.76 0.88\n",
+ " moving van 50 0.4 0.72\n",
+ " muzzle 50 0.5 0.72\n",
+ " nail 50 0.68 0.74\n",
+ " neck brace 50 0.56 0.68\n",
+ " necklace 50 0.86 1\n",
+ " nipple 50 0.7 0.88\n",
+ " notebook computer 50 0.34 0.84\n",
+ " obelisk 50 0.8 0.92\n",
+ " oboe 50 0.6 0.84\n",
+ " ocarina 50 0.8 0.86\n",
+ " odometer 50 0.96 1\n",
+ " oil filter 50 0.58 0.82\n",
+ " organ 50 0.82 0.9\n",
+ " oscilloscope 50 0.9 0.96\n",
+ " overskirt 50 0.2 0.7\n",
+ " bullock cart 50 0.7 0.94\n",
+ " oxygen mask 50 0.46 0.84\n",
+ " packet 50 0.5 0.78\n",
+ " paddle 50 0.56 0.94\n",
+ " paddle wheel 50 0.86 0.96\n",
+ " padlock 50 0.74 0.78\n",
+ " paintbrush 50 0.62 0.8\n",
+ " pajamas 50 0.56 0.92\n",
+ " palace 50 0.64 0.96\n",
+ " pan flute 50 0.84 0.86\n",
+ " paper towel 50 0.66 0.84\n",
+ " parachute 50 0.92 0.94\n",
+ " parallel bars 50 0.62 0.96\n",
+ " park bench 50 0.74 0.9\n",
+ " parking meter 50 0.84 0.92\n",
+ " passenger car 50 0.5 0.82\n",
+ " patio 50 0.58 0.84\n",
+ " payphone 50 0.74 0.92\n",
+ " pedestal 50 0.52 0.9\n",
+ " pencil case 50 0.64 0.92\n",
+ " pencil sharpener 50 0.52 0.78\n",
+ " perfume 50 0.7 0.9\n",
+ " Petri dish 50 0.6 0.8\n",
+ " photocopier 50 0.88 0.98\n",
+ " plectrum 50 0.7 0.84\n",
+ " Pickelhaube 50 0.72 0.86\n",
+ " picket fence 50 0.84 0.94\n",
+ " pickup truck 50 0.64 0.92\n",
+ " pier 50 0.52 0.82\n",
+ " piggy bank 50 0.82 0.94\n",
+ " pill bottle 50 0.76 0.86\n",
+ " pillow 50 0.76 0.9\n",
+ " ping-pong ball 50 0.84 0.88\n",
+ " pinwheel 50 0.76 0.88\n",
+ " pirate ship 50 0.76 0.94\n",
+ " pitcher 50 0.46 0.84\n",
+ " hand plane 50 0.84 0.94\n",
+ " planetarium 50 0.88 0.98\n",
+ " plastic bag 50 0.36 0.62\n",
+ " plate rack 50 0.52 0.78\n",
+ " plow 50 0.78 0.88\n",
+ " plunger 50 0.42 0.7\n",
+ " Polaroid camera 50 0.84 0.92\n",
+ " pole 50 0.38 0.74\n",
+ " police van 50 0.76 0.94\n",
+ " poncho 50 0.58 0.86\n",
+ " billiard table 50 0.8 0.88\n",
+ " soda bottle 50 0.56 0.94\n",
+ " pot 50 0.78 0.92\n",
+ " potter's wheel 50 0.9 0.94\n",
+ " power drill 50 0.42 0.72\n",
+ " prayer rug 50 0.7 0.86\n",
+ " printer 50 0.54 0.86\n",
+ " prison 50 0.7 0.9\n",
+ " projectile 50 0.28 0.9\n",
+ " projector 50 0.62 0.84\n",
+ " hockey puck 50 0.92 0.96\n",
+ " punching bag 50 0.6 0.68\n",
+ " purse 50 0.42 0.78\n",
+ " quill 50 0.68 0.84\n",
+ " quilt 50 0.64 0.9\n",
+ " race car 50 0.72 0.92\n",
+ " racket 50 0.72 0.9\n",
+ " radiator 50 0.66 0.76\n",
+ " radio 50 0.64 0.92\n",
+ " radio telescope 50 0.9 0.96\n",
+ " rain barrel 50 0.8 0.98\n",
+ " recreational vehicle 50 0.84 0.94\n",
+ " reel 50 0.72 0.82\n",
+ " reflex camera 50 0.72 0.92\n",
+ " refrigerator 50 0.7 0.9\n",
+ " remote control 50 0.7 0.88\n",
+ " restaurant 50 0.5 0.66\n",
+ " revolver 50 0.82 1\n",
+ " rifle 50 0.38 0.7\n",
+ " rocking chair 50 0.62 0.84\n",
+ " rotisserie 50 0.88 0.92\n",
+ " eraser 50 0.54 0.76\n",
+ " rugby ball 50 0.86 0.94\n",
+ " ruler 50 0.68 0.86\n",
+ " running shoe 50 0.78 0.94\n",
+ " safe 50 0.82 0.92\n",
+ " safety pin 50 0.4 0.62\n",
+ " salt shaker 50 0.66 0.9\n",
+ " sandal 50 0.66 0.86\n",
+ " sarong 50 0.64 0.86\n",
+ " saxophone 50 0.66 0.88\n",
+ " scabbard 50 0.76 0.92\n",
+ " weighing scale 50 0.58 0.78\n",
+ " school bus 50 0.92 1\n",
+ " schooner 50 0.84 1\n",
+ " scoreboard 50 0.9 0.96\n",
+ " CRT screen 50 0.14 0.7\n",
+ " screw 50 0.9 0.98\n",
+ " screwdriver 50 0.3 0.58\n",
+ " seat belt 50 0.88 0.94\n",
+ " sewing machine 50 0.76 0.9\n",
+ " shield 50 0.56 0.82\n",
+ " shoe store 50 0.78 0.96\n",
+ " shoji 50 0.8 0.92\n",
+ " shopping basket 50 0.52 0.88\n",
+ " shopping cart 50 0.76 0.92\n",
+ " shovel 50 0.62 0.84\n",
+ " shower cap 50 0.7 0.84\n",
+ " shower curtain 50 0.64 0.82\n",
+ " ski 50 0.74 0.92\n",
+ " ski mask 50 0.72 0.88\n",
+ " sleeping bag 50 0.68 0.8\n",
+ " slide rule 50 0.72 0.88\n",
+ " sliding door 50 0.44 0.78\n",
+ " slot machine 50 0.94 0.98\n",
+ " snorkel 50 0.86 0.98\n",
+ " snowmobile 50 0.88 1\n",
+ " snowplow 50 0.84 0.98\n",
+ " soap dispenser 50 0.56 0.86\n",
+ " soccer ball 50 0.86 0.96\n",
+ " sock 50 0.62 0.76\n",
+ " solar thermal collector 50 0.72 0.96\n",
+ " sombrero 50 0.6 0.84\n",
+ " soup bowl 50 0.56 0.94\n",
+ " space bar 50 0.34 0.88\n",
+ " space heater 50 0.52 0.74\n",
+ " space shuttle 50 0.82 0.96\n",
+ " spatula 50 0.3 0.6\n",
+ " motorboat 50 0.86 1\n",
+ " spider web 50 0.7 0.9\n",
+ " spindle 50 0.86 0.98\n",
+ " sports car 50 0.6 0.94\n",
+ " spotlight 50 0.26 0.6\n",
+ " stage 50 0.68 0.86\n",
+ " steam locomotive 50 0.94 1\n",
+ " through arch bridge 50 0.84 0.96\n",
+ " steel drum 50 0.82 0.9\n",
+ " stethoscope 50 0.6 0.82\n",
+ " scarf 50 0.5 0.92\n",
+ " stone wall 50 0.76 0.9\n",
+ " stopwatch 50 0.58 0.9\n",
+ " stove 50 0.46 0.74\n",
+ " strainer 50 0.64 0.84\n",
+ " tram 50 0.88 0.96\n",
+ " stretcher 50 0.6 0.8\n",
+ " couch 50 0.8 0.96\n",
+ " stupa 50 0.88 0.88\n",
+ " submarine 50 0.72 0.92\n",
+ " suit 50 0.4 0.78\n",
+ " sundial 50 0.58 0.74\n",
+ " sunglass 50 0.14 0.58\n",
+ " sunglasses 50 0.28 0.58\n",
+ " sunscreen 50 0.32 0.7\n",
+ " suspension bridge 50 0.6 0.94\n",
+ " mop 50 0.74 0.92\n",
+ " sweatshirt 50 0.28 0.66\n",
+ " swimsuit 50 0.52 0.82\n",
+ " swing 50 0.76 0.84\n",
+ " switch 50 0.56 0.76\n",
+ " syringe 50 0.62 0.82\n",
+ " table lamp 50 0.6 0.88\n",
+ " tank 50 0.8 0.96\n",
+ " tape player 50 0.46 0.76\n",
+ " teapot 50 0.84 1\n",
+ " teddy bear 50 0.82 0.94\n",
+ " television 50 0.6 0.9\n",
+ " tennis ball 50 0.7 0.94\n",
+ " thatched roof 50 0.88 0.9\n",
+ " front curtain 50 0.8 0.92\n",
+ " thimble 50 0.6 0.8\n",
+ " threshing machine 50 0.56 0.88\n",
+ " throne 50 0.72 0.82\n",
+ " tile roof 50 0.72 0.94\n",
+ " toaster 50 0.66 0.84\n",
+ " tobacco shop 50 0.42 0.7\n",
+ " toilet seat 50 0.62 0.88\n",
+ " torch 50 0.64 0.84\n",
+ " totem pole 50 0.92 0.98\n",
+ " tow truck 50 0.62 0.88\n",
+ " toy store 50 0.6 0.94\n",
+ " tractor 50 0.76 0.98\n",
+ " semi-trailer truck 50 0.78 0.92\n",
+ " tray 50 0.46 0.64\n",
+ " trench coat 50 0.54 0.72\n",
+ " tricycle 50 0.72 0.94\n",
+ " trimaran 50 0.7 0.98\n",
+ " tripod 50 0.58 0.86\n",
+ " triumphal arch 50 0.92 0.98\n",
+ " trolleybus 50 0.9 1\n",
+ " trombone 50 0.54 0.88\n",
+ " tub 50 0.24 0.82\n",
+ " turnstile 50 0.84 0.94\n",
+ " typewriter keyboard 50 0.68 0.98\n",
+ " umbrella 50 0.52 0.7\n",
+ " unicycle 50 0.74 0.96\n",
+ " upright piano 50 0.76 0.9\n",
+ " vacuum cleaner 50 0.62 0.9\n",
+ " vase 50 0.5 0.78\n",
+ " vault 50 0.76 0.92\n",
+ " velvet 50 0.2 0.42\n",
+ " vending machine 50 0.9 1\n",
+ " vestment 50 0.54 0.82\n",
+ " viaduct 50 0.78 0.86\n",
+ " violin 50 0.68 0.78\n",
+ " volleyball 50 0.86 1\n",
+ " waffle iron 50 0.72 0.88\n",
+ " wall clock 50 0.54 0.88\n",
+ " wallet 50 0.52 0.9\n",
+ " wardrobe 50 0.68 0.88\n",
+ " military aircraft 50 0.9 0.98\n",
+ " sink 50 0.72 0.96\n",
+ " washing machine 50 0.78 0.94\n",
+ " water bottle 50 0.54 0.74\n",
+ " water jug 50 0.22 0.74\n",
+ " water tower 50 0.9 0.96\n",
+ " whiskey jug 50 0.64 0.74\n",
+ " whistle 50 0.72 0.84\n",
+ " wig 50 0.84 0.9\n",
+ " window screen 50 0.68 0.8\n",
+ " window shade 50 0.52 0.76\n",
+ " Windsor tie 50 0.22 0.66\n",
+ " wine bottle 50 0.42 0.82\n",
+ " wing 50 0.54 0.96\n",
+ " wok 50 0.46 0.82\n",
+ " wooden spoon 50 0.58 0.8\n",
+ " wool 50 0.32 0.82\n",
+ " split-rail fence 50 0.74 0.9\n",
+ " shipwreck 50 0.84 0.96\n",
+ " yawl 50 0.78 0.96\n",
+ " yurt 50 0.84 1\n",
+ " website 50 0.98 1\n",
+ " comic book 50 0.62 0.9\n",
+ " crossword 50 0.84 0.88\n",
+ " traffic sign 50 0.78 0.9\n",
+ " traffic light 50 0.8 0.94\n",
+ " dust jacket 50 0.72 0.94\n",
+ " menu 50 0.82 0.96\n",
+ " plate 50 0.44 0.88\n",
+ " guacamole 50 0.8 0.92\n",
+ " consomme 50 0.54 0.88\n",
+ " hot pot 50 0.86 0.98\n",
+ " trifle 50 0.92 0.98\n",
+ " ice cream 50 0.68 0.94\n",
+ " ice pop 50 0.62 0.84\n",
+ " baguette 50 0.62 0.88\n",
+ " bagel 50 0.64 0.92\n",
+ " pretzel 50 0.72 0.88\n",
+ " cheeseburger 50 0.9 1\n",
+ " hot dog 50 0.74 0.94\n",
+ " mashed potato 50 0.74 0.9\n",
+ " cabbage 50 0.84 0.96\n",
+ " broccoli 50 0.9 0.96\n",
+ " cauliflower 50 0.82 1\n",
+ " zucchini 50 0.74 0.9\n",
+ " spaghetti squash 50 0.8 0.96\n",
+ " acorn squash 50 0.82 0.96\n",
+ " butternut squash 50 0.7 0.94\n",
+ " cucumber 50 0.6 0.96\n",
+ " artichoke 50 0.84 0.94\n",
+ " bell pepper 50 0.84 0.98\n",
+ " cardoon 50 0.88 0.94\n",
+ " mushroom 50 0.38 0.92\n",
+ " Granny Smith 50 0.9 0.96\n",
+ " strawberry 50 0.6 0.88\n",
+ " orange 50 0.7 0.92\n",
+ " lemon 50 0.78 0.98\n",
+ " fig 50 0.82 0.96\n",
+ " pineapple 50 0.86 0.96\n",
+ " banana 50 0.84 0.96\n",
+ " jackfruit 50 0.9 0.98\n",
+ " custard apple 50 0.86 0.96\n",
+ " pomegranate 50 0.82 0.98\n",
+ " hay 50 0.8 0.92\n",
+ " carbonara 50 0.88 0.94\n",
+ " chocolate syrup 50 0.46 0.84\n",
+ " dough 50 0.4 0.6\n",
+ " meatloaf 50 0.58 0.84\n",
+ " pizza 50 0.84 0.96\n",
+ " pot pie 50 0.68 0.9\n",
+ " burrito 50 0.8 0.98\n",
+ " red wine 50 0.54 0.82\n",
+ " espresso 50 0.64 0.88\n",
+ " cup 50 0.38 0.7\n",
+ " eggnog 50 0.38 0.7\n",
+ " alp 50 0.54 0.88\n",
+ " bubble 50 0.8 0.96\n",
+ " cliff 50 0.64 1\n",
+ " coral reef 50 0.72 0.96\n",
+ " geyser 50 0.94 1\n",
+ " lakeshore 50 0.54 0.88\n",
+ " promontory 50 0.58 0.94\n",
+ " shoal 50 0.6 0.96\n",
+ " seashore 50 0.44 0.78\n",
+ " valley 50 0.72 0.94\n",
+ " volcano 50 0.78 0.96\n",
+ " baseball player 50 0.72 0.94\n",
+ " bridegroom 50 0.72 0.88\n",
+ " scuba diver 50 0.8 1\n",
+ " rapeseed 50 0.94 0.98\n",
+ " daisy 50 0.96 0.98\n",
+ " yellow lady's slipper 50 1 1\n",
+ " corn 50 0.4 0.88\n",
+ " acorn 50 0.92 0.98\n",
+ " rose hip 50 0.92 0.98\n",
+ " horse chestnut seed 50 0.94 0.98\n",
+ " coral fungus 50 0.96 0.96\n",
+ " agaric 50 0.82 0.94\n",
+ " gyromitra 50 0.98 1\n",
+ " stinkhorn mushroom 50 0.8 0.94\n",
+ " earth star 50 0.98 1\n",
+ " hen-of-the-woods 50 0.8 0.96\n",
+ " bolete 50 0.74 0.94\n",
+ " ear 50 0.48 0.94\n",
+ " toilet paper 50 0.36 0.68\n",
+ "Speed: 0.1ms pre-process, 0.3ms inference, 0.0ms post-process per image at shape (1, 3, 224, 224)\n",
+ "Results saved to \u001b[1mruns/val-cls/exp\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Validate YOLOv5s on Imagenet val\n",
+ "!python classify/val.py --weights yolov5s-cls.pt --data ../datasets/imagenet --img 224 --half"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "ZY2VXXXu74w5"
+ },
+ "source": [
+ "# 3. Train\n",
+ "\n",
+ "

 "
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Lay2WsTjNJzP"
+ },
+ "source": [
+ "## ClearML Logging and Automation 🌟 NEW\n",
+ "\n",
+ "[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
+ "\n",
+ "- `pip install clearml`\n",
+ "- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
+ "\n",
+ "You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
+ "\n",
+ "You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/clearml) for details!\n",
+ "\n",
+ "\n",
+ "
"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Lay2WsTjNJzP"
+ },
+ "source": [
+ "## ClearML Logging and Automation 🌟 NEW\n",
+ "\n",
+ "[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
+ "\n",
+ "- `pip install clearml`\n",
+ "- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
+ "\n",
+ "You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
+ "\n",
+ "You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/clearml) for details!\n",
+ "\n",
+ "\n",
+ " "
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "-WPvRbS5Swl6"
+ },
+ "source": [
+ "## Local Logging\n",
+ "\n",
+ "Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
+ "\n",
+ "This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
+ "\n",
+ "
"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "-WPvRbS5Swl6"
+ },
+ "source": [
+ "## Local Logging\n",
+ "\n",
+ "Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
+ "\n",
+ "This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
+ "\n",
+ " \n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Zelyeqbyt3GD"
+ },
+ "source": [
+ "# Environments\n",
+ "\n",
+ "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "\n",
+ "- **Notebooks** with free GPU: \n",
+ "- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
+ "- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
+ "- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Zelyeqbyt3GD"
+ },
+ "source": [
+ "# Environments\n",
+ "\n",
+ "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "\n",
+ "- **Notebooks** with free GPU: \n",
+ "- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
+ "- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
+ "- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  \n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "6Qu7Iesl0p54"
+ },
+ "source": [
+ "# Status\n",
+ "\n",
+ "\n",
+ "\n",
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "IEijrePND_2I"
+ },
+ "source": [
+ "# Appendix\n",
+ "\n",
+ "Additional content below."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "GMusP4OAxFu6"
+ },
+ "outputs": [],
+ "source": [
+ "# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
+ "import torch\n",
+ "\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # yolov5n - yolov5x6 or custom\n",
+ "im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
+ "results = model(im) # inference\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
+ ]
+ }
+ ],
+ "metadata": {
+ "accelerator": "GPU",
+ "colab": {
+ "name": "YOLOv5 Classification Tutorial",
+ "provenance": []
+ },
+ "kernelspec": {
+ "display_name": "Python 3 (ipykernel)",
+ "language": "python",
+ "name": "python3"
+ },
+ "language_info": {
+ "codemirror_mode": {
+ "name": "ipython",
+ "version": 3
+ },
+ "file_extension": ".py",
+ "mimetype": "text/x-python",
+ "name": "python",
+ "nbconvert_exporter": "python",
+ "pygments_lexer": "ipython3",
+ "version": "3.7.12"
+ }
+ },
+ "nbformat": 4,
+ "nbformat_minor": 0
+}
\ No newline at end of file
diff --git a/classify/val.py b/classify/val.py
new file mode 100644
index 000000000000..8657036fb2a2
--- /dev/null
+++ b/classify/val.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 classification model on a classification dataset
+
+Usage:
+ $ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
+ $ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
+
+Usage - formats:
+ $ python classify/val.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls_openvino_model # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s-cls_paddle_model # PaddlePaddle
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (LOGGER, TQDM_BAR_FORMAT, Profile, check_img_size, check_requirements, colorstr,
+ increment_path, print_args)
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / '../datasets/mnist', # dataset dir
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ batch_size=128, # batch size
+ imgsz=224, # inference size (pixels)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ verbose=False, # verbose output
+ project=ROOT / 'runs/val-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ criterion=None,
+ pbar=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Dataloader
+ data = Path(data)
+ test_dir = data / 'test' if (data / 'test').exists() else data / 'val' # data/test or data/val
+ dataloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=batch_size,
+ augment=False,
+ rank=-1,
+ workers=workers)
+
+ model.eval()
+ pred, targets, loss, dt = [], [], 0, (Profile(), Profile(), Profile())
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
+ bar = tqdm(dataloader, desc, n, not training, bar_format=TQDM_BAR_FORMAT, position=0)
+ with torch.cuda.amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ with dt[0]:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ with dt[1]:
+ y = model(images)
+
+ with dt[2]:
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in model.names.items():
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>24}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ # Print results
+ t = tuple(x.t / len(dataloader.dataset.samples) * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+
+ return top1, top5, loss
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=128, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
+ parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/data/Argoverse.yaml b/data/Argoverse.yaml
index 9d21296e3291..558151dc849e 100644
--- a/data/Argoverse.yaml
+++ b/data/Argoverse.yaml
@@ -14,8 +14,15 @@ val: Argoverse-1.1/images/val/ # val images (relative to 'path') 15062 images
test: Argoverse-1.1/images/test/ # test images (optional) https://eval.ai/web/challenges/challenge-page/800/overview
# Classes
-nc: 8 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'bus', 'truck', 'traffic_light', 'stop_sign'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: bus
+ 5: truck
+ 6: traffic_light
+ 7: stop_sign
# Download script/URL (optional) ---------------------------------------------------------------------------------------
@@ -56,7 +63,7 @@ download: |
# Download
- dir = Path('../datasets/Argoverse') # dataset root dir
+ dir = Path(yaml['path']) # dataset root dir
urls = ['https://argoverse-hd.s3.us-east-2.amazonaws.com/Argoverse-HD-Full.zip']
download(urls, dir=dir, delete=False)
diff --git a/data/GlobalWheat2020.yaml b/data/GlobalWheat2020.yaml
index 4c43693f1d82..01812d031bc5 100644
--- a/data/GlobalWheat2020.yaml
+++ b/data/GlobalWheat2020.yaml
@@ -26,8 +26,8 @@ test: # test images (optional) 1276 images
- images/uq_1
# Classes
-nc: 1 # number of classes
-names: ['wheat_head'] # class names
+names:
+ 0: wheat_head
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/ImageNet.yaml b/data/ImageNet.yaml
new file mode 100644
index 000000000000..14f12950605f
--- /dev/null
+++ b/data/ImageNet.yaml
@@ -0,0 +1,1022 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
+# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
+# Example usage: python classify/train.py --data imagenet
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here (144 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/imagenet # dataset root dir
+train: train # train images (relative to 'path') 1281167 images
+val: val # val images (relative to 'path') 50000 images
+test: # test images (optional)
+
+# Classes
+names:
+ 0: tench
+ 1: goldfish
+ 2: great white shark
+ 3: tiger shark
+ 4: hammerhead shark
+ 5: electric ray
+ 6: stingray
+ 7: cock
+ 8: hen
+ 9: ostrich
+ 10: brambling
+ 11: goldfinch
+ 12: house finch
+ 13: junco
+ 14: indigo bunting
+ 15: American robin
+ 16: bulbul
+ 17: jay
+ 18: magpie
+ 19: chickadee
+ 20: American dipper
+ 21: kite
+ 22: bald eagle
+ 23: vulture
+ 24: great grey owl
+ 25: fire salamander
+ 26: smooth newt
+ 27: newt
+ 28: spotted salamander
+ 29: axolotl
+ 30: American bullfrog
+ 31: tree frog
+ 32: tailed frog
+ 33: loggerhead sea turtle
+ 34: leatherback sea turtle
+ 35: mud turtle
+ 36: terrapin
+ 37: box turtle
+ 38: banded gecko
+ 39: green iguana
+ 40: Carolina anole
+ 41: desert grassland whiptail lizard
+ 42: agama
+ 43: frilled-necked lizard
+ 44: alligator lizard
+ 45: Gila monster
+ 46: European green lizard
+ 47: chameleon
+ 48: Komodo dragon
+ 49: Nile crocodile
+ 50: American alligator
+ 51: triceratops
+ 52: worm snake
+ 53: ring-necked snake
+ 54: eastern hog-nosed snake
+ 55: smooth green snake
+ 56: kingsnake
+ 57: garter snake
+ 58: water snake
+ 59: vine snake
+ 60: night snake
+ 61: boa constrictor
+ 62: African rock python
+ 63: Indian cobra
+ 64: green mamba
+ 65: sea snake
+ 66: Saharan horned viper
+ 67: eastern diamondback rattlesnake
+ 68: sidewinder
+ 69: trilobite
+ 70: harvestman
+ 71: scorpion
+ 72: yellow garden spider
+ 73: barn spider
+ 74: European garden spider
+ 75: southern black widow
+ 76: tarantula
+ 77: wolf spider
+ 78: tick
+ 79: centipede
+ 80: black grouse
+ 81: ptarmigan
+ 82: ruffed grouse
+ 83: prairie grouse
+ 84: peacock
+ 85: quail
+ 86: partridge
+ 87: grey parrot
+ 88: macaw
+ 89: sulphur-crested cockatoo
+ 90: lorikeet
+ 91: coucal
+ 92: bee eater
+ 93: hornbill
+ 94: hummingbird
+ 95: jacamar
+ 96: toucan
+ 97: duck
+ 98: red-breasted merganser
+ 99: goose
+ 100: black swan
+ 101: tusker
+ 102: echidna
+ 103: platypus
+ 104: wallaby
+ 105: koala
+ 106: wombat
+ 107: jellyfish
+ 108: sea anemone
+ 109: brain coral
+ 110: flatworm
+ 111: nematode
+ 112: conch
+ 113: snail
+ 114: slug
+ 115: sea slug
+ 116: chiton
+ 117: chambered nautilus
+ 118: Dungeness crab
+ 119: rock crab
+ 120: fiddler crab
+ 121: red king crab
+ 122: American lobster
+ 123: spiny lobster
+ 124: crayfish
+ 125: hermit crab
+ 126: isopod
+ 127: white stork
+ 128: black stork
+ 129: spoonbill
+ 130: flamingo
+ 131: little blue heron
+ 132: great egret
+ 133: bittern
+ 134: crane (bird)
+ 135: limpkin
+ 136: common gallinule
+ 137: American coot
+ 138: bustard
+ 139: ruddy turnstone
+ 140: dunlin
+ 141: common redshank
+ 142: dowitcher
+ 143: oystercatcher
+ 144: pelican
+ 145: king penguin
+ 146: albatross
+ 147: grey whale
+ 148: killer whale
+ 149: dugong
+ 150: sea lion
+ 151: Chihuahua
+ 152: Japanese Chin
+ 153: Maltese
+ 154: Pekingese
+ 155: Shih Tzu
+ 156: King Charles Spaniel
+ 157: Papillon
+ 158: toy terrier
+ 159: Rhodesian Ridgeback
+ 160: Afghan Hound
+ 161: Basset Hound
+ 162: Beagle
+ 163: Bloodhound
+ 164: Bluetick Coonhound
+ 165: Black and Tan Coonhound
+ 166: Treeing Walker Coonhound
+ 167: English foxhound
+ 168: Redbone Coonhound
+ 169: borzoi
+ 170: Irish Wolfhound
+ 171: Italian Greyhound
+ 172: Whippet
+ 173: Ibizan Hound
+ 174: Norwegian Elkhound
+ 175: Otterhound
+ 176: Saluki
+ 177: Scottish Deerhound
+ 178: Weimaraner
+ 179: Staffordshire Bull Terrier
+ 180: American Staffordshire Terrier
+ 181: Bedlington Terrier
+ 182: Border Terrier
+ 183: Kerry Blue Terrier
+ 184: Irish Terrier
+ 185: Norfolk Terrier
+ 186: Norwich Terrier
+ 187: Yorkshire Terrier
+ 188: Wire Fox Terrier
+ 189: Lakeland Terrier
+ 190: Sealyham Terrier
+ 191: Airedale Terrier
+ 192: Cairn Terrier
+ 193: Australian Terrier
+ 194: Dandie Dinmont Terrier
+ 195: Boston Terrier
+ 196: Miniature Schnauzer
+ 197: Giant Schnauzer
+ 198: Standard Schnauzer
+ 199: Scottish Terrier
+ 200: Tibetan Terrier
+ 201: Australian Silky Terrier
+ 202: Soft-coated Wheaten Terrier
+ 203: West Highland White Terrier
+ 204: Lhasa Apso
+ 205: Flat-Coated Retriever
+ 206: Curly-coated Retriever
+ 207: Golden Retriever
+ 208: Labrador Retriever
+ 209: Chesapeake Bay Retriever
+ 210: German Shorthaired Pointer
+ 211: Vizsla
+ 212: English Setter
+ 213: Irish Setter
+ 214: Gordon Setter
+ 215: Brittany
+ 216: Clumber Spaniel
+ 217: English Springer Spaniel
+ 218: Welsh Springer Spaniel
+ 219: Cocker Spaniels
+ 220: Sussex Spaniel
+ 221: Irish Water Spaniel
+ 222: Kuvasz
+ 223: Schipperke
+ 224: Groenendael
+ 225: Malinois
+ 226: Briard
+ 227: Australian Kelpie
+ 228: Komondor
+ 229: Old English Sheepdog
+ 230: Shetland Sheepdog
+ 231: collie
+ 232: Border Collie
+ 233: Bouvier des Flandres
+ 234: Rottweiler
+ 235: German Shepherd Dog
+ 236: Dobermann
+ 237: Miniature Pinscher
+ 238: Greater Swiss Mountain Dog
+ 239: Bernese Mountain Dog
+ 240: Appenzeller Sennenhund
+ 241: Entlebucher Sennenhund
+ 242: Boxer
+ 243: Bullmastiff
+ 244: Tibetan Mastiff
+ 245: French Bulldog
+ 246: Great Dane
+ 247: St. Bernard
+ 248: husky
+ 249: Alaskan Malamute
+ 250: Siberian Husky
+ 251: Dalmatian
+ 252: Affenpinscher
+ 253: Basenji
+ 254: pug
+ 255: Leonberger
+ 256: Newfoundland
+ 257: Pyrenean Mountain Dog
+ 258: Samoyed
+ 259: Pomeranian
+ 260: Chow Chow
+ 261: Keeshond
+ 262: Griffon Bruxellois
+ 263: Pembroke Welsh Corgi
+ 264: Cardigan Welsh Corgi
+ 265: Toy Poodle
+ 266: Miniature Poodle
+ 267: Standard Poodle
+ 268: Mexican hairless dog
+ 269: grey wolf
+ 270: Alaskan tundra wolf
+ 271: red wolf
+ 272: coyote
+ 273: dingo
+ 274: dhole
+ 275: African wild dog
+ 276: hyena
+ 277: red fox
+ 278: kit fox
+ 279: Arctic fox
+ 280: grey fox
+ 281: tabby cat
+ 282: tiger cat
+ 283: Persian cat
+ 284: Siamese cat
+ 285: Egyptian Mau
+ 286: cougar
+ 287: lynx
+ 288: leopard
+ 289: snow leopard
+ 290: jaguar
+ 291: lion
+ 292: tiger
+ 293: cheetah
+ 294: brown bear
+ 295: American black bear
+ 296: polar bear
+ 297: sloth bear
+ 298: mongoose
+ 299: meerkat
+ 300: tiger beetle
+ 301: ladybug
+ 302: ground beetle
+ 303: longhorn beetle
+ 304: leaf beetle
+ 305: dung beetle
+ 306: rhinoceros beetle
+ 307: weevil
+ 308: fly
+ 309: bee
+ 310: ant
+ 311: grasshopper
+ 312: cricket
+ 313: stick insect
+ 314: cockroach
+ 315: mantis
+ 316: cicada
+ 317: leafhopper
+ 318: lacewing
+ 319: dragonfly
+ 320: damselfly
+ 321: red admiral
+ 322: ringlet
+ 323: monarch butterfly
+ 324: small white
+ 325: sulphur butterfly
+ 326: gossamer-winged butterfly
+ 327: starfish
+ 328: sea urchin
+ 329: sea cucumber
+ 330: cottontail rabbit
+ 331: hare
+ 332: Angora rabbit
+ 333: hamster
+ 334: porcupine
+ 335: fox squirrel
+ 336: marmot
+ 337: beaver
+ 338: guinea pig
+ 339: common sorrel
+ 340: zebra
+ 341: pig
+ 342: wild boar
+ 343: warthog
+ 344: hippopotamus
+ 345: ox
+ 346: water buffalo
+ 347: bison
+ 348: ram
+ 349: bighorn sheep
+ 350: Alpine ibex
+ 351: hartebeest
+ 352: impala
+ 353: gazelle
+ 354: dromedary
+ 355: llama
+ 356: weasel
+ 357: mink
+ 358: European polecat
+ 359: black-footed ferret
+ 360: otter
+ 361: skunk
+ 362: badger
+ 363: armadillo
+ 364: three-toed sloth
+ 365: orangutan
+ 366: gorilla
+ 367: chimpanzee
+ 368: gibbon
+ 369: siamang
+ 370: guenon
+ 371: patas monkey
+ 372: baboon
+ 373: macaque
+ 374: langur
+ 375: black-and-white colobus
+ 376: proboscis monkey
+ 377: marmoset
+ 378: white-headed capuchin
+ 379: howler monkey
+ 380: titi
+ 381: Geoffroy's spider monkey
+ 382: common squirrel monkey
+ 383: ring-tailed lemur
+ 384: indri
+ 385: Asian elephant
+ 386: African bush elephant
+ 387: red panda
+ 388: giant panda
+ 389: snoek
+ 390: eel
+ 391: coho salmon
+ 392: rock beauty
+ 393: clownfish
+ 394: sturgeon
+ 395: garfish
+ 396: lionfish
+ 397: pufferfish
+ 398: abacus
+ 399: abaya
+ 400: academic gown
+ 401: accordion
+ 402: acoustic guitar
+ 403: aircraft carrier
+ 404: airliner
+ 405: airship
+ 406: altar
+ 407: ambulance
+ 408: amphibious vehicle
+ 409: analog clock
+ 410: apiary
+ 411: apron
+ 412: waste container
+ 413: assault rifle
+ 414: backpack
+ 415: bakery
+ 416: balance beam
+ 417: balloon
+ 418: ballpoint pen
+ 419: Band-Aid
+ 420: banjo
+ 421: baluster
+ 422: barbell
+ 423: barber chair
+ 424: barbershop
+ 425: barn
+ 426: barometer
+ 427: barrel
+ 428: wheelbarrow
+ 429: baseball
+ 430: basketball
+ 431: bassinet
+ 432: bassoon
+ 433: swimming cap
+ 434: bath towel
+ 435: bathtub
+ 436: station wagon
+ 437: lighthouse
+ 438: beaker
+ 439: military cap
+ 440: beer bottle
+ 441: beer glass
+ 442: bell-cot
+ 443: bib
+ 444: tandem bicycle
+ 445: bikini
+ 446: ring binder
+ 447: binoculars
+ 448: birdhouse
+ 449: boathouse
+ 450: bobsleigh
+ 451: bolo tie
+ 452: poke bonnet
+ 453: bookcase
+ 454: bookstore
+ 455: bottle cap
+ 456: bow
+ 457: bow tie
+ 458: brass
+ 459: bra
+ 460: breakwater
+ 461: breastplate
+ 462: broom
+ 463: bucket
+ 464: buckle
+ 465: bulletproof vest
+ 466: high-speed train
+ 467: butcher shop
+ 468: taxicab
+ 469: cauldron
+ 470: candle
+ 471: cannon
+ 472: canoe
+ 473: can opener
+ 474: cardigan
+ 475: car mirror
+ 476: carousel
+ 477: tool kit
+ 478: carton
+ 479: car wheel
+ 480: automated teller machine
+ 481: cassette
+ 482: cassette player
+ 483: castle
+ 484: catamaran
+ 485: CD player
+ 486: cello
+ 487: mobile phone
+ 488: chain
+ 489: chain-link fence
+ 490: chain mail
+ 491: chainsaw
+ 492: chest
+ 493: chiffonier
+ 494: chime
+ 495: china cabinet
+ 496: Christmas stocking
+ 497: church
+ 498: movie theater
+ 499: cleaver
+ 500: cliff dwelling
+ 501: cloak
+ 502: clogs
+ 503: cocktail shaker
+ 504: coffee mug
+ 505: coffeemaker
+ 506: coil
+ 507: combination lock
+ 508: computer keyboard
+ 509: confectionery store
+ 510: container ship
+ 511: convertible
+ 512: corkscrew
+ 513: cornet
+ 514: cowboy boot
+ 515: cowboy hat
+ 516: cradle
+ 517: crane (machine)
+ 518: crash helmet
+ 519: crate
+ 520: infant bed
+ 521: Crock Pot
+ 522: croquet ball
+ 523: crutch
+ 524: cuirass
+ 525: dam
+ 526: desk
+ 527: desktop computer
+ 528: rotary dial telephone
+ 529: diaper
+ 530: digital clock
+ 531: digital watch
+ 532: dining table
+ 533: dishcloth
+ 534: dishwasher
+ 535: disc brake
+ 536: dock
+ 537: dog sled
+ 538: dome
+ 539: doormat
+ 540: drilling rig
+ 541: drum
+ 542: drumstick
+ 543: dumbbell
+ 544: Dutch oven
+ 545: electric fan
+ 546: electric guitar
+ 547: electric locomotive
+ 548: entertainment center
+ 549: envelope
+ 550: espresso machine
+ 551: face powder
+ 552: feather boa
+ 553: filing cabinet
+ 554: fireboat
+ 555: fire engine
+ 556: fire screen sheet
+ 557: flagpole
+ 558: flute
+ 559: folding chair
+ 560: football helmet
+ 561: forklift
+ 562: fountain
+ 563: fountain pen
+ 564: four-poster bed
+ 565: freight car
+ 566: French horn
+ 567: frying pan
+ 568: fur coat
+ 569: garbage truck
+ 570: gas mask
+ 571: gas pump
+ 572: goblet
+ 573: go-kart
+ 574: golf ball
+ 575: golf cart
+ 576: gondola
+ 577: gong
+ 578: gown
+ 579: grand piano
+ 580: greenhouse
+ 581: grille
+ 582: grocery store
+ 583: guillotine
+ 584: barrette
+ 585: hair spray
+ 586: half-track
+ 587: hammer
+ 588: hamper
+ 589: hair dryer
+ 590: hand-held computer
+ 591: handkerchief
+ 592: hard disk drive
+ 593: harmonica
+ 594: harp
+ 595: harvester
+ 596: hatchet
+ 597: holster
+ 598: home theater
+ 599: honeycomb
+ 600: hook
+ 601: hoop skirt
+ 602: horizontal bar
+ 603: horse-drawn vehicle
+ 604: hourglass
+ 605: iPod
+ 606: clothes iron
+ 607: jack-o'-lantern
+ 608: jeans
+ 609: jeep
+ 610: T-shirt
+ 611: jigsaw puzzle
+ 612: pulled rickshaw
+ 613: joystick
+ 614: kimono
+ 615: knee pad
+ 616: knot
+ 617: lab coat
+ 618: ladle
+ 619: lampshade
+ 620: laptop computer
+ 621: lawn mower
+ 622: lens cap
+ 623: paper knife
+ 624: library
+ 625: lifeboat
+ 626: lighter
+ 627: limousine
+ 628: ocean liner
+ 629: lipstick
+ 630: slip-on shoe
+ 631: lotion
+ 632: speaker
+ 633: loupe
+ 634: sawmill
+ 635: magnetic compass
+ 636: mail bag
+ 637: mailbox
+ 638: tights
+ 639: tank suit
+ 640: manhole cover
+ 641: maraca
+ 642: marimba
+ 643: mask
+ 644: match
+ 645: maypole
+ 646: maze
+ 647: measuring cup
+ 648: medicine chest
+ 649: megalith
+ 650: microphone
+ 651: microwave oven
+ 652: military uniform
+ 653: milk can
+ 654: minibus
+ 655: miniskirt
+ 656: minivan
+ 657: missile
+ 658: mitten
+ 659: mixing bowl
+ 660: mobile home
+ 661: Model T
+ 662: modem
+ 663: monastery
+ 664: monitor
+ 665: moped
+ 666: mortar
+ 667: square academic cap
+ 668: mosque
+ 669: mosquito net
+ 670: scooter
+ 671: mountain bike
+ 672: tent
+ 673: computer mouse
+ 674: mousetrap
+ 675: moving van
+ 676: muzzle
+ 677: nail
+ 678: neck brace
+ 679: necklace
+ 680: nipple
+ 681: notebook computer
+ 682: obelisk
+ 683: oboe
+ 684: ocarina
+ 685: odometer
+ 686: oil filter
+ 687: organ
+ 688: oscilloscope
+ 689: overskirt
+ 690: bullock cart
+ 691: oxygen mask
+ 692: packet
+ 693: paddle
+ 694: paddle wheel
+ 695: padlock
+ 696: paintbrush
+ 697: pajamas
+ 698: palace
+ 699: pan flute
+ 700: paper towel
+ 701: parachute
+ 702: parallel bars
+ 703: park bench
+ 704: parking meter
+ 705: passenger car
+ 706: patio
+ 707: payphone
+ 708: pedestal
+ 709: pencil case
+ 710: pencil sharpener
+ 711: perfume
+ 712: Petri dish
+ 713: photocopier
+ 714: plectrum
+ 715: Pickelhaube
+ 716: picket fence
+ 717: pickup truck
+ 718: pier
+ 719: piggy bank
+ 720: pill bottle
+ 721: pillow
+ 722: ping-pong ball
+ 723: pinwheel
+ 724: pirate ship
+ 725: pitcher
+ 726: hand plane
+ 727: planetarium
+ 728: plastic bag
+ 729: plate rack
+ 730: plow
+ 731: plunger
+ 732: Polaroid camera
+ 733: pole
+ 734: police van
+ 735: poncho
+ 736: billiard table
+ 737: soda bottle
+ 738: pot
+ 739: potter's wheel
+ 740: power drill
+ 741: prayer rug
+ 742: printer
+ 743: prison
+ 744: projectile
+ 745: projector
+ 746: hockey puck
+ 747: punching bag
+ 748: purse
+ 749: quill
+ 750: quilt
+ 751: race car
+ 752: racket
+ 753: radiator
+ 754: radio
+ 755: radio telescope
+ 756: rain barrel
+ 757: recreational vehicle
+ 758: reel
+ 759: reflex camera
+ 760: refrigerator
+ 761: remote control
+ 762: restaurant
+ 763: revolver
+ 764: rifle
+ 765: rocking chair
+ 766: rotisserie
+ 767: eraser
+ 768: rugby ball
+ 769: ruler
+ 770: running shoe
+ 771: safe
+ 772: safety pin
+ 773: salt shaker
+ 774: sandal
+ 775: sarong
+ 776: saxophone
+ 777: scabbard
+ 778: weighing scale
+ 779: school bus
+ 780: schooner
+ 781: scoreboard
+ 782: CRT screen
+ 783: screw
+ 784: screwdriver
+ 785: seat belt
+ 786: sewing machine
+ 787: shield
+ 788: shoe store
+ 789: shoji
+ 790: shopping basket
+ 791: shopping cart
+ 792: shovel
+ 793: shower cap
+ 794: shower curtain
+ 795: ski
+ 796: ski mask
+ 797: sleeping bag
+ 798: slide rule
+ 799: sliding door
+ 800: slot machine
+ 801: snorkel
+ 802: snowmobile
+ 803: snowplow
+ 804: soap dispenser
+ 805: soccer ball
+ 806: sock
+ 807: solar thermal collector
+ 808: sombrero
+ 809: soup bowl
+ 810: space bar
+ 811: space heater
+ 812: space shuttle
+ 813: spatula
+ 814: motorboat
+ 815: spider web
+ 816: spindle
+ 817: sports car
+ 818: spotlight
+ 819: stage
+ 820: steam locomotive
+ 821: through arch bridge
+ 822: steel drum
+ 823: stethoscope
+ 824: scarf
+ 825: stone wall
+ 826: stopwatch
+ 827: stove
+ 828: strainer
+ 829: tram
+ 830: stretcher
+ 831: couch
+ 832: stupa
+ 833: submarine
+ 834: suit
+ 835: sundial
+ 836: sunglass
+ 837: sunglasses
+ 838: sunscreen
+ 839: suspension bridge
+ 840: mop
+ 841: sweatshirt
+ 842: swimsuit
+ 843: swing
+ 844: switch
+ 845: syringe
+ 846: table lamp
+ 847: tank
+ 848: tape player
+ 849: teapot
+ 850: teddy bear
+ 851: television
+ 852: tennis ball
+ 853: thatched roof
+ 854: front curtain
+ 855: thimble
+ 856: threshing machine
+ 857: throne
+ 858: tile roof
+ 859: toaster
+ 860: tobacco shop
+ 861: toilet seat
+ 862: torch
+ 863: totem pole
+ 864: tow truck
+ 865: toy store
+ 866: tractor
+ 867: semi-trailer truck
+ 868: tray
+ 869: trench coat
+ 870: tricycle
+ 871: trimaran
+ 872: tripod
+ 873: triumphal arch
+ 874: trolleybus
+ 875: trombone
+ 876: tub
+ 877: turnstile
+ 878: typewriter keyboard
+ 879: umbrella
+ 880: unicycle
+ 881: upright piano
+ 882: vacuum cleaner
+ 883: vase
+ 884: vault
+ 885: velvet
+ 886: vending machine
+ 887: vestment
+ 888: viaduct
+ 889: violin
+ 890: volleyball
+ 891: waffle iron
+ 892: wall clock
+ 893: wallet
+ 894: wardrobe
+ 895: military aircraft
+ 896: sink
+ 897: washing machine
+ 898: water bottle
+ 899: water jug
+ 900: water tower
+ 901: whiskey jug
+ 902: whistle
+ 903: wig
+ 904: window screen
+ 905: window shade
+ 906: Windsor tie
+ 907: wine bottle
+ 908: wing
+ 909: wok
+ 910: wooden spoon
+ 911: wool
+ 912: split-rail fence
+ 913: shipwreck
+ 914: yawl
+ 915: yurt
+ 916: website
+ 917: comic book
+ 918: crossword
+ 919: traffic sign
+ 920: traffic light
+ 921: dust jacket
+ 922: menu
+ 923: plate
+ 924: guacamole
+ 925: consomme
+ 926: hot pot
+ 927: trifle
+ 928: ice cream
+ 929: ice pop
+ 930: baguette
+ 931: bagel
+ 932: pretzel
+ 933: cheeseburger
+ 934: hot dog
+ 935: mashed potato
+ 936: cabbage
+ 937: broccoli
+ 938: cauliflower
+ 939: zucchini
+ 940: spaghetti squash
+ 941: acorn squash
+ 942: butternut squash
+ 943: cucumber
+ 944: artichoke
+ 945: bell pepper
+ 946: cardoon
+ 947: mushroom
+ 948: Granny Smith
+ 949: strawberry
+ 950: orange
+ 951: lemon
+ 952: fig
+ 953: pineapple
+ 954: banana
+ 955: jackfruit
+ 956: custard apple
+ 957: pomegranate
+ 958: hay
+ 959: carbonara
+ 960: chocolate syrup
+ 961: dough
+ 962: meatloaf
+ 963: pizza
+ 964: pot pie
+ 965: burrito
+ 966: red wine
+ 967: espresso
+ 968: cup
+ 969: eggnog
+ 970: alp
+ 971: bubble
+ 972: cliff
+ 973: coral reef
+ 974: geyser
+ 975: lakeshore
+ 976: promontory
+ 977: shoal
+ 978: seashore
+ 979: valley
+ 980: volcano
+ 981: baseball player
+ 982: bridegroom
+ 983: scuba diver
+ 984: rapeseed
+ 985: daisy
+ 986: yellow lady's slipper
+ 987: corn
+ 988: acorn
+ 989: rose hip
+ 990: horse chestnut seed
+ 991: coral fungus
+ 992: agaric
+ 993: gyromitra
+ 994: stinkhorn mushroom
+ 995: earth star
+ 996: hen-of-the-woods
+ 997: bolete
+ 998: ear
+ 999: toilet paper
+
+
+# Download script/URL (optional)
+download: data/scripts/get_imagenet.sh
diff --git a/data/Objects365.yaml b/data/Objects365.yaml
index 4cc94753f530..05b26a1f4796 100644
--- a/data/Objects365.yaml
+++ b/data/Objects365.yaml
@@ -14,48 +14,372 @@ val: images/val # val images (relative to 'path') 80000 images
test: # test images (optional)
# Classes
-nc: 365 # number of classes
-names: ['Person', 'Sneakers', 'Chair', 'Other Shoes', 'Hat', 'Car', 'Lamp', 'Glasses', 'Bottle', 'Desk', 'Cup',
- 'Street Lights', 'Cabinet/shelf', 'Handbag/Satchel', 'Bracelet', 'Plate', 'Picture/Frame', 'Helmet', 'Book',
- 'Gloves', 'Storage box', 'Boat', 'Leather Shoes', 'Flower', 'Bench', 'Potted Plant', 'Bowl/Basin', 'Flag',
- 'Pillow', 'Boots', 'Vase', 'Microphone', 'Necklace', 'Ring', 'SUV', 'Wine Glass', 'Belt', 'Monitor/TV',
- 'Backpack', 'Umbrella', 'Traffic Light', 'Speaker', 'Watch', 'Tie', 'Trash bin Can', 'Slippers', 'Bicycle',
- 'Stool', 'Barrel/bucket', 'Van', 'Couch', 'Sandals', 'Basket', 'Drum', 'Pen/Pencil', 'Bus', 'Wild Bird',
- 'High Heels', 'Motorcycle', 'Guitar', 'Carpet', 'Cell Phone', 'Bread', 'Camera', 'Canned', 'Truck',
- 'Traffic cone', 'Cymbal', 'Lifesaver', 'Towel', 'Stuffed Toy', 'Candle', 'Sailboat', 'Laptop', 'Awning',
- 'Bed', 'Faucet', 'Tent', 'Horse', 'Mirror', 'Power outlet', 'Sink', 'Apple', 'Air Conditioner', 'Knife',
- 'Hockey Stick', 'Paddle', 'Pickup Truck', 'Fork', 'Traffic Sign', 'Balloon', 'Tripod', 'Dog', 'Spoon', 'Clock',
- 'Pot', 'Cow', 'Cake', 'Dinning Table', 'Sheep', 'Hanger', 'Blackboard/Whiteboard', 'Napkin', 'Other Fish',
- 'Orange/Tangerine', 'Toiletry', 'Keyboard', 'Tomato', 'Lantern', 'Machinery Vehicle', 'Fan',
- 'Green Vegetables', 'Banana', 'Baseball Glove', 'Airplane', 'Mouse', 'Train', 'Pumpkin', 'Soccer', 'Skiboard',
- 'Luggage', 'Nightstand', 'Tea pot', 'Telephone', 'Trolley', 'Head Phone', 'Sports Car', 'Stop Sign',
- 'Dessert', 'Scooter', 'Stroller', 'Crane', 'Remote', 'Refrigerator', 'Oven', 'Lemon', 'Duck', 'Baseball Bat',
- 'Surveillance Camera', 'Cat', 'Jug', 'Broccoli', 'Piano', 'Pizza', 'Elephant', 'Skateboard', 'Surfboard',
- 'Gun', 'Skating and Skiing shoes', 'Gas stove', 'Donut', 'Bow Tie', 'Carrot', 'Toilet', 'Kite', 'Strawberry',
- 'Other Balls', 'Shovel', 'Pepper', 'Computer Box', 'Toilet Paper', 'Cleaning Products', 'Chopsticks',
- 'Microwave', 'Pigeon', 'Baseball', 'Cutting/chopping Board', 'Coffee Table', 'Side Table', 'Scissors',
- 'Marker', 'Pie', 'Ladder', 'Snowboard', 'Cookies', 'Radiator', 'Fire Hydrant', 'Basketball', 'Zebra', 'Grape',
- 'Giraffe', 'Potato', 'Sausage', 'Tricycle', 'Violin', 'Egg', 'Fire Extinguisher', 'Candy', 'Fire Truck',
- 'Billiards', 'Converter', 'Bathtub', 'Wheelchair', 'Golf Club', 'Briefcase', 'Cucumber', 'Cigar/Cigarette',
- 'Paint Brush', 'Pear', 'Heavy Truck', 'Hamburger', 'Extractor', 'Extension Cord', 'Tong', 'Tennis Racket',
- 'Folder', 'American Football', 'earphone', 'Mask', 'Kettle', 'Tennis', 'Ship', 'Swing', 'Coffee Machine',
- 'Slide', 'Carriage', 'Onion', 'Green beans', 'Projector', 'Frisbee', 'Washing Machine/Drying Machine',
- 'Chicken', 'Printer', 'Watermelon', 'Saxophone', 'Tissue', 'Toothbrush', 'Ice cream', 'Hot-air balloon',
- 'Cello', 'French Fries', 'Scale', 'Trophy', 'Cabbage', 'Hot dog', 'Blender', 'Peach', 'Rice', 'Wallet/Purse',
- 'Volleyball', 'Deer', 'Goose', 'Tape', 'Tablet', 'Cosmetics', 'Trumpet', 'Pineapple', 'Golf Ball',
- 'Ambulance', 'Parking meter', 'Mango', 'Key', 'Hurdle', 'Fishing Rod', 'Medal', 'Flute', 'Brush', 'Penguin',
- 'Megaphone', 'Corn', 'Lettuce', 'Garlic', 'Swan', 'Helicopter', 'Green Onion', 'Sandwich', 'Nuts',
- 'Speed Limit Sign', 'Induction Cooker', 'Broom', 'Trombone', 'Plum', 'Rickshaw', 'Goldfish', 'Kiwi fruit',
- 'Router/modem', 'Poker Card', 'Toaster', 'Shrimp', 'Sushi', 'Cheese', 'Notepaper', 'Cherry', 'Pliers', 'CD',
- 'Pasta', 'Hammer', 'Cue', 'Avocado', 'Hamimelon', 'Flask', 'Mushroom', 'Screwdriver', 'Soap', 'Recorder',
- 'Bear', 'Eggplant', 'Board Eraser', 'Coconut', 'Tape Measure/Ruler', 'Pig', 'Showerhead', 'Globe', 'Chips',
- 'Steak', 'Crosswalk Sign', 'Stapler', 'Camel', 'Formula 1', 'Pomegranate', 'Dishwasher', 'Crab',
- 'Hoverboard', 'Meat ball', 'Rice Cooker', 'Tuba', 'Calculator', 'Papaya', 'Antelope', 'Parrot', 'Seal',
- 'Butterfly', 'Dumbbell', 'Donkey', 'Lion', 'Urinal', 'Dolphin', 'Electric Drill', 'Hair Dryer', 'Egg tart',
- 'Jellyfish', 'Treadmill', 'Lighter', 'Grapefruit', 'Game board', 'Mop', 'Radish', 'Baozi', 'Target', 'French',
- 'Spring Rolls', 'Monkey', 'Rabbit', 'Pencil Case', 'Yak', 'Red Cabbage', 'Binoculars', 'Asparagus', 'Barbell',
- 'Scallop', 'Noddles', 'Comb', 'Dumpling', 'Oyster', 'Table Tennis paddle', 'Cosmetics Brush/Eyeliner Pencil',
- 'Chainsaw', 'Eraser', 'Lobster', 'Durian', 'Okra', 'Lipstick', 'Cosmetics Mirror', 'Curling', 'Table Tennis']
+names:
+ 0: Person
+ 1: Sneakers
+ 2: Chair
+ 3: Other Shoes
+ 4: Hat
+ 5: Car
+ 6: Lamp
+ 7: Glasses
+ 8: Bottle
+ 9: Desk
+ 10: Cup
+ 11: Street Lights
+ 12: Cabinet/shelf
+ 13: Handbag/Satchel
+ 14: Bracelet
+ 15: Plate
+ 16: Picture/Frame
+ 17: Helmet
+ 18: Book
+ 19: Gloves
+ 20: Storage box
+ 21: Boat
+ 22: Leather Shoes
+ 23: Flower
+ 24: Bench
+ 25: Potted Plant
+ 26: Bowl/Basin
+ 27: Flag
+ 28: Pillow
+ 29: Boots
+ 30: Vase
+ 31: Microphone
+ 32: Necklace
+ 33: Ring
+ 34: SUV
+ 35: Wine Glass
+ 36: Belt
+ 37: Monitor/TV
+ 38: Backpack
+ 39: Umbrella
+ 40: Traffic Light
+ 41: Speaker
+ 42: Watch
+ 43: Tie
+ 44: Trash bin Can
+ 45: Slippers
+ 46: Bicycle
+ 47: Stool
+ 48: Barrel/bucket
+ 49: Van
+ 50: Couch
+ 51: Sandals
+ 52: Basket
+ 53: Drum
+ 54: Pen/Pencil
+ 55: Bus
+ 56: Wild Bird
+ 57: High Heels
+ 58: Motorcycle
+ 59: Guitar
+ 60: Carpet
+ 61: Cell Phone
+ 62: Bread
+ 63: Camera
+ 64: Canned
+ 65: Truck
+ 66: Traffic cone
+ 67: Cymbal
+ 68: Lifesaver
+ 69: Towel
+ 70: Stuffed Toy
+ 71: Candle
+ 72: Sailboat
+ 73: Laptop
+ 74: Awning
+ 75: Bed
+ 76: Faucet
+ 77: Tent
+ 78: Horse
+ 79: Mirror
+ 80: Power outlet
+ 81: Sink
+ 82: Apple
+ 83: Air Conditioner
+ 84: Knife
+ 85: Hockey Stick
+ 86: Paddle
+ 87: Pickup Truck
+ 88: Fork
+ 89: Traffic Sign
+ 90: Balloon
+ 91: Tripod
+ 92: Dog
+ 93: Spoon
+ 94: Clock
+ 95: Pot
+ 96: Cow
+ 97: Cake
+ 98: Dinning Table
+ 99: Sheep
+ 100: Hanger
+ 101: Blackboard/Whiteboard
+ 102: Napkin
+ 103: Other Fish
+ 104: Orange/Tangerine
+ 105: Toiletry
+ 106: Keyboard
+ 107: Tomato
+ 108: Lantern
+ 109: Machinery Vehicle
+ 110: Fan
+ 111: Green Vegetables
+ 112: Banana
+ 113: Baseball Glove
+ 114: Airplane
+ 115: Mouse
+ 116: Train
+ 117: Pumpkin
+ 118: Soccer
+ 119: Skiboard
+ 120: Luggage
+ 121: Nightstand
+ 122: Tea pot
+ 123: Telephone
+ 124: Trolley
+ 125: Head Phone
+ 126: Sports Car
+ 127: Stop Sign
+ 128: Dessert
+ 129: Scooter
+ 130: Stroller
+ 131: Crane
+ 132: Remote
+ 133: Refrigerator
+ 134: Oven
+ 135: Lemon
+ 136: Duck
+ 137: Baseball Bat
+ 138: Surveillance Camera
+ 139: Cat
+ 140: Jug
+ 141: Broccoli
+ 142: Piano
+ 143: Pizza
+ 144: Elephant
+ 145: Skateboard
+ 146: Surfboard
+ 147: Gun
+ 148: Skating and Skiing shoes
+ 149: Gas stove
+ 150: Donut
+ 151: Bow Tie
+ 152: Carrot
+ 153: Toilet
+ 154: Kite
+ 155: Strawberry
+ 156: Other Balls
+ 157: Shovel
+ 158: Pepper
+ 159: Computer Box
+ 160: Toilet Paper
+ 161: Cleaning Products
+ 162: Chopsticks
+ 163: Microwave
+ 164: Pigeon
+ 165: Baseball
+ 166: Cutting/chopping Board
+ 167: Coffee Table
+ 168: Side Table
+ 169: Scissors
+ 170: Marker
+ 171: Pie
+ 172: Ladder
+ 173: Snowboard
+ 174: Cookies
+ 175: Radiator
+ 176: Fire Hydrant
+ 177: Basketball
+ 178: Zebra
+ 179: Grape
+ 180: Giraffe
+ 181: Potato
+ 182: Sausage
+ 183: Tricycle
+ 184: Violin
+ 185: Egg
+ 186: Fire Extinguisher
+ 187: Candy
+ 188: Fire Truck
+ 189: Billiards
+ 190: Converter
+ 191: Bathtub
+ 192: Wheelchair
+ 193: Golf Club
+ 194: Briefcase
+ 195: Cucumber
+ 196: Cigar/Cigarette
+ 197: Paint Brush
+ 198: Pear
+ 199: Heavy Truck
+ 200: Hamburger
+ 201: Extractor
+ 202: Extension Cord
+ 203: Tong
+ 204: Tennis Racket
+ 205: Folder
+ 206: American Football
+ 207: earphone
+ 208: Mask
+ 209: Kettle
+ 210: Tennis
+ 211: Ship
+ 212: Swing
+ 213: Coffee Machine
+ 214: Slide
+ 215: Carriage
+ 216: Onion
+ 217: Green beans
+ 218: Projector
+ 219: Frisbee
+ 220: Washing Machine/Drying Machine
+ 221: Chicken
+ 222: Printer
+ 223: Watermelon
+ 224: Saxophone
+ 225: Tissue
+ 226: Toothbrush
+ 227: Ice cream
+ 228: Hot-air balloon
+ 229: Cello
+ 230: French Fries
+ 231: Scale
+ 232: Trophy
+ 233: Cabbage
+ 234: Hot dog
+ 235: Blender
+ 236: Peach
+ 237: Rice
+ 238: Wallet/Purse
+ 239: Volleyball
+ 240: Deer
+ 241: Goose
+ 242: Tape
+ 243: Tablet
+ 244: Cosmetics
+ 245: Trumpet
+ 246: Pineapple
+ 247: Golf Ball
+ 248: Ambulance
+ 249: Parking meter
+ 250: Mango
+ 251: Key
+ 252: Hurdle
+ 253: Fishing Rod
+ 254: Medal
+ 255: Flute
+ 256: Brush
+ 257: Penguin
+ 258: Megaphone
+ 259: Corn
+ 260: Lettuce
+ 261: Garlic
+ 262: Swan
+ 263: Helicopter
+ 264: Green Onion
+ 265: Sandwich
+ 266: Nuts
+ 267: Speed Limit Sign
+ 268: Induction Cooker
+ 269: Broom
+ 270: Trombone
+ 271: Plum
+ 272: Rickshaw
+ 273: Goldfish
+ 274: Kiwi fruit
+ 275: Router/modem
+ 276: Poker Card
+ 277: Toaster
+ 278: Shrimp
+ 279: Sushi
+ 280: Cheese
+ 281: Notepaper
+ 282: Cherry
+ 283: Pliers
+ 284: CD
+ 285: Pasta
+ 286: Hammer
+ 287: Cue
+ 288: Avocado
+ 289: Hamimelon
+ 290: Flask
+ 291: Mushroom
+ 292: Screwdriver
+ 293: Soap
+ 294: Recorder
+ 295: Bear
+ 296: Eggplant
+ 297: Board Eraser
+ 298: Coconut
+ 299: Tape Measure/Ruler
+ 300: Pig
+ 301: Showerhead
+ 302: Globe
+ 303: Chips
+ 304: Steak
+ 305: Crosswalk Sign
+ 306: Stapler
+ 307: Camel
+ 308: Formula 1
+ 309: Pomegranate
+ 310: Dishwasher
+ 311: Crab
+ 312: Hoverboard
+ 313: Meat ball
+ 314: Rice Cooker
+ 315: Tuba
+ 316: Calculator
+ 317: Papaya
+ 318: Antelope
+ 319: Parrot
+ 320: Seal
+ 321: Butterfly
+ 322: Dumbbell
+ 323: Donkey
+ 324: Lion
+ 325: Urinal
+ 326: Dolphin
+ 327: Electric Drill
+ 328: Hair Dryer
+ 329: Egg tart
+ 330: Jellyfish
+ 331: Treadmill
+ 332: Lighter
+ 333: Grapefruit
+ 334: Game board
+ 335: Mop
+ 336: Radish
+ 337: Baozi
+ 338: Target
+ 339: French
+ 340: Spring Rolls
+ 341: Monkey
+ 342: Rabbit
+ 343: Pencil Case
+ 344: Yak
+ 345: Red Cabbage
+ 346: Binoculars
+ 347: Asparagus
+ 348: Barbell
+ 349: Scallop
+ 350: Noddles
+ 351: Comb
+ 352: Dumpling
+ 353: Oyster
+ 354: Table Tennis paddle
+ 355: Cosmetics Brush/Eyeliner Pencil
+ 356: Chainsaw
+ 357: Eraser
+ 358: Lobster
+ 359: Durian
+ 360: Okra
+ 361: Lipstick
+ 362: Cosmetics Mirror
+ 363: Curling
+ 364: Table Tennis
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/SKU-110K.yaml b/data/SKU-110K.yaml
index 2acf34d155bd..edae7171c660 100644
--- a/data/SKU-110K.yaml
+++ b/data/SKU-110K.yaml
@@ -14,8 +14,8 @@ val: val.txt # val images (relative to 'path') 588 images
test: test.txt # test images (optional) 2936 images
# Classes
-nc: 1 # number of classes
-names: ['object'] # class names
+names:
+ 0: object
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/VOC.yaml b/data/VOC.yaml
index 636ddc42d46c..27d38109c53a 100644
--- a/data/VOC.yaml
+++ b/data/VOC.yaml
@@ -20,9 +20,27 @@ test: # test images (optional)
- images/test2007
# Classes
-nc: 20 # number of classes
-names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
- 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'] # class names
+names:
+ 0: aeroplane
+ 1: bicycle
+ 2: bird
+ 3: boat
+ 4: bottle
+ 5: bus
+ 6: car
+ 7: cat
+ 8: chair
+ 9: cow
+ 10: diningtable
+ 11: dog
+ 12: horse
+ 13: motorbike
+ 14: person
+ 15: pottedplant
+ 16: sheep
+ 17: sofa
+ 18: train
+ 19: tvmonitor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
@@ -47,12 +65,13 @@ download: |
w = int(size.find('width').text)
h = int(size.find('height').text)
+ names = list(yaml['names'].values()) # names list
for obj in root.iter('object'):
cls = obj.find('name').text
- if cls in yaml['names'] and not int(obj.find('difficult').text) == 1:
+ if cls in names and int(obj.find('difficult').text) != 1:
xmlbox = obj.find('bndbox')
bb = convert_box((w, h), [float(xmlbox.find(x).text) for x in ('xmin', 'xmax', 'ymin', 'ymax')])
- cls_id = yaml['names'].index(cls) # class id
+ cls_id = names.index(cls) # class id
out_file.write(" ".join([str(a) for a in (cls_id, *bb)]) + '\n')
diff --git a/data/VisDrone.yaml b/data/VisDrone.yaml
index 10337b46f104..a8bcf8e628ec 100644
--- a/data/VisDrone.yaml
+++ b/data/VisDrone.yaml
@@ -14,8 +14,17 @@ val: VisDrone2019-DET-val/images # val images (relative to 'path') 548 images
test: VisDrone2019-DET-test-dev/images # test images (optional) 1610 images
# Classes
-nc: 10 # number of classes
-names: ['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
+names:
+ 0: pedestrian
+ 1: people
+ 2: bicycle
+ 3: car
+ 4: van
+ 5: truck
+ 6: tricycle
+ 7: awning-tricycle
+ 8: bus
+ 9: motor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/coco.yaml b/data/coco.yaml
index 0c0c4adab05d..d64dfc7fed76 100644
--- a/data/coco.yaml
+++ b/data/coco.yaml
@@ -14,16 +14,87 @@ val: val2017.txt # val images (relative to 'path') 5000 images
test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
# Classes
-nc: 80 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
# Download script/URL (optional)
diff --git a/data/coco128-seg.yaml b/data/coco128-seg.yaml
new file mode 100644
index 000000000000..5e81910cc456
--- /dev/null
+++ b/data/coco128-seg.yaml
@@ -0,0 +1,101 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# COCO128-seg dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
+# Example usage: python train.py --data coco128.yaml
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco128-seg ← downloads here (7 MB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/coco128-seg # dataset root dir
+train: images/train2017 # train images (relative to 'path') 128 images
+val: images/train2017 # val images (relative to 'path') 128 images
+test: # test images (optional)
+
+# Classes
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
+
+
+# Download script/URL (optional)
+download: https://ultralytics.com/assets/coco128-seg.zip
diff --git a/data/coco128.yaml b/data/coco128.yaml
index 2517d2079257..12556736a571 100644
--- a/data/coco128.yaml
+++ b/data/coco128.yaml
@@ -14,16 +14,87 @@ val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
-nc: 80 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
# Download script/URL (optional)
diff --git a/data/hyps/hyp.no-augmentation.yaml b/data/hyps/hyp.no-augmentation.yaml
new file mode 100644
index 000000000000..8fbd5b262afa
--- /dev/null
+++ b/data/hyps/hyp.no-augmentation.yaml
@@ -0,0 +1,35 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters when using Albumentations frameworks
+# python train.py --hyp hyp.no-augmentation.yaml
+# See https://github.com/ultralytics/yolov5/pull/3882 for YOLOv5 + Albumentations Usage examples
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+# this parameters are all zero since we want to use albumentation framework
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0 # image HSV-Hue augmentation (fraction)
+hsv_s: 00 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0 # image translation (+/- fraction)
+scale: 0 # image scale (+/- gain)
+shear: 0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.0 # image flip left-right (probability)
+mosaic: 0.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/data/scripts/download_weights.sh b/data/scripts/download_weights.sh
index e9fa65394178..31e0a15569f2 100755
--- a/data/scripts/download_weights.sh
+++ b/data/scripts/download_weights.sh
@@ -1,7 +1,7 @@
#!/bin/bash
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Download latest models from https://github.com/ultralytics/yolov5/releases
-# Example usage: bash path/to/download_weights.sh
+# Example usage: bash data/scripts/download_weights.sh
# parent
# └── yolov5
# ├── yolov5s.pt ← downloads here
@@ -11,10 +11,12 @@
python - <\n",
+ "\n",
+ "\n",
+ "\n",
+ "
\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "6Qu7Iesl0p54"
+ },
+ "source": [
+ "# Status\n",
+ "\n",
+ "\n",
+ "\n",
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "IEijrePND_2I"
+ },
+ "source": [
+ "# Appendix\n",
+ "\n",
+ "Additional content below."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "GMusP4OAxFu6"
+ },
+ "outputs": [],
+ "source": [
+ "# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
+ "import torch\n",
+ "\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # yolov5n - yolov5x6 or custom\n",
+ "im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
+ "results = model(im) # inference\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
+ ]
+ }
+ ],
+ "metadata": {
+ "accelerator": "GPU",
+ "colab": {
+ "name": "YOLOv5 Classification Tutorial",
+ "provenance": []
+ },
+ "kernelspec": {
+ "display_name": "Python 3 (ipykernel)",
+ "language": "python",
+ "name": "python3"
+ },
+ "language_info": {
+ "codemirror_mode": {
+ "name": "ipython",
+ "version": 3
+ },
+ "file_extension": ".py",
+ "mimetype": "text/x-python",
+ "name": "python",
+ "nbconvert_exporter": "python",
+ "pygments_lexer": "ipython3",
+ "version": "3.7.12"
+ }
+ },
+ "nbformat": 4,
+ "nbformat_minor": 0
+}
\ No newline at end of file
diff --git a/classify/val.py b/classify/val.py
new file mode 100644
index 000000000000..8657036fb2a2
--- /dev/null
+++ b/classify/val.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 classification model on a classification dataset
+
+Usage:
+ $ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
+ $ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
+
+Usage - formats:
+ $ python classify/val.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls_openvino_model # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s-cls_paddle_model # PaddlePaddle
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (LOGGER, TQDM_BAR_FORMAT, Profile, check_img_size, check_requirements, colorstr,
+ increment_path, print_args)
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / '../datasets/mnist', # dataset dir
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ batch_size=128, # batch size
+ imgsz=224, # inference size (pixels)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ verbose=False, # verbose output
+ project=ROOT / 'runs/val-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ criterion=None,
+ pbar=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Dataloader
+ data = Path(data)
+ test_dir = data / 'test' if (data / 'test').exists() else data / 'val' # data/test or data/val
+ dataloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=batch_size,
+ augment=False,
+ rank=-1,
+ workers=workers)
+
+ model.eval()
+ pred, targets, loss, dt = [], [], 0, (Profile(), Profile(), Profile())
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
+ bar = tqdm(dataloader, desc, n, not training, bar_format=TQDM_BAR_FORMAT, position=0)
+ with torch.cuda.amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ with dt[0]:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ with dt[1]:
+ y = model(images)
+
+ with dt[2]:
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in model.names.items():
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>24}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ # Print results
+ t = tuple(x.t / len(dataloader.dataset.samples) * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+
+ return top1, top5, loss
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=128, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
+ parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/data/Argoverse.yaml b/data/Argoverse.yaml
index 9d21296e3291..558151dc849e 100644
--- a/data/Argoverse.yaml
+++ b/data/Argoverse.yaml
@@ -14,8 +14,15 @@ val: Argoverse-1.1/images/val/ # val images (relative to 'path') 15062 images
test: Argoverse-1.1/images/test/ # test images (optional) https://eval.ai/web/challenges/challenge-page/800/overview
# Classes
-nc: 8 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'bus', 'truck', 'traffic_light', 'stop_sign'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: bus
+ 5: truck
+ 6: traffic_light
+ 7: stop_sign
# Download script/URL (optional) ---------------------------------------------------------------------------------------
@@ -56,7 +63,7 @@ download: |
# Download
- dir = Path('../datasets/Argoverse') # dataset root dir
+ dir = Path(yaml['path']) # dataset root dir
urls = ['https://argoverse-hd.s3.us-east-2.amazonaws.com/Argoverse-HD-Full.zip']
download(urls, dir=dir, delete=False)
diff --git a/data/GlobalWheat2020.yaml b/data/GlobalWheat2020.yaml
index 4c43693f1d82..01812d031bc5 100644
--- a/data/GlobalWheat2020.yaml
+++ b/data/GlobalWheat2020.yaml
@@ -26,8 +26,8 @@ test: # test images (optional) 1276 images
- images/uq_1
# Classes
-nc: 1 # number of classes
-names: ['wheat_head'] # class names
+names:
+ 0: wheat_head
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/ImageNet.yaml b/data/ImageNet.yaml
new file mode 100644
index 000000000000..14f12950605f
--- /dev/null
+++ b/data/ImageNet.yaml
@@ -0,0 +1,1022 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
+# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
+# Example usage: python classify/train.py --data imagenet
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here (144 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/imagenet # dataset root dir
+train: train # train images (relative to 'path') 1281167 images
+val: val # val images (relative to 'path') 50000 images
+test: # test images (optional)
+
+# Classes
+names:
+ 0: tench
+ 1: goldfish
+ 2: great white shark
+ 3: tiger shark
+ 4: hammerhead shark
+ 5: electric ray
+ 6: stingray
+ 7: cock
+ 8: hen
+ 9: ostrich
+ 10: brambling
+ 11: goldfinch
+ 12: house finch
+ 13: junco
+ 14: indigo bunting
+ 15: American robin
+ 16: bulbul
+ 17: jay
+ 18: magpie
+ 19: chickadee
+ 20: American dipper
+ 21: kite
+ 22: bald eagle
+ 23: vulture
+ 24: great grey owl
+ 25: fire salamander
+ 26: smooth newt
+ 27: newt
+ 28: spotted salamander
+ 29: axolotl
+ 30: American bullfrog
+ 31: tree frog
+ 32: tailed frog
+ 33: loggerhead sea turtle
+ 34: leatherback sea turtle
+ 35: mud turtle
+ 36: terrapin
+ 37: box turtle
+ 38: banded gecko
+ 39: green iguana
+ 40: Carolina anole
+ 41: desert grassland whiptail lizard
+ 42: agama
+ 43: frilled-necked lizard
+ 44: alligator lizard
+ 45: Gila monster
+ 46: European green lizard
+ 47: chameleon
+ 48: Komodo dragon
+ 49: Nile crocodile
+ 50: American alligator
+ 51: triceratops
+ 52: worm snake
+ 53: ring-necked snake
+ 54: eastern hog-nosed snake
+ 55: smooth green snake
+ 56: kingsnake
+ 57: garter snake
+ 58: water snake
+ 59: vine snake
+ 60: night snake
+ 61: boa constrictor
+ 62: African rock python
+ 63: Indian cobra
+ 64: green mamba
+ 65: sea snake
+ 66: Saharan horned viper
+ 67: eastern diamondback rattlesnake
+ 68: sidewinder
+ 69: trilobite
+ 70: harvestman
+ 71: scorpion
+ 72: yellow garden spider
+ 73: barn spider
+ 74: European garden spider
+ 75: southern black widow
+ 76: tarantula
+ 77: wolf spider
+ 78: tick
+ 79: centipede
+ 80: black grouse
+ 81: ptarmigan
+ 82: ruffed grouse
+ 83: prairie grouse
+ 84: peacock
+ 85: quail
+ 86: partridge
+ 87: grey parrot
+ 88: macaw
+ 89: sulphur-crested cockatoo
+ 90: lorikeet
+ 91: coucal
+ 92: bee eater
+ 93: hornbill
+ 94: hummingbird
+ 95: jacamar
+ 96: toucan
+ 97: duck
+ 98: red-breasted merganser
+ 99: goose
+ 100: black swan
+ 101: tusker
+ 102: echidna
+ 103: platypus
+ 104: wallaby
+ 105: koala
+ 106: wombat
+ 107: jellyfish
+ 108: sea anemone
+ 109: brain coral
+ 110: flatworm
+ 111: nematode
+ 112: conch
+ 113: snail
+ 114: slug
+ 115: sea slug
+ 116: chiton
+ 117: chambered nautilus
+ 118: Dungeness crab
+ 119: rock crab
+ 120: fiddler crab
+ 121: red king crab
+ 122: American lobster
+ 123: spiny lobster
+ 124: crayfish
+ 125: hermit crab
+ 126: isopod
+ 127: white stork
+ 128: black stork
+ 129: spoonbill
+ 130: flamingo
+ 131: little blue heron
+ 132: great egret
+ 133: bittern
+ 134: crane (bird)
+ 135: limpkin
+ 136: common gallinule
+ 137: American coot
+ 138: bustard
+ 139: ruddy turnstone
+ 140: dunlin
+ 141: common redshank
+ 142: dowitcher
+ 143: oystercatcher
+ 144: pelican
+ 145: king penguin
+ 146: albatross
+ 147: grey whale
+ 148: killer whale
+ 149: dugong
+ 150: sea lion
+ 151: Chihuahua
+ 152: Japanese Chin
+ 153: Maltese
+ 154: Pekingese
+ 155: Shih Tzu
+ 156: King Charles Spaniel
+ 157: Papillon
+ 158: toy terrier
+ 159: Rhodesian Ridgeback
+ 160: Afghan Hound
+ 161: Basset Hound
+ 162: Beagle
+ 163: Bloodhound
+ 164: Bluetick Coonhound
+ 165: Black and Tan Coonhound
+ 166: Treeing Walker Coonhound
+ 167: English foxhound
+ 168: Redbone Coonhound
+ 169: borzoi
+ 170: Irish Wolfhound
+ 171: Italian Greyhound
+ 172: Whippet
+ 173: Ibizan Hound
+ 174: Norwegian Elkhound
+ 175: Otterhound
+ 176: Saluki
+ 177: Scottish Deerhound
+ 178: Weimaraner
+ 179: Staffordshire Bull Terrier
+ 180: American Staffordshire Terrier
+ 181: Bedlington Terrier
+ 182: Border Terrier
+ 183: Kerry Blue Terrier
+ 184: Irish Terrier
+ 185: Norfolk Terrier
+ 186: Norwich Terrier
+ 187: Yorkshire Terrier
+ 188: Wire Fox Terrier
+ 189: Lakeland Terrier
+ 190: Sealyham Terrier
+ 191: Airedale Terrier
+ 192: Cairn Terrier
+ 193: Australian Terrier
+ 194: Dandie Dinmont Terrier
+ 195: Boston Terrier
+ 196: Miniature Schnauzer
+ 197: Giant Schnauzer
+ 198: Standard Schnauzer
+ 199: Scottish Terrier
+ 200: Tibetan Terrier
+ 201: Australian Silky Terrier
+ 202: Soft-coated Wheaten Terrier
+ 203: West Highland White Terrier
+ 204: Lhasa Apso
+ 205: Flat-Coated Retriever
+ 206: Curly-coated Retriever
+ 207: Golden Retriever
+ 208: Labrador Retriever
+ 209: Chesapeake Bay Retriever
+ 210: German Shorthaired Pointer
+ 211: Vizsla
+ 212: English Setter
+ 213: Irish Setter
+ 214: Gordon Setter
+ 215: Brittany
+ 216: Clumber Spaniel
+ 217: English Springer Spaniel
+ 218: Welsh Springer Spaniel
+ 219: Cocker Spaniels
+ 220: Sussex Spaniel
+ 221: Irish Water Spaniel
+ 222: Kuvasz
+ 223: Schipperke
+ 224: Groenendael
+ 225: Malinois
+ 226: Briard
+ 227: Australian Kelpie
+ 228: Komondor
+ 229: Old English Sheepdog
+ 230: Shetland Sheepdog
+ 231: collie
+ 232: Border Collie
+ 233: Bouvier des Flandres
+ 234: Rottweiler
+ 235: German Shepherd Dog
+ 236: Dobermann
+ 237: Miniature Pinscher
+ 238: Greater Swiss Mountain Dog
+ 239: Bernese Mountain Dog
+ 240: Appenzeller Sennenhund
+ 241: Entlebucher Sennenhund
+ 242: Boxer
+ 243: Bullmastiff
+ 244: Tibetan Mastiff
+ 245: French Bulldog
+ 246: Great Dane
+ 247: St. Bernard
+ 248: husky
+ 249: Alaskan Malamute
+ 250: Siberian Husky
+ 251: Dalmatian
+ 252: Affenpinscher
+ 253: Basenji
+ 254: pug
+ 255: Leonberger
+ 256: Newfoundland
+ 257: Pyrenean Mountain Dog
+ 258: Samoyed
+ 259: Pomeranian
+ 260: Chow Chow
+ 261: Keeshond
+ 262: Griffon Bruxellois
+ 263: Pembroke Welsh Corgi
+ 264: Cardigan Welsh Corgi
+ 265: Toy Poodle
+ 266: Miniature Poodle
+ 267: Standard Poodle
+ 268: Mexican hairless dog
+ 269: grey wolf
+ 270: Alaskan tundra wolf
+ 271: red wolf
+ 272: coyote
+ 273: dingo
+ 274: dhole
+ 275: African wild dog
+ 276: hyena
+ 277: red fox
+ 278: kit fox
+ 279: Arctic fox
+ 280: grey fox
+ 281: tabby cat
+ 282: tiger cat
+ 283: Persian cat
+ 284: Siamese cat
+ 285: Egyptian Mau
+ 286: cougar
+ 287: lynx
+ 288: leopard
+ 289: snow leopard
+ 290: jaguar
+ 291: lion
+ 292: tiger
+ 293: cheetah
+ 294: brown bear
+ 295: American black bear
+ 296: polar bear
+ 297: sloth bear
+ 298: mongoose
+ 299: meerkat
+ 300: tiger beetle
+ 301: ladybug
+ 302: ground beetle
+ 303: longhorn beetle
+ 304: leaf beetle
+ 305: dung beetle
+ 306: rhinoceros beetle
+ 307: weevil
+ 308: fly
+ 309: bee
+ 310: ant
+ 311: grasshopper
+ 312: cricket
+ 313: stick insect
+ 314: cockroach
+ 315: mantis
+ 316: cicada
+ 317: leafhopper
+ 318: lacewing
+ 319: dragonfly
+ 320: damselfly
+ 321: red admiral
+ 322: ringlet
+ 323: monarch butterfly
+ 324: small white
+ 325: sulphur butterfly
+ 326: gossamer-winged butterfly
+ 327: starfish
+ 328: sea urchin
+ 329: sea cucumber
+ 330: cottontail rabbit
+ 331: hare
+ 332: Angora rabbit
+ 333: hamster
+ 334: porcupine
+ 335: fox squirrel
+ 336: marmot
+ 337: beaver
+ 338: guinea pig
+ 339: common sorrel
+ 340: zebra
+ 341: pig
+ 342: wild boar
+ 343: warthog
+ 344: hippopotamus
+ 345: ox
+ 346: water buffalo
+ 347: bison
+ 348: ram
+ 349: bighorn sheep
+ 350: Alpine ibex
+ 351: hartebeest
+ 352: impala
+ 353: gazelle
+ 354: dromedary
+ 355: llama
+ 356: weasel
+ 357: mink
+ 358: European polecat
+ 359: black-footed ferret
+ 360: otter
+ 361: skunk
+ 362: badger
+ 363: armadillo
+ 364: three-toed sloth
+ 365: orangutan
+ 366: gorilla
+ 367: chimpanzee
+ 368: gibbon
+ 369: siamang
+ 370: guenon
+ 371: patas monkey
+ 372: baboon
+ 373: macaque
+ 374: langur
+ 375: black-and-white colobus
+ 376: proboscis monkey
+ 377: marmoset
+ 378: white-headed capuchin
+ 379: howler monkey
+ 380: titi
+ 381: Geoffroy's spider monkey
+ 382: common squirrel monkey
+ 383: ring-tailed lemur
+ 384: indri
+ 385: Asian elephant
+ 386: African bush elephant
+ 387: red panda
+ 388: giant panda
+ 389: snoek
+ 390: eel
+ 391: coho salmon
+ 392: rock beauty
+ 393: clownfish
+ 394: sturgeon
+ 395: garfish
+ 396: lionfish
+ 397: pufferfish
+ 398: abacus
+ 399: abaya
+ 400: academic gown
+ 401: accordion
+ 402: acoustic guitar
+ 403: aircraft carrier
+ 404: airliner
+ 405: airship
+ 406: altar
+ 407: ambulance
+ 408: amphibious vehicle
+ 409: analog clock
+ 410: apiary
+ 411: apron
+ 412: waste container
+ 413: assault rifle
+ 414: backpack
+ 415: bakery
+ 416: balance beam
+ 417: balloon
+ 418: ballpoint pen
+ 419: Band-Aid
+ 420: banjo
+ 421: baluster
+ 422: barbell
+ 423: barber chair
+ 424: barbershop
+ 425: barn
+ 426: barometer
+ 427: barrel
+ 428: wheelbarrow
+ 429: baseball
+ 430: basketball
+ 431: bassinet
+ 432: bassoon
+ 433: swimming cap
+ 434: bath towel
+ 435: bathtub
+ 436: station wagon
+ 437: lighthouse
+ 438: beaker
+ 439: military cap
+ 440: beer bottle
+ 441: beer glass
+ 442: bell-cot
+ 443: bib
+ 444: tandem bicycle
+ 445: bikini
+ 446: ring binder
+ 447: binoculars
+ 448: birdhouse
+ 449: boathouse
+ 450: bobsleigh
+ 451: bolo tie
+ 452: poke bonnet
+ 453: bookcase
+ 454: bookstore
+ 455: bottle cap
+ 456: bow
+ 457: bow tie
+ 458: brass
+ 459: bra
+ 460: breakwater
+ 461: breastplate
+ 462: broom
+ 463: bucket
+ 464: buckle
+ 465: bulletproof vest
+ 466: high-speed train
+ 467: butcher shop
+ 468: taxicab
+ 469: cauldron
+ 470: candle
+ 471: cannon
+ 472: canoe
+ 473: can opener
+ 474: cardigan
+ 475: car mirror
+ 476: carousel
+ 477: tool kit
+ 478: carton
+ 479: car wheel
+ 480: automated teller machine
+ 481: cassette
+ 482: cassette player
+ 483: castle
+ 484: catamaran
+ 485: CD player
+ 486: cello
+ 487: mobile phone
+ 488: chain
+ 489: chain-link fence
+ 490: chain mail
+ 491: chainsaw
+ 492: chest
+ 493: chiffonier
+ 494: chime
+ 495: china cabinet
+ 496: Christmas stocking
+ 497: church
+ 498: movie theater
+ 499: cleaver
+ 500: cliff dwelling
+ 501: cloak
+ 502: clogs
+ 503: cocktail shaker
+ 504: coffee mug
+ 505: coffeemaker
+ 506: coil
+ 507: combination lock
+ 508: computer keyboard
+ 509: confectionery store
+ 510: container ship
+ 511: convertible
+ 512: corkscrew
+ 513: cornet
+ 514: cowboy boot
+ 515: cowboy hat
+ 516: cradle
+ 517: crane (machine)
+ 518: crash helmet
+ 519: crate
+ 520: infant bed
+ 521: Crock Pot
+ 522: croquet ball
+ 523: crutch
+ 524: cuirass
+ 525: dam
+ 526: desk
+ 527: desktop computer
+ 528: rotary dial telephone
+ 529: diaper
+ 530: digital clock
+ 531: digital watch
+ 532: dining table
+ 533: dishcloth
+ 534: dishwasher
+ 535: disc brake
+ 536: dock
+ 537: dog sled
+ 538: dome
+ 539: doormat
+ 540: drilling rig
+ 541: drum
+ 542: drumstick
+ 543: dumbbell
+ 544: Dutch oven
+ 545: electric fan
+ 546: electric guitar
+ 547: electric locomotive
+ 548: entertainment center
+ 549: envelope
+ 550: espresso machine
+ 551: face powder
+ 552: feather boa
+ 553: filing cabinet
+ 554: fireboat
+ 555: fire engine
+ 556: fire screen sheet
+ 557: flagpole
+ 558: flute
+ 559: folding chair
+ 560: football helmet
+ 561: forklift
+ 562: fountain
+ 563: fountain pen
+ 564: four-poster bed
+ 565: freight car
+ 566: French horn
+ 567: frying pan
+ 568: fur coat
+ 569: garbage truck
+ 570: gas mask
+ 571: gas pump
+ 572: goblet
+ 573: go-kart
+ 574: golf ball
+ 575: golf cart
+ 576: gondola
+ 577: gong
+ 578: gown
+ 579: grand piano
+ 580: greenhouse
+ 581: grille
+ 582: grocery store
+ 583: guillotine
+ 584: barrette
+ 585: hair spray
+ 586: half-track
+ 587: hammer
+ 588: hamper
+ 589: hair dryer
+ 590: hand-held computer
+ 591: handkerchief
+ 592: hard disk drive
+ 593: harmonica
+ 594: harp
+ 595: harvester
+ 596: hatchet
+ 597: holster
+ 598: home theater
+ 599: honeycomb
+ 600: hook
+ 601: hoop skirt
+ 602: horizontal bar
+ 603: horse-drawn vehicle
+ 604: hourglass
+ 605: iPod
+ 606: clothes iron
+ 607: jack-o'-lantern
+ 608: jeans
+ 609: jeep
+ 610: T-shirt
+ 611: jigsaw puzzle
+ 612: pulled rickshaw
+ 613: joystick
+ 614: kimono
+ 615: knee pad
+ 616: knot
+ 617: lab coat
+ 618: ladle
+ 619: lampshade
+ 620: laptop computer
+ 621: lawn mower
+ 622: lens cap
+ 623: paper knife
+ 624: library
+ 625: lifeboat
+ 626: lighter
+ 627: limousine
+ 628: ocean liner
+ 629: lipstick
+ 630: slip-on shoe
+ 631: lotion
+ 632: speaker
+ 633: loupe
+ 634: sawmill
+ 635: magnetic compass
+ 636: mail bag
+ 637: mailbox
+ 638: tights
+ 639: tank suit
+ 640: manhole cover
+ 641: maraca
+ 642: marimba
+ 643: mask
+ 644: match
+ 645: maypole
+ 646: maze
+ 647: measuring cup
+ 648: medicine chest
+ 649: megalith
+ 650: microphone
+ 651: microwave oven
+ 652: military uniform
+ 653: milk can
+ 654: minibus
+ 655: miniskirt
+ 656: minivan
+ 657: missile
+ 658: mitten
+ 659: mixing bowl
+ 660: mobile home
+ 661: Model T
+ 662: modem
+ 663: monastery
+ 664: monitor
+ 665: moped
+ 666: mortar
+ 667: square academic cap
+ 668: mosque
+ 669: mosquito net
+ 670: scooter
+ 671: mountain bike
+ 672: tent
+ 673: computer mouse
+ 674: mousetrap
+ 675: moving van
+ 676: muzzle
+ 677: nail
+ 678: neck brace
+ 679: necklace
+ 680: nipple
+ 681: notebook computer
+ 682: obelisk
+ 683: oboe
+ 684: ocarina
+ 685: odometer
+ 686: oil filter
+ 687: organ
+ 688: oscilloscope
+ 689: overskirt
+ 690: bullock cart
+ 691: oxygen mask
+ 692: packet
+ 693: paddle
+ 694: paddle wheel
+ 695: padlock
+ 696: paintbrush
+ 697: pajamas
+ 698: palace
+ 699: pan flute
+ 700: paper towel
+ 701: parachute
+ 702: parallel bars
+ 703: park bench
+ 704: parking meter
+ 705: passenger car
+ 706: patio
+ 707: payphone
+ 708: pedestal
+ 709: pencil case
+ 710: pencil sharpener
+ 711: perfume
+ 712: Petri dish
+ 713: photocopier
+ 714: plectrum
+ 715: Pickelhaube
+ 716: picket fence
+ 717: pickup truck
+ 718: pier
+ 719: piggy bank
+ 720: pill bottle
+ 721: pillow
+ 722: ping-pong ball
+ 723: pinwheel
+ 724: pirate ship
+ 725: pitcher
+ 726: hand plane
+ 727: planetarium
+ 728: plastic bag
+ 729: plate rack
+ 730: plow
+ 731: plunger
+ 732: Polaroid camera
+ 733: pole
+ 734: police van
+ 735: poncho
+ 736: billiard table
+ 737: soda bottle
+ 738: pot
+ 739: potter's wheel
+ 740: power drill
+ 741: prayer rug
+ 742: printer
+ 743: prison
+ 744: projectile
+ 745: projector
+ 746: hockey puck
+ 747: punching bag
+ 748: purse
+ 749: quill
+ 750: quilt
+ 751: race car
+ 752: racket
+ 753: radiator
+ 754: radio
+ 755: radio telescope
+ 756: rain barrel
+ 757: recreational vehicle
+ 758: reel
+ 759: reflex camera
+ 760: refrigerator
+ 761: remote control
+ 762: restaurant
+ 763: revolver
+ 764: rifle
+ 765: rocking chair
+ 766: rotisserie
+ 767: eraser
+ 768: rugby ball
+ 769: ruler
+ 770: running shoe
+ 771: safe
+ 772: safety pin
+ 773: salt shaker
+ 774: sandal
+ 775: sarong
+ 776: saxophone
+ 777: scabbard
+ 778: weighing scale
+ 779: school bus
+ 780: schooner
+ 781: scoreboard
+ 782: CRT screen
+ 783: screw
+ 784: screwdriver
+ 785: seat belt
+ 786: sewing machine
+ 787: shield
+ 788: shoe store
+ 789: shoji
+ 790: shopping basket
+ 791: shopping cart
+ 792: shovel
+ 793: shower cap
+ 794: shower curtain
+ 795: ski
+ 796: ski mask
+ 797: sleeping bag
+ 798: slide rule
+ 799: sliding door
+ 800: slot machine
+ 801: snorkel
+ 802: snowmobile
+ 803: snowplow
+ 804: soap dispenser
+ 805: soccer ball
+ 806: sock
+ 807: solar thermal collector
+ 808: sombrero
+ 809: soup bowl
+ 810: space bar
+ 811: space heater
+ 812: space shuttle
+ 813: spatula
+ 814: motorboat
+ 815: spider web
+ 816: spindle
+ 817: sports car
+ 818: spotlight
+ 819: stage
+ 820: steam locomotive
+ 821: through arch bridge
+ 822: steel drum
+ 823: stethoscope
+ 824: scarf
+ 825: stone wall
+ 826: stopwatch
+ 827: stove
+ 828: strainer
+ 829: tram
+ 830: stretcher
+ 831: couch
+ 832: stupa
+ 833: submarine
+ 834: suit
+ 835: sundial
+ 836: sunglass
+ 837: sunglasses
+ 838: sunscreen
+ 839: suspension bridge
+ 840: mop
+ 841: sweatshirt
+ 842: swimsuit
+ 843: swing
+ 844: switch
+ 845: syringe
+ 846: table lamp
+ 847: tank
+ 848: tape player
+ 849: teapot
+ 850: teddy bear
+ 851: television
+ 852: tennis ball
+ 853: thatched roof
+ 854: front curtain
+ 855: thimble
+ 856: threshing machine
+ 857: throne
+ 858: tile roof
+ 859: toaster
+ 860: tobacco shop
+ 861: toilet seat
+ 862: torch
+ 863: totem pole
+ 864: tow truck
+ 865: toy store
+ 866: tractor
+ 867: semi-trailer truck
+ 868: tray
+ 869: trench coat
+ 870: tricycle
+ 871: trimaran
+ 872: tripod
+ 873: triumphal arch
+ 874: trolleybus
+ 875: trombone
+ 876: tub
+ 877: turnstile
+ 878: typewriter keyboard
+ 879: umbrella
+ 880: unicycle
+ 881: upright piano
+ 882: vacuum cleaner
+ 883: vase
+ 884: vault
+ 885: velvet
+ 886: vending machine
+ 887: vestment
+ 888: viaduct
+ 889: violin
+ 890: volleyball
+ 891: waffle iron
+ 892: wall clock
+ 893: wallet
+ 894: wardrobe
+ 895: military aircraft
+ 896: sink
+ 897: washing machine
+ 898: water bottle
+ 899: water jug
+ 900: water tower
+ 901: whiskey jug
+ 902: whistle
+ 903: wig
+ 904: window screen
+ 905: window shade
+ 906: Windsor tie
+ 907: wine bottle
+ 908: wing
+ 909: wok
+ 910: wooden spoon
+ 911: wool
+ 912: split-rail fence
+ 913: shipwreck
+ 914: yawl
+ 915: yurt
+ 916: website
+ 917: comic book
+ 918: crossword
+ 919: traffic sign
+ 920: traffic light
+ 921: dust jacket
+ 922: menu
+ 923: plate
+ 924: guacamole
+ 925: consomme
+ 926: hot pot
+ 927: trifle
+ 928: ice cream
+ 929: ice pop
+ 930: baguette
+ 931: bagel
+ 932: pretzel
+ 933: cheeseburger
+ 934: hot dog
+ 935: mashed potato
+ 936: cabbage
+ 937: broccoli
+ 938: cauliflower
+ 939: zucchini
+ 940: spaghetti squash
+ 941: acorn squash
+ 942: butternut squash
+ 943: cucumber
+ 944: artichoke
+ 945: bell pepper
+ 946: cardoon
+ 947: mushroom
+ 948: Granny Smith
+ 949: strawberry
+ 950: orange
+ 951: lemon
+ 952: fig
+ 953: pineapple
+ 954: banana
+ 955: jackfruit
+ 956: custard apple
+ 957: pomegranate
+ 958: hay
+ 959: carbonara
+ 960: chocolate syrup
+ 961: dough
+ 962: meatloaf
+ 963: pizza
+ 964: pot pie
+ 965: burrito
+ 966: red wine
+ 967: espresso
+ 968: cup
+ 969: eggnog
+ 970: alp
+ 971: bubble
+ 972: cliff
+ 973: coral reef
+ 974: geyser
+ 975: lakeshore
+ 976: promontory
+ 977: shoal
+ 978: seashore
+ 979: valley
+ 980: volcano
+ 981: baseball player
+ 982: bridegroom
+ 983: scuba diver
+ 984: rapeseed
+ 985: daisy
+ 986: yellow lady's slipper
+ 987: corn
+ 988: acorn
+ 989: rose hip
+ 990: horse chestnut seed
+ 991: coral fungus
+ 992: agaric
+ 993: gyromitra
+ 994: stinkhorn mushroom
+ 995: earth star
+ 996: hen-of-the-woods
+ 997: bolete
+ 998: ear
+ 999: toilet paper
+
+
+# Download script/URL (optional)
+download: data/scripts/get_imagenet.sh
diff --git a/data/Objects365.yaml b/data/Objects365.yaml
index 4cc94753f530..05b26a1f4796 100644
--- a/data/Objects365.yaml
+++ b/data/Objects365.yaml
@@ -14,48 +14,372 @@ val: images/val # val images (relative to 'path') 80000 images
test: # test images (optional)
# Classes
-nc: 365 # number of classes
-names: ['Person', 'Sneakers', 'Chair', 'Other Shoes', 'Hat', 'Car', 'Lamp', 'Glasses', 'Bottle', 'Desk', 'Cup',
- 'Street Lights', 'Cabinet/shelf', 'Handbag/Satchel', 'Bracelet', 'Plate', 'Picture/Frame', 'Helmet', 'Book',
- 'Gloves', 'Storage box', 'Boat', 'Leather Shoes', 'Flower', 'Bench', 'Potted Plant', 'Bowl/Basin', 'Flag',
- 'Pillow', 'Boots', 'Vase', 'Microphone', 'Necklace', 'Ring', 'SUV', 'Wine Glass', 'Belt', 'Monitor/TV',
- 'Backpack', 'Umbrella', 'Traffic Light', 'Speaker', 'Watch', 'Tie', 'Trash bin Can', 'Slippers', 'Bicycle',
- 'Stool', 'Barrel/bucket', 'Van', 'Couch', 'Sandals', 'Basket', 'Drum', 'Pen/Pencil', 'Bus', 'Wild Bird',
- 'High Heels', 'Motorcycle', 'Guitar', 'Carpet', 'Cell Phone', 'Bread', 'Camera', 'Canned', 'Truck',
- 'Traffic cone', 'Cymbal', 'Lifesaver', 'Towel', 'Stuffed Toy', 'Candle', 'Sailboat', 'Laptop', 'Awning',
- 'Bed', 'Faucet', 'Tent', 'Horse', 'Mirror', 'Power outlet', 'Sink', 'Apple', 'Air Conditioner', 'Knife',
- 'Hockey Stick', 'Paddle', 'Pickup Truck', 'Fork', 'Traffic Sign', 'Balloon', 'Tripod', 'Dog', 'Spoon', 'Clock',
- 'Pot', 'Cow', 'Cake', 'Dinning Table', 'Sheep', 'Hanger', 'Blackboard/Whiteboard', 'Napkin', 'Other Fish',
- 'Orange/Tangerine', 'Toiletry', 'Keyboard', 'Tomato', 'Lantern', 'Machinery Vehicle', 'Fan',
- 'Green Vegetables', 'Banana', 'Baseball Glove', 'Airplane', 'Mouse', 'Train', 'Pumpkin', 'Soccer', 'Skiboard',
- 'Luggage', 'Nightstand', 'Tea pot', 'Telephone', 'Trolley', 'Head Phone', 'Sports Car', 'Stop Sign',
- 'Dessert', 'Scooter', 'Stroller', 'Crane', 'Remote', 'Refrigerator', 'Oven', 'Lemon', 'Duck', 'Baseball Bat',
- 'Surveillance Camera', 'Cat', 'Jug', 'Broccoli', 'Piano', 'Pizza', 'Elephant', 'Skateboard', 'Surfboard',
- 'Gun', 'Skating and Skiing shoes', 'Gas stove', 'Donut', 'Bow Tie', 'Carrot', 'Toilet', 'Kite', 'Strawberry',
- 'Other Balls', 'Shovel', 'Pepper', 'Computer Box', 'Toilet Paper', 'Cleaning Products', 'Chopsticks',
- 'Microwave', 'Pigeon', 'Baseball', 'Cutting/chopping Board', 'Coffee Table', 'Side Table', 'Scissors',
- 'Marker', 'Pie', 'Ladder', 'Snowboard', 'Cookies', 'Radiator', 'Fire Hydrant', 'Basketball', 'Zebra', 'Grape',
- 'Giraffe', 'Potato', 'Sausage', 'Tricycle', 'Violin', 'Egg', 'Fire Extinguisher', 'Candy', 'Fire Truck',
- 'Billiards', 'Converter', 'Bathtub', 'Wheelchair', 'Golf Club', 'Briefcase', 'Cucumber', 'Cigar/Cigarette',
- 'Paint Brush', 'Pear', 'Heavy Truck', 'Hamburger', 'Extractor', 'Extension Cord', 'Tong', 'Tennis Racket',
- 'Folder', 'American Football', 'earphone', 'Mask', 'Kettle', 'Tennis', 'Ship', 'Swing', 'Coffee Machine',
- 'Slide', 'Carriage', 'Onion', 'Green beans', 'Projector', 'Frisbee', 'Washing Machine/Drying Machine',
- 'Chicken', 'Printer', 'Watermelon', 'Saxophone', 'Tissue', 'Toothbrush', 'Ice cream', 'Hot-air balloon',
- 'Cello', 'French Fries', 'Scale', 'Trophy', 'Cabbage', 'Hot dog', 'Blender', 'Peach', 'Rice', 'Wallet/Purse',
- 'Volleyball', 'Deer', 'Goose', 'Tape', 'Tablet', 'Cosmetics', 'Trumpet', 'Pineapple', 'Golf Ball',
- 'Ambulance', 'Parking meter', 'Mango', 'Key', 'Hurdle', 'Fishing Rod', 'Medal', 'Flute', 'Brush', 'Penguin',
- 'Megaphone', 'Corn', 'Lettuce', 'Garlic', 'Swan', 'Helicopter', 'Green Onion', 'Sandwich', 'Nuts',
- 'Speed Limit Sign', 'Induction Cooker', 'Broom', 'Trombone', 'Plum', 'Rickshaw', 'Goldfish', 'Kiwi fruit',
- 'Router/modem', 'Poker Card', 'Toaster', 'Shrimp', 'Sushi', 'Cheese', 'Notepaper', 'Cherry', 'Pliers', 'CD',
- 'Pasta', 'Hammer', 'Cue', 'Avocado', 'Hamimelon', 'Flask', 'Mushroom', 'Screwdriver', 'Soap', 'Recorder',
- 'Bear', 'Eggplant', 'Board Eraser', 'Coconut', 'Tape Measure/Ruler', 'Pig', 'Showerhead', 'Globe', 'Chips',
- 'Steak', 'Crosswalk Sign', 'Stapler', 'Camel', 'Formula 1', 'Pomegranate', 'Dishwasher', 'Crab',
- 'Hoverboard', 'Meat ball', 'Rice Cooker', 'Tuba', 'Calculator', 'Papaya', 'Antelope', 'Parrot', 'Seal',
- 'Butterfly', 'Dumbbell', 'Donkey', 'Lion', 'Urinal', 'Dolphin', 'Electric Drill', 'Hair Dryer', 'Egg tart',
- 'Jellyfish', 'Treadmill', 'Lighter', 'Grapefruit', 'Game board', 'Mop', 'Radish', 'Baozi', 'Target', 'French',
- 'Spring Rolls', 'Monkey', 'Rabbit', 'Pencil Case', 'Yak', 'Red Cabbage', 'Binoculars', 'Asparagus', 'Barbell',
- 'Scallop', 'Noddles', 'Comb', 'Dumpling', 'Oyster', 'Table Tennis paddle', 'Cosmetics Brush/Eyeliner Pencil',
- 'Chainsaw', 'Eraser', 'Lobster', 'Durian', 'Okra', 'Lipstick', 'Cosmetics Mirror', 'Curling', 'Table Tennis']
+names:
+ 0: Person
+ 1: Sneakers
+ 2: Chair
+ 3: Other Shoes
+ 4: Hat
+ 5: Car
+ 6: Lamp
+ 7: Glasses
+ 8: Bottle
+ 9: Desk
+ 10: Cup
+ 11: Street Lights
+ 12: Cabinet/shelf
+ 13: Handbag/Satchel
+ 14: Bracelet
+ 15: Plate
+ 16: Picture/Frame
+ 17: Helmet
+ 18: Book
+ 19: Gloves
+ 20: Storage box
+ 21: Boat
+ 22: Leather Shoes
+ 23: Flower
+ 24: Bench
+ 25: Potted Plant
+ 26: Bowl/Basin
+ 27: Flag
+ 28: Pillow
+ 29: Boots
+ 30: Vase
+ 31: Microphone
+ 32: Necklace
+ 33: Ring
+ 34: SUV
+ 35: Wine Glass
+ 36: Belt
+ 37: Monitor/TV
+ 38: Backpack
+ 39: Umbrella
+ 40: Traffic Light
+ 41: Speaker
+ 42: Watch
+ 43: Tie
+ 44: Trash bin Can
+ 45: Slippers
+ 46: Bicycle
+ 47: Stool
+ 48: Barrel/bucket
+ 49: Van
+ 50: Couch
+ 51: Sandals
+ 52: Basket
+ 53: Drum
+ 54: Pen/Pencil
+ 55: Bus
+ 56: Wild Bird
+ 57: High Heels
+ 58: Motorcycle
+ 59: Guitar
+ 60: Carpet
+ 61: Cell Phone
+ 62: Bread
+ 63: Camera
+ 64: Canned
+ 65: Truck
+ 66: Traffic cone
+ 67: Cymbal
+ 68: Lifesaver
+ 69: Towel
+ 70: Stuffed Toy
+ 71: Candle
+ 72: Sailboat
+ 73: Laptop
+ 74: Awning
+ 75: Bed
+ 76: Faucet
+ 77: Tent
+ 78: Horse
+ 79: Mirror
+ 80: Power outlet
+ 81: Sink
+ 82: Apple
+ 83: Air Conditioner
+ 84: Knife
+ 85: Hockey Stick
+ 86: Paddle
+ 87: Pickup Truck
+ 88: Fork
+ 89: Traffic Sign
+ 90: Balloon
+ 91: Tripod
+ 92: Dog
+ 93: Spoon
+ 94: Clock
+ 95: Pot
+ 96: Cow
+ 97: Cake
+ 98: Dinning Table
+ 99: Sheep
+ 100: Hanger
+ 101: Blackboard/Whiteboard
+ 102: Napkin
+ 103: Other Fish
+ 104: Orange/Tangerine
+ 105: Toiletry
+ 106: Keyboard
+ 107: Tomato
+ 108: Lantern
+ 109: Machinery Vehicle
+ 110: Fan
+ 111: Green Vegetables
+ 112: Banana
+ 113: Baseball Glove
+ 114: Airplane
+ 115: Mouse
+ 116: Train
+ 117: Pumpkin
+ 118: Soccer
+ 119: Skiboard
+ 120: Luggage
+ 121: Nightstand
+ 122: Tea pot
+ 123: Telephone
+ 124: Trolley
+ 125: Head Phone
+ 126: Sports Car
+ 127: Stop Sign
+ 128: Dessert
+ 129: Scooter
+ 130: Stroller
+ 131: Crane
+ 132: Remote
+ 133: Refrigerator
+ 134: Oven
+ 135: Lemon
+ 136: Duck
+ 137: Baseball Bat
+ 138: Surveillance Camera
+ 139: Cat
+ 140: Jug
+ 141: Broccoli
+ 142: Piano
+ 143: Pizza
+ 144: Elephant
+ 145: Skateboard
+ 146: Surfboard
+ 147: Gun
+ 148: Skating and Skiing shoes
+ 149: Gas stove
+ 150: Donut
+ 151: Bow Tie
+ 152: Carrot
+ 153: Toilet
+ 154: Kite
+ 155: Strawberry
+ 156: Other Balls
+ 157: Shovel
+ 158: Pepper
+ 159: Computer Box
+ 160: Toilet Paper
+ 161: Cleaning Products
+ 162: Chopsticks
+ 163: Microwave
+ 164: Pigeon
+ 165: Baseball
+ 166: Cutting/chopping Board
+ 167: Coffee Table
+ 168: Side Table
+ 169: Scissors
+ 170: Marker
+ 171: Pie
+ 172: Ladder
+ 173: Snowboard
+ 174: Cookies
+ 175: Radiator
+ 176: Fire Hydrant
+ 177: Basketball
+ 178: Zebra
+ 179: Grape
+ 180: Giraffe
+ 181: Potato
+ 182: Sausage
+ 183: Tricycle
+ 184: Violin
+ 185: Egg
+ 186: Fire Extinguisher
+ 187: Candy
+ 188: Fire Truck
+ 189: Billiards
+ 190: Converter
+ 191: Bathtub
+ 192: Wheelchair
+ 193: Golf Club
+ 194: Briefcase
+ 195: Cucumber
+ 196: Cigar/Cigarette
+ 197: Paint Brush
+ 198: Pear
+ 199: Heavy Truck
+ 200: Hamburger
+ 201: Extractor
+ 202: Extension Cord
+ 203: Tong
+ 204: Tennis Racket
+ 205: Folder
+ 206: American Football
+ 207: earphone
+ 208: Mask
+ 209: Kettle
+ 210: Tennis
+ 211: Ship
+ 212: Swing
+ 213: Coffee Machine
+ 214: Slide
+ 215: Carriage
+ 216: Onion
+ 217: Green beans
+ 218: Projector
+ 219: Frisbee
+ 220: Washing Machine/Drying Machine
+ 221: Chicken
+ 222: Printer
+ 223: Watermelon
+ 224: Saxophone
+ 225: Tissue
+ 226: Toothbrush
+ 227: Ice cream
+ 228: Hot-air balloon
+ 229: Cello
+ 230: French Fries
+ 231: Scale
+ 232: Trophy
+ 233: Cabbage
+ 234: Hot dog
+ 235: Blender
+ 236: Peach
+ 237: Rice
+ 238: Wallet/Purse
+ 239: Volleyball
+ 240: Deer
+ 241: Goose
+ 242: Tape
+ 243: Tablet
+ 244: Cosmetics
+ 245: Trumpet
+ 246: Pineapple
+ 247: Golf Ball
+ 248: Ambulance
+ 249: Parking meter
+ 250: Mango
+ 251: Key
+ 252: Hurdle
+ 253: Fishing Rod
+ 254: Medal
+ 255: Flute
+ 256: Brush
+ 257: Penguin
+ 258: Megaphone
+ 259: Corn
+ 260: Lettuce
+ 261: Garlic
+ 262: Swan
+ 263: Helicopter
+ 264: Green Onion
+ 265: Sandwich
+ 266: Nuts
+ 267: Speed Limit Sign
+ 268: Induction Cooker
+ 269: Broom
+ 270: Trombone
+ 271: Plum
+ 272: Rickshaw
+ 273: Goldfish
+ 274: Kiwi fruit
+ 275: Router/modem
+ 276: Poker Card
+ 277: Toaster
+ 278: Shrimp
+ 279: Sushi
+ 280: Cheese
+ 281: Notepaper
+ 282: Cherry
+ 283: Pliers
+ 284: CD
+ 285: Pasta
+ 286: Hammer
+ 287: Cue
+ 288: Avocado
+ 289: Hamimelon
+ 290: Flask
+ 291: Mushroom
+ 292: Screwdriver
+ 293: Soap
+ 294: Recorder
+ 295: Bear
+ 296: Eggplant
+ 297: Board Eraser
+ 298: Coconut
+ 299: Tape Measure/Ruler
+ 300: Pig
+ 301: Showerhead
+ 302: Globe
+ 303: Chips
+ 304: Steak
+ 305: Crosswalk Sign
+ 306: Stapler
+ 307: Camel
+ 308: Formula 1
+ 309: Pomegranate
+ 310: Dishwasher
+ 311: Crab
+ 312: Hoverboard
+ 313: Meat ball
+ 314: Rice Cooker
+ 315: Tuba
+ 316: Calculator
+ 317: Papaya
+ 318: Antelope
+ 319: Parrot
+ 320: Seal
+ 321: Butterfly
+ 322: Dumbbell
+ 323: Donkey
+ 324: Lion
+ 325: Urinal
+ 326: Dolphin
+ 327: Electric Drill
+ 328: Hair Dryer
+ 329: Egg tart
+ 330: Jellyfish
+ 331: Treadmill
+ 332: Lighter
+ 333: Grapefruit
+ 334: Game board
+ 335: Mop
+ 336: Radish
+ 337: Baozi
+ 338: Target
+ 339: French
+ 340: Spring Rolls
+ 341: Monkey
+ 342: Rabbit
+ 343: Pencil Case
+ 344: Yak
+ 345: Red Cabbage
+ 346: Binoculars
+ 347: Asparagus
+ 348: Barbell
+ 349: Scallop
+ 350: Noddles
+ 351: Comb
+ 352: Dumpling
+ 353: Oyster
+ 354: Table Tennis paddle
+ 355: Cosmetics Brush/Eyeliner Pencil
+ 356: Chainsaw
+ 357: Eraser
+ 358: Lobster
+ 359: Durian
+ 360: Okra
+ 361: Lipstick
+ 362: Cosmetics Mirror
+ 363: Curling
+ 364: Table Tennis
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/SKU-110K.yaml b/data/SKU-110K.yaml
index 2acf34d155bd..edae7171c660 100644
--- a/data/SKU-110K.yaml
+++ b/data/SKU-110K.yaml
@@ -14,8 +14,8 @@ val: val.txt # val images (relative to 'path') 588 images
test: test.txt # test images (optional) 2936 images
# Classes
-nc: 1 # number of classes
-names: ['object'] # class names
+names:
+ 0: object
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/VOC.yaml b/data/VOC.yaml
index 636ddc42d46c..27d38109c53a 100644
--- a/data/VOC.yaml
+++ b/data/VOC.yaml
@@ -20,9 +20,27 @@ test: # test images (optional)
- images/test2007
# Classes
-nc: 20 # number of classes
-names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
- 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'] # class names
+names:
+ 0: aeroplane
+ 1: bicycle
+ 2: bird
+ 3: boat
+ 4: bottle
+ 5: bus
+ 6: car
+ 7: cat
+ 8: chair
+ 9: cow
+ 10: diningtable
+ 11: dog
+ 12: horse
+ 13: motorbike
+ 14: person
+ 15: pottedplant
+ 16: sheep
+ 17: sofa
+ 18: train
+ 19: tvmonitor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
@@ -47,12 +65,13 @@ download: |
w = int(size.find('width').text)
h = int(size.find('height').text)
+ names = list(yaml['names'].values()) # names list
for obj in root.iter('object'):
cls = obj.find('name').text
- if cls in yaml['names'] and not int(obj.find('difficult').text) == 1:
+ if cls in names and int(obj.find('difficult').text) != 1:
xmlbox = obj.find('bndbox')
bb = convert_box((w, h), [float(xmlbox.find(x).text) for x in ('xmin', 'xmax', 'ymin', 'ymax')])
- cls_id = yaml['names'].index(cls) # class id
+ cls_id = names.index(cls) # class id
out_file.write(" ".join([str(a) for a in (cls_id, *bb)]) + '\n')
diff --git a/data/VisDrone.yaml b/data/VisDrone.yaml
index 10337b46f104..a8bcf8e628ec 100644
--- a/data/VisDrone.yaml
+++ b/data/VisDrone.yaml
@@ -14,8 +14,17 @@ val: VisDrone2019-DET-val/images # val images (relative to 'path') 548 images
test: VisDrone2019-DET-test-dev/images # test images (optional) 1610 images
# Classes
-nc: 10 # number of classes
-names: ['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
+names:
+ 0: pedestrian
+ 1: people
+ 2: bicycle
+ 3: car
+ 4: van
+ 5: truck
+ 6: tricycle
+ 7: awning-tricycle
+ 8: bus
+ 9: motor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
diff --git a/data/coco.yaml b/data/coco.yaml
index 0c0c4adab05d..d64dfc7fed76 100644
--- a/data/coco.yaml
+++ b/data/coco.yaml
@@ -14,16 +14,87 @@ val: val2017.txt # val images (relative to 'path') 5000 images
test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
# Classes
-nc: 80 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
# Download script/URL (optional)
diff --git a/data/coco128-seg.yaml b/data/coco128-seg.yaml
new file mode 100644
index 000000000000..5e81910cc456
--- /dev/null
+++ b/data/coco128-seg.yaml
@@ -0,0 +1,101 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# COCO128-seg dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
+# Example usage: python train.py --data coco128.yaml
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco128-seg ← downloads here (7 MB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/coco128-seg # dataset root dir
+train: images/train2017 # train images (relative to 'path') 128 images
+val: images/train2017 # val images (relative to 'path') 128 images
+test: # test images (optional)
+
+# Classes
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
+
+
+# Download script/URL (optional)
+download: https://ultralytics.com/assets/coco128-seg.zip
diff --git a/data/coco128.yaml b/data/coco128.yaml
index 2517d2079257..12556736a571 100644
--- a/data/coco128.yaml
+++ b/data/coco128.yaml
@@ -14,16 +14,87 @@ val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
-nc: 80 # number of classes
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush'] # class names
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
# Download script/URL (optional)
diff --git a/data/hyps/hyp.no-augmentation.yaml b/data/hyps/hyp.no-augmentation.yaml
new file mode 100644
index 000000000000..8fbd5b262afa
--- /dev/null
+++ b/data/hyps/hyp.no-augmentation.yaml
@@ -0,0 +1,35 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters when using Albumentations frameworks
+# python train.py --hyp hyp.no-augmentation.yaml
+# See https://github.com/ultralytics/yolov5/pull/3882 for YOLOv5 + Albumentations Usage examples
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+# this parameters are all zero since we want to use albumentation framework
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0 # image HSV-Hue augmentation (fraction)
+hsv_s: 00 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0 # image translation (+/- fraction)
+scale: 0 # image scale (+/- gain)
+shear: 0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.0 # image flip left-right (probability)
+mosaic: 0.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/data/scripts/download_weights.sh b/data/scripts/download_weights.sh
index e9fa65394178..31e0a15569f2 100755
--- a/data/scripts/download_weights.sh
+++ b/data/scripts/download_weights.sh
@@ -1,7 +1,7 @@
#!/bin/bash
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Download latest models from https://github.com/ultralytics/yolov5/releases
-# Example usage: bash path/to/download_weights.sh
+# Example usage: bash data/scripts/download_weights.sh
# parent
# └── yolov5
# ├── yolov5s.pt ← downloads here
@@ -11,10 +11,12 @@
python - <\n",
+ "\n",
+ "\n",
+ "\n",
+ " "
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "0eq1SMWl6Sfn"
+ },
+ "source": [
+ "# 2. Validate\n",
+ "Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "WQPtK1QYVaD_",
+ "outputId": "9d751d8c-bee8-4339-cf30-9854ca530449"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "Downloading https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip ...\n",
+ "Downloading http://images.cocodataset.org/zips/val2017.zip ...\n",
+ "######################################################################## 100.0%\n",
+ "######################################################################## 100.0%\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Download COCO val\n",
+ "!bash data/scripts/get_coco.sh --val --segments # download (780M - 5000 images)"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "X58w8JLpMnjH",
+ "outputId": "a140d67a-02da-479e-9ddb-7d54bf9e407a"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "\u001b[34m\u001b[1msegment/val: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s-seg.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val-seg, name=exp, exist_ok=False, half=True, dnn=False\n",
+ "YOLOv5 🚀 v7.0-2-gc9d47ae Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
+ "\n",
+ "Fusing layers... \n",
+ "YOLOv5s-seg summary: 224 layers, 7611485 parameters, 0 gradients, 26.4 GFLOPs\n",
+ "\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:03<00:00, 1361.31it/s]\n",
+ "\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
+ " Class Images Instances Box(P R mAP50 mAP50-95) Mask(P R mAP50 mAP50-95): 100% 157/157 [01:54<00:00, 1.37it/s]\n",
+ " all 5000 36335 0.673 0.517 0.566 0.373 0.672 0.49 0.532 0.319\n",
+ "Speed: 0.6ms pre-process, 4.4ms inference, 2.9ms NMS per image at shape (32, 3, 640, 640)\n",
+ "Results saved to \u001b[1mruns/val-seg/exp\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Validate YOLOv5s-seg on COCO val\n",
+ "!python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 --half"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "ZY2VXXXu74w5"
+ },
+ "source": [
+ "# 3. Train\n",
+ "\n",
+ "
"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "0eq1SMWl6Sfn"
+ },
+ "source": [
+ "# 2. Validate\n",
+ "Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "WQPtK1QYVaD_",
+ "outputId": "9d751d8c-bee8-4339-cf30-9854ca530449"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "Downloading https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip ...\n",
+ "Downloading http://images.cocodataset.org/zips/val2017.zip ...\n",
+ "######################################################################## 100.0%\n",
+ "######################################################################## 100.0%\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Download COCO val\n",
+ "!bash data/scripts/get_coco.sh --val --segments # download (780M - 5000 images)"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "X58w8JLpMnjH",
+ "outputId": "a140d67a-02da-479e-9ddb-7d54bf9e407a"
+ },
+ "outputs": [
+ {
+ "output_type": "stream",
+ "name": "stdout",
+ "text": [
+ "\u001b[34m\u001b[1msegment/val: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s-seg.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val-seg, name=exp, exist_ok=False, half=True, dnn=False\n",
+ "YOLOv5 🚀 v7.0-2-gc9d47ae Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
+ "\n",
+ "Fusing layers... \n",
+ "YOLOv5s-seg summary: 224 layers, 7611485 parameters, 0 gradients, 26.4 GFLOPs\n",
+ "\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:03<00:00, 1361.31it/s]\n",
+ "\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
+ " Class Images Instances Box(P R mAP50 mAP50-95) Mask(P R mAP50 mAP50-95): 100% 157/157 [01:54<00:00, 1.37it/s]\n",
+ " all 5000 36335 0.673 0.517 0.566 0.373 0.672 0.49 0.532 0.319\n",
+ "Speed: 0.6ms pre-process, 4.4ms inference, 2.9ms NMS per image at shape (32, 3, 640, 640)\n",
+ "Results saved to \u001b[1mruns/val-seg/exp\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "# Validate YOLOv5s-seg on COCO val\n",
+ "!python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 --half"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "ZY2VXXXu74w5"
+ },
+ "source": [
+ "# 3. Train\n",
+ "\n",
+ "

"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Lay2WsTjNJzP"
+ },
+ "source": [
+ "## ClearML Logging and Automation 🌟 NEW\n",
+ "\n",
+ "[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
+ "\n",
+ "- `pip install clearml`\n",
+ "- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
+ "\n",
+ "You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
+ "\n",
+ "You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://github.com/ultralytics/yolov5/tree/master/utils/loggers/clearml) for details!\n",
+ "\n",
+ "\n",
+ ""
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "-WPvRbS5Swl6"
+ },
+ "source": [
+ "## Local Logging\n",
+ "\n",
+ "Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
+ "\n",
+ "This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
+ "\n",
+ "\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "Zelyeqbyt3GD"
+ },
+ "source": [
+ "# Environments\n",
+ "\n",
+ "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "\n",
+ "- **Notebooks** with free GPU: \n",
+ "- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
+ "- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
+ "- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart) \n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "6Qu7Iesl0p54"
+ },
+ "source": [
+ "# Status\n",
+ "\n",
+ "\n",
+ "\n",
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "IEijrePND_2I"
+ },
+ "source": [
+ "# Appendix\n",
+ "\n",
+ "Additional content below."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": null,
+ "metadata": {
+ "id": "GMusP4OAxFu6"
+ },
+ "outputs": [],
+ "source": [
+ "# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
+ "import torch\n",
+ "\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s-seg') # yolov5n - yolov5x6 or custom\n",
+ "im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
+ "results = model(im) # inference\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
+ ]
+ }
+ ],
+ "metadata": {
+ "accelerator": "GPU",
+ "colab": {
+ "name": "YOLOv5 Segmentation Tutorial",
+ "provenance": [],
+ "toc_visible": true
+ },
+ "kernelspec": {
+ "display_name": "Python 3 (ipykernel)",
+ "language": "python",
+ "name": "python3"
+ },
+ "language_info": {
+ "codemirror_mode": {
+ "name": "ipython",
+ "version": 3
+ },
+ "file_extension": ".py",
+ "mimetype": "text/x-python",
+ "name": "python",
+ "nbconvert_exporter": "python",
+ "pygments_lexer": "ipython3",
+ "version": "3.7.12"
+ }
+ },
+ "nbformat": 4,
+ "nbformat_minor": 0
+}
\ No newline at end of file
diff --git a/segment/val.py b/segment/val.py
new file mode 100644
index 000000000000..5cf8ae8b41c1
--- /dev/null
+++ b/segment/val.py
@@ -0,0 +1,472 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 segment model on a segment dataset
+
+Usage:
+ $ bash data/scripts/get_coco.sh --val --segments # download COCO-segments val split (1G, 5000 images)
+ $ python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 # validate COCO-segments
+
+Usage - formats:
+ $ python segment/val.py --weights yolov5s-seg.pt # PyTorch
+ yolov5s-seg.torchscript # TorchScript
+ yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-seg_openvino_label # OpenVINO
+ yolov5s-seg.engine # TensorRT
+ yolov5s-seg.mlmodel # CoreML (macOS-only)
+ yolov5s-seg_saved_model # TensorFlow SavedModel
+ yolov5s-seg.pb # TensorFlow GraphDef
+ yolov5s-seg.tflite # TensorFlow Lite
+ yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s-seg_paddle_model # PaddlePaddle
+"""
+
+import argparse
+import json
+import os
+import sys
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import torch.nn.functional as F
+
+from models.common import DetectMultiBackend
+from models.yolo import SegmentationModel
+from utils.callbacks import Callbacks
+from utils.general import (LOGGER, NUM_THREADS, TQDM_BAR_FORMAT, Profile, check_dataset, check_img_size,
+ check_requirements, check_yaml, coco80_to_coco91_class, colorstr, increment_path,
+ non_max_suppression, print_args, scale_boxes, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, box_iou
+from utils.plots import output_to_target, plot_val_study
+from utils.segment.dataloaders import create_dataloader
+from utils.segment.general import mask_iou, process_mask, process_mask_native, scale_image
+from utils.segment.metrics import Metrics, ap_per_class_box_and_mask
+from utils.segment.plots import plot_images_and_masks
+from utils.torch_utils import de_parallel, select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map, pred_masks):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ from pycocotools.mask import encode
+
+ def single_encode(x):
+ rle = encode(np.asarray(x[:, :, None], order="F", dtype="uint8"))[0]
+ rle["counts"] = rle["counts"].decode("utf-8")
+ return rle
+
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ pred_masks = np.transpose(pred_masks, (2, 0, 1))
+ with ThreadPool(NUM_THREADS) as pool:
+ rles = pool.map(single_encode, pred_masks)
+ for i, (p, b) in enumerate(zip(predn.tolist(), box.tolist())):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5),
+ 'segmentation': rles[i]})
+
+
+def process_batch(detections, labels, iouv, pred_masks=None, gt_masks=None, overlap=False, masks=False):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ if masks:
+ if overlap:
+ nl = len(labels)
+ index = torch.arange(nl, device=gt_masks.device).view(nl, 1, 1) + 1
+ gt_masks = gt_masks.repeat(nl, 1, 1) # shape(1,640,640) -> (n,640,640)
+ gt_masks = torch.where(gt_masks == index, 1.0, 0.0)
+ if gt_masks.shape[1:] != pred_masks.shape[1:]:
+ gt_masks = F.interpolate(gt_masks[None], pred_masks.shape[1:], mode="bilinear", align_corners=False)[0]
+ gt_masks = gt_masks.gt_(0.5)
+ iou = mask_iou(gt_masks.view(gt_masks.shape[0], -1), pred_masks.view(pred_masks.shape[0], -1))
+ else: # boxes
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val-seg', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ overlap=False,
+ mask_downsample_ratio=1,
+ compute_loss=None,
+ callbacks=Callbacks(),
+):
+ if save_json:
+ check_requirements(['pycocotools'])
+ process = process_mask_native # more accurate
+ else:
+ process = process_mask # faster
+
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ nm = de_parallel(model).model[-1].nm # number of masks
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ nm = de_parallel(model).model.model[-1].nm if isinstance(model, SegmentationModel) else 32 # number of masks
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad, rect = (0.0, False) if task == 'speed' else (0.5, pt) # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '),
+ overlap_mask=overlap,
+ mask_downsample_ratio=mask_downsample_ratio)[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 10) % ('Class', 'Images', 'Instances', 'Box(P', "R", "mAP50", "mAP50-95)", "Mask(P", "R",
+ "mAP50", "mAP50-95)")
+ dt = Profile(), Profile(), Profile()
+ metrics = Metrics()
+ loss = torch.zeros(4, device=device)
+ jdict, stats = [], []
+ # callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
+ for batch_i, (im, targets, paths, shapes, masks) in enumerate(pbar):
+ # callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ masks = masks.to(device)
+ masks = masks.float()
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ preds, protos, train_out = model(im) if compute_loss else (*model(im, augment=augment)[:2], None)
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss((train_out, protos), targets, masks)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ preds = non_max_suppression(preds,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det,
+ nm=nm)
+
+ # Metrics
+ plot_masks = [] # masks for plotting
+ for si, (pred, proto) in enumerate(zip(preds, protos)):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct_masks = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ correct_bboxes = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct_masks, correct_bboxes, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Masks
+ midx = [si] if overlap else targets[:, 0] == si
+ gt_masks = masks[midx]
+ pred_masks = process(proto, pred[:, 6:], pred[:, :4], shape=im[si].shape[1:])
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct_bboxes = process_batch(predn, labelsn, iouv)
+ correct_masks = process_batch(predn, labelsn, iouv, pred_masks, gt_masks, overlap=overlap, masks=True)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct_masks, correct_bboxes, pred[:, 4], pred[:, 5], labels[:, 0])) # (conf, pcls, tcls)
+
+ pred_masks = torch.as_tensor(pred_masks, dtype=torch.uint8)
+ if plots and batch_i < 3:
+ plot_masks.append(pred_masks[:15]) # filter top 15 to plot
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ pred_masks = scale_image(im[si].shape[1:],
+ pred_masks.permute(1, 2, 0).contiguous().cpu().numpy(), shape, shapes[si][1])
+ save_one_json(predn, jdict, path, class_map, pred_masks) # append to COCO-JSON dictionary
+ # callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ if len(plot_masks):
+ plot_masks = torch.cat(plot_masks, dim=0)
+ plot_images_and_masks(im, targets, masks, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names)
+ plot_images_and_masks(im, output_to_target(preds, max_det=15), plot_masks, paths,
+ save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ # callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ results = ap_per_class_box_and_mask(*stats, plot=plots, save_dir=save_dir, names=names)
+ metrics.update(results)
+ nt = np.bincount(stats[4].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 8 # print format
+ LOGGER.info(pf % ("all", seen, nt.sum(), *metrics.mean_results()))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(metrics.ap_class_index):
+ LOGGER.info(pf % (names[c], seen, nt[c], *metrics.class_result(i)))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ # callbacks.run('on_val_end')
+
+ mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask = metrics.mean_results()
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path('../datasets/coco/annotations/instances_val2017.json')) # annotations
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ results = []
+ for eval in COCOeval(anno, pred, 'bbox'), COCOeval(anno, pred, 'segm'):
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # img ID to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ results.extend(eval.stats[:2]) # update results (mAP@0.5:0.95, mAP@0.5)
+ map_bbox, map50_bbox, map_mask, map50_mask = results
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ final_metric = mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask
+ return (*final_metric, *(loss.cpu() / len(dataloader)).tolist()), metrics.get_maps(nc), t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128-seg.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-seg.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val-seg', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ # opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.warning(f'WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results')
+ if opt.save_hybrid:
+ LOGGER.warning('WARNING ⚠️ --save-hybrid returns high mAP from hybrid labels, not from predictions alone')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = torch.cuda.is_available() and opt.device != 'cpu' # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+ else:
+ raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/setup.cfg b/setup.cfg
index 020a75740e97..d7c4cb3e1a4d 100644
--- a/setup.cfg
+++ b/setup.cfg
@@ -6,7 +6,6 @@
license_file = LICENSE
description_file = README.md
-
[tool:pytest]
norecursedirs =
.git
@@ -17,7 +16,6 @@ addopts =
--durations=25
--color=yes
-
[flake8]
max-line-length = 120
exclude = .tox,*.egg,build,temp
@@ -27,18 +25,16 @@ verbose = 2
# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
format = pylint
# see: https://www.flake8rules.com/
-ignore =
- E731 # Do not assign a lambda expression, use a def
- F405 # name may be undefined, or defined from star imports: module
- E402 # module level import not at top of file
- F401 # module imported but unused
- W504 # line break after binary operator
- E127 # continuation line over-indented for visual indent
- W504 # line break after binary operator
- E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
- E501 # line too long
- F403 # ‘from module import *’ used; unable to detect undefined names
-
+ignore = E731,F405,E402,F401,W504,E127,E231,E501,F403
+ # E731: Do not assign a lambda expression, use a def
+ # F405: name may be undefined, or defined from star imports: module
+ # E402: module level import not at top of file
+ # F401: module imported but unused
+ # W504: line break after binary operator
+ # E127: continuation line over-indented for visual indent
+ # E231: missing whitespace after ‘,’, ‘;’, or ‘:’
+ # E501: line too long
+ # F403: ‘from module import *’ used; unable to detect undefined names
[isort]
# https://pycqa.github.io/isort/docs/configuration/options.html
@@ -46,7 +42,6 @@ line_length = 120
# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
multi_line_output = 0
-
[yapf]
based_on_style = pep8
spaces_before_comment = 2
diff --git a/train.py b/train.py
index 12af2a305572..5d75f22b6335 100644
--- a/train.py
+++ b/train.py
@@ -1,15 +1,18 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
Train a YOLOv5 model on a custom dataset.
-
Models and datasets download automatically from the latest YOLOv5 release.
-Models: https://github.com/ultralytics/yolov5/tree/master/models
-Datasets: https://github.com/ultralytics/yolov5/tree/master/data
-Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
-Usage:
- $ python path/to/train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (RECOMMENDED)
- $ python path/to/train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+Usage - Single-GPU training:
+ $ python train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (recommended)
+ $ python train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 train.py --data coco128.yaml --weights yolov5s.pt --img 640 --device 0,1,2,3
+
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
"""
import argparse
@@ -36,7 +39,7 @@
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
-import val # for end-of-epoch mAP
+import val as validate # for end-of-epoch mAP
from models.experimental import attempt_load
from models.yolo import Model
from utils.autoanchor import check_anchors
@@ -44,21 +47,23 @@
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
from utils.downloads import attempt_download, is_url
-from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
- check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
- init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
- one_cycle, print_args, print_mutation, strip_optimizer)
+from utils.general import (LOGGER, TQDM_BAR_FORMAT, check_amp, check_dataset, check_file, check_git_info,
+ check_git_status, check_img_size, check_requirements, check_suffix, check_yaml, colorstr,
+ get_latest_run, increment_path, init_seeds, intersect_dicts, labels_to_class_weights,
+ labels_to_image_weights, methods, one_cycle, print_args, print_mutation, strip_optimizer,
+ yaml_save)
from utils.loggers import Loggers
-from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loggers.comet.comet_utils import check_comet_resume
from utils.loss import ComputeLoss
from utils.metrics import fitness
-from utils.plots import plot_evolve, plot_labels
+from utils.plots import plot_evolve
from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
smart_resume, torch_distributed_zero_first)
LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv('RANK', -1))
WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+GIT_INFO = check_git_info()
def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
@@ -81,26 +86,23 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
# Save run settings
if not evolve:
- with open(save_dir / 'hyp.yaml', 'w') as f:
- yaml.safe_dump(hyp, f, sort_keys=False)
- with open(save_dir / 'opt.yaml', 'w') as f:
- yaml.safe_dump(vars(opt), f, sort_keys=False)
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
# Loggers
data_dict = None
if RANK in {-1, 0}:
loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
- if loggers.clearml:
- data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
- if loggers.wandb:
- data_dict = loggers.wandb.data_dict
- if resume:
- weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
# Register actions
for k in methods(loggers):
callbacks.register_action(k, callback=getattr(loggers, k))
+ # Process custom dataset artifact link
+ data_dict = loggers.remote_dataset
+ if resume: # If resuming runs from remote artifact
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
# Config
plots = not evolve and not opt.noplots # create plots
cuda = device.type != 'cpu'
@@ -109,8 +111,7 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
data_dict = data_dict or check_dataset(data) # check if None
train_path, val_path = data_dict['train'], data_dict['val']
nc = 1 if single_cls else int(data_dict['nc']) # number of classes
- names = ['item'] if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
- assert len(names) == nc, f'{len(names)} names found for nc={nc} dataset in {data}' # check
+ names = {0: 'item'} if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
# Model
@@ -167,12 +168,13 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
# Resume
best_fitness, start_epoch = 0.0, 0
if pretrained:
- best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
del ckpt, csd
# DP mode
if cuda and RANK == -1 and torch.cuda.device_count() > 1:
- LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ LOGGER.warning('WARNING ⚠️ DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
model = torch.nn.DataParallel(model)
@@ -196,7 +198,8 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
image_weights=opt.image_weights,
quad=opt.quad,
prefix=colorstr('train: '),
- shuffle=True)
+ shuffle=True,
+ seed=opt.seed)
labels = np.concatenate(dataset.labels, 0)
mlc = int(labels[:, 0].max()) # max label class
assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
@@ -217,15 +220,11 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
prefix=colorstr('val: '))[0]
if not resume:
- if plots:
- plot_labels(labels, names, save_dir)
-
- # Anchors
if not opt.noautoanchor:
- check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz) # run AutoAnchor
model.half().float() # pre-reduce anchor precision
- callbacks.run('on_pretrain_routine_end')
+ callbacks.run('on_pretrain_routine_end', labels, names)
# DDP mode
if cuda and RANK != -1:
@@ -277,9 +276,9 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
if RANK != -1:
train_loader.sampler.set_epoch(epoch)
pbar = enumerate(train_loader)
- LOGGER.info(('\n' + '%10s' * 7) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'labels', 'img_size'))
+ LOGGER.info(('\n' + '%11s' * 7) % ('Epoch', 'GPU_mem', 'box_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
if RANK in {-1, 0}:
- pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ pbar = tqdm(pbar, total=nb, bar_format=TQDM_BAR_FORMAT) # progress bar
optimizer.zero_grad()
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
callbacks.run('on_train_batch_start')
@@ -332,9 +331,9 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
if RANK in {-1, 0}:
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
- pbar.set_description(('%10s' * 2 + '%10.4g' * 5) %
+ pbar.set_description(('%11s' * 2 + '%11.4g' * 5) %
(f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
- callbacks.run('on_train_batch_end', ni, model, imgs, targets, paths, plots)
+ callbacks.run('on_train_batch_end', model, ni, imgs, targets, paths, list(mloss))
if callbacks.stop_training:
return
# end batch ------------------------------------------------------------------------------------------------
@@ -349,17 +348,17 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
if not noval or final_epoch: # Calculate mAP
- results, maps, _ = val.run(data_dict,
- batch_size=batch_size // WORLD_SIZE * 2,
- imgsz=imgsz,
- half=amp,
- model=ema.ema,
- single_cls=single_cls,
- dataloader=val_loader,
- save_dir=save_dir,
- plots=False,
- callbacks=callbacks,
- compute_loss=compute_loss)
+ results, maps, _ = validate.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
# Update best mAP
fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
@@ -378,8 +377,8 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
'ema': deepcopy(ema.ema).half(),
'updates': ema.updates,
'optimizer': optimizer.state_dict(),
- 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
'opt': vars(opt),
+ 'git': GIT_INFO, # {remote, branch, commit} if a git repo
'date': datetime.now().isoformat()}
# Save last, best and delete
@@ -409,12 +408,12 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
strip_optimizer(f) # strip optimizers
if f is best:
LOGGER.info(f'\nValidating {f}...')
- results, _, _ = val.run(
+ results, _, _ = validate.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
model=attempt_load(f, device).half(),
- iou_thres=0.65 if is_coco else 0.60, # best pycocotools results at 0.65
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
@@ -426,7 +425,7 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
if is_coco:
callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
- callbacks.run('on_train_end', last, best, plots, epoch, results)
+ callbacks.run('on_train_end', last, best, epoch, results)
torch.cuda.empty_cache()
return results
@@ -438,7 +437,7 @@ def parse_opt(known=False):
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
- parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--epochs', type=int, default=100, help='total training epochs')
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
parser.add_argument('--rect', action='store_true', help='rectangular training')
@@ -449,7 +448,7 @@ def parse_opt(known=False):
parser.add_argument('--noplots', action='store_true', help='save no plot files')
parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
- parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='image --cache ram/disk')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
@@ -469,11 +468,11 @@ def parse_opt(known=False):
parser.add_argument('--seed', type=int, default=0, help='Global training seed')
parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
- # Weights & Biases arguments
- parser.add_argument('--entity', default=None, help='W&B: Entity')
- parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
- parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
- parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+ # Logger arguments
+ parser.add_argument('--entity', default=None, help='Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='Version of dataset artifact to use')
return parser.parse_known_args()[0] if known else parser.parse_args()
@@ -483,10 +482,10 @@ def main(opt, callbacks=Callbacks()):
if RANK in {-1, 0}:
print_args(vars(opt))
check_git_status()
- check_requirements(exclude=['thop'])
+ check_requirements()
- # Resume
- if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ # Resume (from specified or most recent last.pt)
+ if opt.resume and not check_comet_resume(opt) and not opt.evolve:
last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
opt_data = opt.data # original dataset
@@ -610,7 +609,9 @@ def main(opt, callbacks=Callbacks()):
results = train(hyp.copy(), opt, device, callbacks)
callbacks = Callbacks()
# Write mutation results
- print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss')
+ print_mutation(keys, results, hyp.copy(), save_dir, opt.bucket)
# Plot results
plot_evolve(evolve_csv)
diff --git a/tutorial.ipynb b/tutorial.ipynb
index 540754b357c5..e83617e9dce7 100644
--- a/tutorial.ipynb
+++ b/tutorial.ipynb
@@ -5,10 +5,7 @@
"colab": {
"name": "YOLOv5 Tutorial",
"provenance": [],
- "collapsed_sections": [],
- "machine_shape": "hm",
- "toc_visible": true,
- "include_colab_link": true
+ "toc_visible": true
},
"kernelspec": {
"name": "python3",
@@ -17,7 +14,7 @@
"accelerator": "GPU",
"widgets": {
"application/vnd.jupyter.widget-state+json": {
- "c31d2039ccf74c22b67841f4877d1186": {
+ "1f7df330663048998adcf8a45bc8f69b": {
"model_module": "@jupyter-widgets/controls",
"model_name": "HBoxModel",
"model_module_version": "1.5.0",
@@ -32,14 +29,14 @@
"_view_name": "HBoxView",
"box_style": "",
"children": [
- "IPY_MODEL_d4bba1727c714d94ad58a72bffa07c4c",
- "IPY_MODEL_9aeff9f1780b45f892422fdc96e56913",
- "IPY_MODEL_bf55a7c71d074d3fa88b10b997820825"
+ "IPY_MODEL_e896e6096dd244c59d7955e2035cd729",
+ "IPY_MODEL_a6ff238c29984b24bf6d0bd175c19430",
+ "IPY_MODEL_3c085ba3f3fd4c3c8a6bb41b41ce1479"
],
- "layout": "IPY_MODEL_d8b66044e2fb4f5b916696834d880c81"
+ "layout": "IPY_MODEL_16b0c8aa6e0f427e8a54d3791abb7504"
}
},
- "d4bba1727c714d94ad58a72bffa07c4c": {
+ "e896e6096dd244c59d7955e2035cd729": {
"model_module": "@jupyter-widgets/controls",
"model_name": "HTMLModel",
"model_module_version": "1.5.0",
@@ -54,13 +51,13 @@
"_view_name": "HTMLView",
"description": "",
"description_tooltip": null,
- "layout": "IPY_MODEL_102e1deda239436fa72751c58202fa0f",
+ "layout": "IPY_MODEL_c7b2dd0f78384cad8e400b282996cdf5",
"placeholder": "",
- "style": "IPY_MODEL_4fd4431ced6c42368e18424912b877e4",
+ "style": "IPY_MODEL_6a27e43b0e434edd82ee63f0a91036ca",
"value": "100%"
}
},
- "9aeff9f1780b45f892422fdc96e56913": {
+ "a6ff238c29984b24bf6d0bd175c19430": {
"model_module": "@jupyter-widgets/controls",
"model_name": "FloatProgressModel",
"model_module_version": "1.5.0",
@@ -76,15 +73,15 @@
"bar_style": "success",
"description": "",
"description_tooltip": null,
- "layout": "IPY_MODEL_cdd709c4f40941bea1b2053523c9fac8",
+ "layout": "IPY_MODEL_cce0e6c0c4ec442cb47e65c674e02e92",
"max": 818322941,
"min": 0,
"orientation": "horizontal",
- "style": "IPY_MODEL_a1ef2d8de2b741c78ca5d938e2ddbcdf",
+ "style": "IPY_MODEL_c5b9f38e2f0d4f9aa97fe87265263743",
"value": 818322941
}
},
- "bf55a7c71d074d3fa88b10b997820825": {
+ "3c085ba3f3fd4c3c8a6bb41b41ce1479": {
"model_module": "@jupyter-widgets/controls",
"model_name": "HTMLModel",
"model_module_version": "1.5.0",
@@ -99,13 +96,13 @@
"_view_name": "HTMLView",
"description": "",
"description_tooltip": null,
- "layout": "IPY_MODEL_0dbce99bb6184238842cbec0587d564a",
+ "layout": "IPY_MODEL_df554fb955c7454696beac5a82889386",
"placeholder": "",
- "style": "IPY_MODEL_91ff5f93f2a24c5790ab29e347965946",
- "value": " 780M/780M [01:10<00:00, 10.5MB/s]"
+ "style": "IPY_MODEL_74e9112a87a242f4831b7d68c7da6333",
+ "value": " 780M/780M [00:05<00:00, 126MB/s]"
}
},
- "d8b66044e2fb4f5b916696834d880c81": {
+ "16b0c8aa6e0f427e8a54d3791abb7504": {
"model_module": "@jupyter-widgets/base",
"model_name": "LayoutModel",
"model_module_version": "1.2.0",
@@ -157,7 +154,7 @@
"width": null
}
},
- "102e1deda239436fa72751c58202fa0f": {
+ "c7b2dd0f78384cad8e400b282996cdf5": {
"model_module": "@jupyter-widgets/base",
"model_name": "LayoutModel",
"model_module_version": "1.2.0",
@@ -209,7 +206,7 @@
"width": null
}
},
- "4fd4431ced6c42368e18424912b877e4": {
+ "6a27e43b0e434edd82ee63f0a91036ca": {
"model_module": "@jupyter-widgets/controls",
"model_name": "DescriptionStyleModel",
"model_module_version": "1.5.0",
@@ -224,7 +221,7 @@
"description_width": ""
}
},
- "cdd709c4f40941bea1b2053523c9fac8": {
+ "cce0e6c0c4ec442cb47e65c674e02e92": {
"model_module": "@jupyter-widgets/base",
"model_name": "LayoutModel",
"model_module_version": "1.2.0",
@@ -276,7 +273,7 @@
"width": null
}
},
- "a1ef2d8de2b741c78ca5d938e2ddbcdf": {
+ "c5b9f38e2f0d4f9aa97fe87265263743": {
"model_module": "@jupyter-widgets/controls",
"model_name": "ProgressStyleModel",
"model_module_version": "1.5.0",
@@ -292,7 +289,7 @@
"description_width": ""
}
},
- "0dbce99bb6184238842cbec0587d564a": {
+ "df554fb955c7454696beac5a82889386": {
"model_module": "@jupyter-widgets/base",
"model_name": "LayoutModel",
"model_module_version": "1.2.0",
@@ -344,7 +341,7 @@
"width": null
}
},
- "91ff5f93f2a24c5790ab29e347965946": {
+ "74e9112a87a242f4831b7d68c7da6333": {
"model_module": "@jupyter-widgets/controls",
"model_name": "DescriptionStyleModel",
"model_module_version": "1.5.0",
@@ -363,27 +360,27 @@
}
},
"cells": [
- {
- "cell_type": "markdown",
- "metadata": {
- "id": "view-in-github",
- "colab_type": "text"
- },
- "source": [
- " \n",
+ "\n",
+ "\n",
"\n",
- "This is the **official YOLOv5 🚀 notebook** by **Ultralytics**, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
- "For more information please visit https://github.com/ultralytics/yolov5 and https://ultralytics.com. Thank you!"
+ "\n",
+ "
\n",
+ "\n",
+ "\n",
"\n",
- "This is the **official YOLOv5 🚀 notebook** by **Ultralytics**, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
- "For more information please visit https://github.com/ultralytics/yolov5 and https://ultralytics.com. Thank you!"
+ "\n",
+ "

"
+ ],
+ "metadata": {
+ "id": "nWOsI5wJR1o3"
+ }
+ },
{
"cell_type": "markdown",
"source": [
@@ -946,22 +900,6 @@
"id": "Lay2WsTjNJzP"
}
},
- {
- "cell_type": "markdown",
- "metadata": {
- "id": "DLI1JmHU7B0l"
- },
- "source": [
- "## Weights & Biases Logging\n",
- "\n",
- "[Weights & Biases](https://wandb.ai/site?utm_campaign=repo_yolo_notebook) (W&B) is integrated with YOLOv5 for real-time visualization and cloud logging of training runs. This allows for better run comparison and introspection, as well improved visibility and collaboration for teams. To enable W&B `pip install wandb`, and then train normally (you will be guided through setup on first use). \n",
- "\n",
- "During training you will see live updates at [https://wandb.ai/home](https://wandb.ai/home?utm_campaign=repo_yolo_notebook), and you can create and share detailed [Reports](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY) of your results. For more information see the [YOLOv5 Weights & Biases Tutorial](https://github.com/ultralytics/yolov5/issues/1289). \n",
- "\n",
- "\n",
- " "
- ]
- },
{
"cell_type": "markdown",
"metadata": {
@@ -987,7 +925,7 @@
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
- "- **Google Colab and Kaggle** notebooks with free GPU: \n",
+ "- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart) \n"
@@ -1001,7 +939,7 @@
"source": [
"# Status\n",
"\n",
- "\n",
+ "\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
@@ -1014,124 +952,22 @@
"source": [
"# Appendix\n",
"\n",
- "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
+ "Additional content below."
]
},
- {
- "cell_type": "code",
- "metadata": {
- "id": "mcKoSIK2WSzj"
- },
- "source": [
- "# Reproduce\n",
- "for x in 'yolov5n', 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
- ],
- "execution_count": null,
- "outputs": []
- },
{
"cell_type": "code",
"metadata": {
"id": "GMusP4OAxFu6"
},
"source": [
- "# PyTorch Hub\n",
+ "# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
- "# Model\n",
- "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
- "\n",
- "# Images\n",
- "dir = 'https://ultralytics.com/images/'\n",
- "imgs = [dir + f for f in ('zidane.jpg', 'bus.jpg')] # batch of images\n",
- "\n",
- "# Inference\n",
- "results = model(imgs)\n",
- "results.print() # or .show(), .save()"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "FGH0ZjkGjejy"
- },
- "source": [
- "# YOLOv5 CI\n",
- "%%shell\n",
- "rm -rf runs # remove runs/\n",
- "m=yolov5n # official weights\n",
- "b=runs/train/exp/weights/best # best.pt checkpoint\n",
- "python train.py --imgsz 64 --batch 32 --weights $m.pt --cfg $m.yaml --epochs 1 --device 0 # train\n",
- "for d in 0 cpu; do # devices\n",
- " for w in $m $b; do # weights\n",
- " python val.py --imgsz 64 --batch 32 --weights $w.pt --device $d # val\n",
- " python detect.py --imgsz 64 --weights $w.pt --device $d # detect\n",
- " done\n",
- "done\n",
- "python hubconf.py --model $m # hub\n",
- "python models/tf.py --weights $m.pt # build TF model\n",
- "python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
- "python export.py --weights $m.pt --img 64 --include torchscript # export"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "gogI-kwi3Tye"
- },
- "source": [
- "# Profile\n",
- "from utils.torch_utils import profile\n",
- "\n",
- "m1 = lambda x: x * torch.sigmoid(x)\n",
- "m2 = torch.nn.SiLU()\n",
- "results = profile(input=torch.randn(16, 3, 640, 640), ops=[m1, m2], n=100)"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "RVRSOhEvUdb5"
- },
- "source": [
- "# Evolve\n",
- "!python train.py --img 640 --batch 64 --epochs 100 --data coco128.yaml --weights yolov5s.pt --cache --noautoanchor --evolve\n",
- "!d=runs/train/evolve && cp evolve.* $d && zip -r evolve.zip $d && gsutil mv evolve.zip gs://bucket # upload results (optional)"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "BSgFCAcMbk1R"
- },
- "source": [
- "# VOC\n",
- "for b, m in zip([64, 64, 64, 32, 16], ['yolov5n', 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x']): # batch, model\n",
- " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.VOC.yaml --project VOC --name {m} --cache"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "VTRwsvA9u7ln"
- },
- "source": [
- "# TensorRT \n",
- "!pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # install\n",
- "!python export.py --weights yolov5s.pt --include engine --imgsz 640 --device 0 # export\n",
- "!python detect.py --weights yolov5s.engine --imgsz 640 --device 0 # inference"
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s', force_reload=True) # yolov5n - yolov5x6 or custom\n",
+ "im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
+ "results = model(im) # inference\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
],
"execution_count": null,
"outputs": []
diff --git a/utils/__init__.py b/utils/__init__.py
index a63c473a4340..7bf3efe6b8c7 100644
--- a/utils/__init__.py
+++ b/utils/__init__.py
@@ -3,6 +3,49 @@
utils/initialization
"""
+import contextlib
+import platform
+import threading
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg=''):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(emojis(f"{self.msg}{': ' if self.msg else ''}{value}"))
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def join_threads(verbose=False):
+ # Join all daemon threads, i.e. atexit.register(lambda: join_threads())
+ main_thread = threading.current_thread()
+ for t in threading.enumerate():
+ if t is not main_thread:
+ if verbose:
+ print(f'Joining thread {t.name}')
+ t.join()
+
def notebook_init(verbose=True):
# Check system software and hardware
@@ -11,10 +54,11 @@ def notebook_init(verbose=True):
import os
import shutil
- from utils.general import check_requirements, emojis, is_colab
+ from utils.general import check_font, check_requirements, is_colab
from utils.torch_utils import select_device # imports
- check_requirements(('psutil', 'IPython'))
+ check_font()
+
import psutil
from IPython import display # to display images and clear console output
diff --git a/utils/augmentations.py b/utils/augmentations.py
index 3f764c06ae3b..1eae5db8f816 100644
--- a/utils/augmentations.py
+++ b/utils/augmentations.py
@@ -8,20 +8,28 @@
import cv2
import numpy as np
+import torch
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
-from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box, xywhn2xyxy
from utils.metrics import bbox_ioa
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
class Albumentations:
# YOLOv5 Albumentations class (optional, only used if package is installed)
- def __init__(self):
+ def __init__(self, size=640):
self.transform = None
+ prefix = colorstr('albumentations: ')
try:
import albumentations as A
check_version(A.__version__, '1.0.3', hard=True) # version requirement
T = [
+ A.RandomResizedCrop(height=size, width=size, scale=(0.8, 1.0), ratio=(0.9, 1.11), p=0.0),
A.Blur(p=0.01),
A.MedianBlur(p=0.01),
A.ToGray(p=0.01),
@@ -31,11 +39,11 @@ def __init__(self):
A.ImageCompression(quality_lower=75, p=0.0)] # transforms
self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
- LOGGER.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
except ImportError: # package not installed, skip
pass
except Exception as e:
- LOGGER.info(colorstr('albumentations: ') + f'{e}')
+ LOGGER.info(f'{prefix}{e}')
def __call__(self, im, labels, p=1.0):
if self.transform and random.random() < p:
@@ -44,6 +52,18 @@ def __call__(self, im, labels, p=1.0):
return im, labels
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=inplace)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
# HSV color-space augmentation
if hgain or sgain or vgain:
@@ -230,12 +250,10 @@ def copy_paste(im, labels, segments, p=0.5):
if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
labels = np.concatenate((labels, [[l[0], *box]]), 0)
segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
- cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (1, 1, 1), cv2.FILLED)
- result = cv2.bitwise_and(src1=im, src2=im_new)
- result = cv2.flip(result, 1) # augment segments (flip left-right)
- i = result > 0 # pixels to replace
- # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ result = cv2.flip(im, 1) # augment segments (flip left-right)
+ i = cv2.flip(im_new, 1).astype(bool)
im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
return im, labels, segments
@@ -262,7 +280,7 @@ def cutout(im, labels, p=0.5):
# return unobscured labels
if len(labels) and s > 0.03:
box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
- ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ ioa = bbox_ioa(box, xywhn2xyxy(labels[:, 1:5], w, h)) # intersection over area
labels = labels[ioa < 0.60] # remove >60% obscured labels
return labels
@@ -282,3 +300,98 @@ def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16):
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(
+ augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ ratio=(0.75, 1.0 / 0.75), # 0.75, 1.33
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale, ratio=ratio)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ LOGGER.warning(f'{prefix}⚠️ not found, install with `pip install albumentations` (recommended)')
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ assert isinstance(size, int), f'ERROR: classify_transforms size {size} must be integer, not (list, tuple)'
+ # T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
+ return T.Compose([CenterCrop(size), ToTensor(), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
+
+
+class LetterBox:
+ # YOLOv5 LetterBox class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
+ def __init__(self, size=(640, 640), auto=False, stride=32):
+ super().__init__()
+ self.h, self.w = (size, size) if isinstance(size, int) else size
+ self.auto = auto # pass max size integer, automatically solve for short side using stride
+ self.stride = stride # used with auto
+
+ def __call__(self, im): # im = np.array HWC
+ imh, imw = im.shape[:2]
+ r = min(self.h / imh, self.w / imw) # ratio of new/old
+ h, w = round(imh * r), round(imw * r) # resized image
+ hs, ws = (math.ceil(x / self.stride) * self.stride for x in (h, w)) if self.auto else self.h, self.w
+ top, left = round((hs - h) / 2 - 0.1), round((ws - w) / 2 - 0.1)
+ im_out = np.full((self.h, self.w, 3), 114, dtype=im.dtype)
+ im_out[top:top + h, left:left + w] = cv2.resize(im, (w, h), interpolation=cv2.INTER_LINEAR)
+ return im_out
+
+
+class CenterCrop:
+ # YOLOv5 CenterCrop class for image preprocessing, i.e. T.Compose([CenterCrop(size), ToTensor()])
+ def __init__(self, size=640):
+ super().__init__()
+ self.h, self.w = (size, size) if isinstance(size, int) else size
+
+ def __call__(self, im): # im = np.array HWC
+ imh, imw = im.shape[:2]
+ m = min(imh, imw) # min dimension
+ top, left = (imh - m) // 2, (imw - m) // 2
+ return cv2.resize(im[top:top + m, left:left + m], (self.w, self.h), interpolation=cv2.INTER_LINEAR)
+
+
+class ToTensor:
+ # YOLOv5 ToTensor class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
+ def __init__(self, half=False):
+ super().__init__()
+ self.half = half
+
+ def __call__(self, im): # im = np.array HWC in BGR order
+ im = np.ascontiguousarray(im.transpose((2, 0, 1))[::-1]) # HWC to CHW -> BGR to RGB -> contiguous
+ im = torch.from_numpy(im) # to torch
+ im = im.half() if self.half else im.float() # uint8 to fp16/32
+ im /= 255.0 # 0-255 to 0.0-1.0
+ return im
diff --git a/utils/autoanchor.py b/utils/autoanchor.py
index f2222203e24c..bb5cf6e6965e 100644
--- a/utils/autoanchor.py
+++ b/utils/autoanchor.py
@@ -10,7 +10,8 @@
import yaml
from tqdm import tqdm
-from utils.general import LOGGER, colorstr
+from utils import TryExcept
+from utils.general import LOGGER, TQDM_BAR_FORMAT, colorstr
PREFIX = colorstr('AutoAnchor: ')
@@ -25,6 +26,7 @@ def check_anchor_order(m):
m.anchors[:] = m.anchors.flip(0)
+@TryExcept(f'{PREFIX}ERROR')
def check_anchors(dataset, model, thr=4.0, imgsz=640):
# Check anchor fit to data, recompute if necessary
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
@@ -49,10 +51,7 @@ def metric(k): # compute metric
else:
LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
na = m.anchors.numel() // 2 # number of anchors
- try:
- anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
- except Exception as e:
- LOGGER.info(f'{PREFIX}ERROR: {e}')
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
new_bpr = metric(anchors)[0]
if new_bpr > bpr: # replace anchors
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
@@ -123,8 +122,8 @@ def print_results(k, verbose=True):
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
- LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
- wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ LOGGER.info(f'{PREFIX}WARNING ⚠️ Extremely small objects found: {i} of {len(wh0)} labels are <3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)].astype(np.float32) # filter > 2 pixels
# wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans init
@@ -135,7 +134,7 @@ def print_results(k, verbose=True):
k = kmeans(wh / s, n, iter=30)[0] * s # points
assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
except Exception:
- LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ LOGGER.warning(f'{PREFIX}WARNING ⚠️ switching strategies from kmeans to random init')
k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
k = print_results(k, verbose=False)
@@ -154,7 +153,7 @@ def print_results(k, verbose=True):
# Evolve
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
- pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ pbar = tqdm(range(gen), bar_format=TQDM_BAR_FORMAT) # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
@@ -167,4 +166,4 @@ def print_results(k, verbose=True):
if verbose:
print_results(k, verbose)
- return print_results(k)
+ return print_results(k).astype(np.float32)
diff --git a/utils/autobatch.py b/utils/autobatch.py
index c231d24c0706..bdeb91c3d2bd 100644
--- a/utils/autobatch.py
+++ b/utils/autobatch.py
@@ -18,8 +18,8 @@ def check_train_batch_size(model, imgsz=640, amp=True):
return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
-def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
- # Automatically estimate best batch size to use `fraction` of available CUDA memory
+def autobatch(model, imgsz=640, fraction=0.8, batch_size=16):
+ # Automatically estimate best YOLOv5 batch size to use `fraction` of available CUDA memory
# Usage:
# import torch
# from utils.autobatch import autobatch
@@ -33,6 +33,9 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
if device.type == 'cpu':
LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
return batch_size
+ if torch.backends.cudnn.benchmark:
+ LOGGER.info(f'{prefix} ⚠️ Requires torch.backends.cudnn.benchmark=False, using default batch-size {batch_size}')
+ return batch_size
# Inspect CUDA memory
gb = 1 << 30 # bytes to GiB (1024 ** 3)
@@ -47,7 +50,7 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
# Profile batch sizes
batch_sizes = [1, 2, 4, 8, 16]
try:
- img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
+ img = [torch.empty(b, 3, imgsz, imgsz) for b in batch_sizes]
results = profile(img, model, n=3, device=device)
except Exception as e:
LOGGER.warning(f'{prefix}{e}')
@@ -60,7 +63,10 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
i = results.index(None) # first fail index
if b >= batch_sizes[i]: # y intercept above failure point
b = batch_sizes[max(i - 1, 0)] # select prior safe point
+ if b < 1 or b > 1024: # b outside of safe range
+ b = batch_size
+ LOGGER.warning(f'{prefix}WARNING ⚠️ CUDA anomaly detected, recommend restart environment and retry command.')
- fraction = np.polyval(p, b) / t # actual fraction predicted
+ fraction = (np.polyval(p, b) + r + a) / t # actual fraction predicted
LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅')
return b
diff --git a/utils/callbacks.py b/utils/callbacks.py
index 2b32df0bf1c1..166d8938322d 100644
--- a/utils/callbacks.py
+++ b/utils/callbacks.py
@@ -3,6 +3,8 @@
Callback utils
"""
+import threading
+
class Callbacks:
""""
@@ -55,17 +57,20 @@ def get_registered_actions(self, hook=None):
"""
return self._callbacks[hook] if hook else self._callbacks
- def run(self, hook, *args, **kwargs):
+ def run(self, hook, *args, thread=False, **kwargs):
"""
- Loop through the registered actions and fire all callbacks
+ Loop through the registered actions and fire all callbacks on main thread
Args:
hook: The name of the hook to check, defaults to all
args: Arguments to receive from YOLOv5
+ thread: (boolean) Run callbacks in daemon thread
kwargs: Keyword Arguments to receive from YOLOv5
"""
assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
-
for logger in self._callbacks[hook]:
- logger['callback'](*args, **kwargs)
+ if thread:
+ threading.Thread(target=logger['callback'], args=args, kwargs=kwargs, daemon=True).start()
+ else:
+ logger['callback'](*args, **kwargs)
diff --git a/utils/dataloaders.py b/utils/dataloaders.py
old mode 100755
new mode 100644
index 00f6413df7ad..cbb3114e94d8
--- a/utils/dataloaders.py
+++ b/utils/dataloaders.py
@@ -17,27 +17,31 @@
from pathlib import Path
from threading import Thread
from urllib.parse import urlparse
-from zipfile import ZipFile
import numpy as np
+import psutil
import torch
import torch.nn.functional as F
+import torchvision
import yaml
from PIL import ExifTags, Image, ImageOps
from torch.utils.data import DataLoader, Dataset, dataloader, distributed
from tqdm import tqdm
-from utils.augmentations import Albumentations, augment_hsv, copy_paste, letterbox, mixup, random_perspective
-from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
- cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, TQDM_BAR_FORMAT, check_dataset, check_requirements,
+ check_yaml, clean_str, cv2, is_colab, is_kaggle, segments2boxes, unzip_file, xyn2xy,
+ xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
from utils.torch_utils import torch_distributed_zero_first
# Parameters
-HELP_URL = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
-IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+HELP_URL = 'See https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp', 'pfm' # include image suffixes
VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
-BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+PIN_MEMORY = str(os.getenv('PIN_MEMORY', True)).lower() == 'true' # global pin_memory for dataloaders
# Get orientation exif tag
for orientation in ExifTags.TAGS.keys():
@@ -81,7 +85,7 @@ def exif_transpose(image):
5: Image.TRANSPOSE,
6: Image.ROTATE_270,
7: Image.TRANSVERSE,
- 8: Image.ROTATE_90,}.get(orientation)
+ 8: Image.ROTATE_90}.get(orientation)
if method is not None:
image = image.transpose(method)
del exif[0x0112]
@@ -111,9 +115,10 @@ def create_dataloader(path,
image_weights=False,
quad=False,
prefix='',
- shuffle=False):
+ shuffle=False,
+ seed=0):
if rect and shuffle:
- LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
shuffle = False
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = LoadImagesAndLabels(
@@ -136,13 +141,13 @@ def create_dataloader(path,
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
- generator.manual_seed(0)
+ generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
- pin_memory=True,
+ pin_memory=PIN_MEMORY,
collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
worker_init_fn=seed_worker,
generator=generator), dataset
@@ -182,9 +187,60 @@ def __iter__(self):
yield from iter(self.sampler)
+class LoadScreenshots:
+ # YOLOv5 screenshot dataloader, i.e. `python detect.py --source "screen 0 100 100 512 256"`
+ def __init__(self, source, img_size=640, stride=32, auto=True, transforms=None):
+ # source = [screen_number left top width height] (pixels)
+ check_requirements('mss')
+ import mss
+
+ source, *params = source.split()
+ self.screen, left, top, width, height = 0, None, None, None, None # default to full screen 0
+ if len(params) == 1:
+ self.screen = int(params[0])
+ elif len(params) == 4:
+ left, top, width, height = (int(x) for x in params)
+ elif len(params) == 5:
+ self.screen, left, top, width, height = (int(x) for x in params)
+ self.img_size = img_size
+ self.stride = stride
+ self.transforms = transforms
+ self.auto = auto
+ self.mode = 'stream'
+ self.frame = 0
+ self.sct = mss.mss()
+
+ # Parse monitor shape
+ monitor = self.sct.monitors[self.screen]
+ self.top = monitor["top"] if top is None else (monitor["top"] + top)
+ self.left = monitor["left"] if left is None else (monitor["left"] + left)
+ self.width = width or monitor["width"]
+ self.height = height or monitor["height"]
+ self.monitor = {"left": self.left, "top": self.top, "width": self.width, "height": self.height}
+
+ def __iter__(self):
+ return self
+
+ def __next__(self):
+ # mss screen capture: get raw pixels from the screen as np array
+ im0 = np.array(self.sct.grab(self.monitor))[:, :, :3] # [:, :, :3] BGRA to BGR
+ s = f"screen {self.screen} (LTWH): {self.left},{self.top},{self.width},{self.height}: "
+
+ if self.transforms:
+ im = self.transforms(im0) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+ self.frame += 1
+ return str(self.screen), im, im0, None, s # screen, img, original img, im0s, s
+
+
class LoadImages:
# YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
- def __init__(self, path, img_size=640, stride=32, auto=True):
+ def __init__(self, path, img_size=640, stride=32, auto=True, transforms=None, vid_stride=1):
+ if isinstance(path, str) and Path(path).suffix == ".txt": # *.txt file with img/vid/dir on each line
+ path = Path(path).read_text().rsplit()
files = []
for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
p = str(Path(p).resolve())
@@ -208,8 +264,10 @@ def __init__(self, path, img_size=640, stride=32, auto=True):
self.video_flag = [False] * ni + [True] * nv
self.mode = 'image'
self.auto = auto
+ self.transforms = transforms # optional
+ self.vid_stride = vid_stride # video frame-rate stride
if any(videos):
- self.new_video(videos[0]) # new video
+ self._new_video(videos[0]) # new video
else:
self.cap = None
assert self.nf > 0, f'No images or videos found in {p}. ' \
@@ -227,107 +285,77 @@ def __next__(self):
if self.video_flag[self.count]:
# Read video
self.mode = 'video'
- ret_val, img0 = self.cap.read()
+ for _ in range(self.vid_stride):
+ self.cap.grab()
+ ret_val, im0 = self.cap.retrieve()
while not ret_val:
self.count += 1
self.cap.release()
if self.count == self.nf: # last video
raise StopIteration
path = self.files[self.count]
- self.new_video(path)
- ret_val, img0 = self.cap.read()
+ self._new_video(path)
+ ret_val, im0 = self.cap.read()
self.frame += 1
+ # im0 = self._cv2_rotate(im0) # for use if cv2 autorotation is False
s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
else:
# Read image
self.count += 1
- img0 = cv2.imread(path) # BGR
- assert img0 is not None, f'Image Not Found {path}'
+ im0 = cv2.imread(path) # BGR
+ assert im0 is not None, f'Image Not Found {path}'
s = f'image {self.count}/{self.nf} {path}: '
- # Padded resize
- img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
-
- # Convert
- img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
- img = np.ascontiguousarray(img)
+ if self.transforms:
+ im = self.transforms(im0) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
- return path, img, img0, self.cap, s
+ return path, im, im0, self.cap, s
- def new_video(self, path):
+ def _new_video(self, path):
+ # Create a new video capture object
self.frame = 0
self.cap = cv2.VideoCapture(path)
- self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT) / self.vid_stride)
+ self.orientation = int(self.cap.get(cv2.CAP_PROP_ORIENTATION_META)) # rotation degrees
+ # self.cap.set(cv2.CAP_PROP_ORIENTATION_AUTO, 0) # disable https://github.com/ultralytics/yolov5/issues/8493
+
+ def _cv2_rotate(self, im):
+ # Rotate a cv2 video manually
+ if self.orientation == 0:
+ return cv2.rotate(im, cv2.ROTATE_90_CLOCKWISE)
+ elif self.orientation == 180:
+ return cv2.rotate(im, cv2.ROTATE_90_COUNTERCLOCKWISE)
+ elif self.orientation == 90:
+ return cv2.rotate(im, cv2.ROTATE_180)
+ return im
def __len__(self):
return self.nf # number of files
-class LoadWebcam: # for inference
- # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
- def __init__(self, pipe='0', img_size=640, stride=32):
- self.img_size = img_size
- self.stride = stride
- self.pipe = eval(pipe) if pipe.isnumeric() else pipe
- self.cap = cv2.VideoCapture(self.pipe) # video capture object
- self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
-
- def __iter__(self):
- self.count = -1
- return self
-
- def __next__(self):
- self.count += 1
- if cv2.waitKey(1) == ord('q'): # q to quit
- self.cap.release()
- cv2.destroyAllWindows()
- raise StopIteration
-
- # Read frame
- ret_val, img0 = self.cap.read()
- img0 = cv2.flip(img0, 1) # flip left-right
-
- # Print
- assert ret_val, f'Camera Error {self.pipe}'
- img_path = 'webcam.jpg'
- s = f'webcam {self.count}: '
-
- # Padded resize
- img = letterbox(img0, self.img_size, stride=self.stride)[0]
-
- # Convert
- img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
- img = np.ascontiguousarray(img)
-
- return img_path, img, img0, None, s
-
- def __len__(self):
- return 0
-
-
class LoadStreams:
# YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
- def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ def __init__(self, sources='file.streams', img_size=640, stride=32, auto=True, transforms=None, vid_stride=1):
+ torch.backends.cudnn.benchmark = True # faster for fixed-size inference
self.mode = 'stream'
self.img_size = img_size
self.stride = stride
-
- if os.path.isfile(sources):
- with open(sources) as f:
- sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
- else:
- sources = [sources]
-
+ self.vid_stride = vid_stride # video frame-rate stride
+ sources = Path(sources).read_text().rsplit() if os.path.isfile(sources) else [sources]
n = len(sources)
- self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
self.sources = [clean_str(x) for x in sources] # clean source names for later
- self.auto = auto
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
for i, s in enumerate(sources): # index, source
# Start thread to read frames from video stream
st = f'{i + 1}/{n}: {s}... '
if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ # YouTube format i.e. 'https://www.youtube.com/watch?v=Zgi9g1ksQHc' or 'https://youtu.be/Zgi9g1ksQHc'
check_requirements(('pafy', 'youtube_dl==2020.12.2'))
import pafy
s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
@@ -350,24 +378,25 @@ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
LOGGER.info('') # newline
# check for common shapes
- s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ s = np.stack([letterbox(x, img_size, stride=stride, auto=auto)[0].shape for x in self.imgs])
self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ self.auto = auto and self.rect
+ self.transforms = transforms # optional
if not self.rect:
- LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+ LOGGER.warning('WARNING ⚠️ Stream shapes differ. For optimal performance supply similarly-shaped streams.')
def update(self, i, cap, stream):
# Read stream `i` frames in daemon thread
- n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ n, f = 0, self.frames[i] # frame number, frame array
while cap.isOpened() and n < f:
n += 1
- # _, self.imgs[index] = cap.read()
- cap.grab()
- if n % read == 0:
+ cap.grab() # .read() = .grab() followed by .retrieve()
+ if n % self.vid_stride == 0:
success, im = cap.retrieve()
if success:
self.imgs[i] = im
else:
- LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ LOGGER.warning('WARNING ⚠️ Video stream unresponsive, please check your IP camera connection.')
self.imgs[i] = np.zeros_like(self.imgs[i])
cap.open(stream) # re-open stream if signal was lost
time.sleep(0.0) # wait time
@@ -382,18 +411,15 @@ def __next__(self):
cv2.destroyAllWindows()
raise StopIteration
- # Letterbox
- img0 = self.imgs.copy()
- img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
-
- # Stack
- img = np.stack(img, 0)
-
- # Convert
- img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
- img = np.ascontiguousarray(img)
+ im0 = self.imgs.copy()
+ if self.transforms:
+ im = np.stack([self.transforms(x) for x in im0]) # transforms
+ else:
+ im = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0] for x in im0]) # resize
+ im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ im = np.ascontiguousarray(im) # contiguous
- return self.sources, img, img0, None, ''
+ return self.sources, im, im0, None, ''
def __len__(self):
return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
@@ -422,6 +448,7 @@ def __init__(self,
single_cls=False,
stride=32,
pad=0.0,
+ min_items=0,
prefix=''):
self.img_size = img_size
self.augment = augment
@@ -432,7 +459,7 @@ def __init__(self,
self.mosaic_border = [-img_size // 2, -img_size // 2]
self.stride = stride
self.path = path
- self.albumentations = Albumentations() if augment else None
+ self.albumentations = Albumentations(size=img_size) if augment else None
try:
f = [] # image files
@@ -445,15 +472,15 @@ def __init__(self,
with open(p) as t:
t = t.read().strip().splitlines()
parent = str(p.parent) + os.sep
- f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
- # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ f += [x.replace('./', parent, 1) if x.startswith('./') else x for x in t] # to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # to global path (pathlib)
else:
raise FileNotFoundError(f'{prefix}{p} does not exist')
self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
# self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
assert self.im_files, f'{prefix}No images found'
except Exception as e:
- raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\n{HELP_URL}') from e
# Check cache
self.label_files = img2label_paths(self.im_files) # labels
@@ -468,21 +495,35 @@ def __init__(self,
# Display cache
nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
if exists and LOCAL_RANK in {-1, 0}:
- d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
- tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ d = f"Scanning {cache_path}... {nf} images, {nm + ne} backgrounds, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=TQDM_BAR_FORMAT) # display cache results
if cache['msgs']:
LOGGER.info('\n'.join(cache['msgs'])) # display warnings
- assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+ assert nf > 0 or not augment, f'{prefix}No labels found in {cache_path}, can not start training. {HELP_URL}'
# Read cache
[cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
labels, shapes, self.segments = zip(*cache.values())
+ nl = len(np.concatenate(labels, 0)) # number of labels
+ assert nl > 0 or not augment, f'{prefix}All labels empty in {cache_path}, can not start training. {HELP_URL}'
self.labels = list(labels)
self.shapes = np.array(shapes)
self.im_files = list(cache.keys()) # update
self.label_files = img2label_paths(cache.keys()) # update
- n = len(shapes) # number of images
- bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+
+ # Filter images
+ if min_items:
+ include = np.array([len(x) >= min_items for x in self.labels]).nonzero()[0].astype(int)
+ LOGGER.info(f'{prefix}{n - len(include)}/{n} images filtered from dataset')
+ self.im_files = [self.im_files[i] for i in include]
+ self.label_files = [self.label_files[i] for i in include]
+ self.labels = [self.labels[i] for i in include]
+ self.segments = [self.segments[i] for i in include]
+ self.shapes = self.shapes[include] # wh
+
+ # Create indices
+ n = len(self.shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(int) # batch index
nb = bi[-1] + 1 # number of batches
self.batch = bi # batch index of image
self.n = n
@@ -499,8 +540,6 @@ def __init__(self,
self.segments[i] = segment[j]
if single_cls: # single-class training, merge all classes into 0
self.labels[i][:, 0] = 0
- if segment:
- self.segments[i][:, 0] = 0
# Rectangular Training
if self.rect:
@@ -511,6 +550,7 @@ def __init__(self,
self.im_files = [self.im_files[i] for i in irect]
self.label_files = [self.label_files[i] for i in irect]
self.labels = [self.labels[i] for i in irect]
+ self.segments = [self.segments[i] for i in irect]
self.shapes = s[irect] # wh
ar = ar[irect]
@@ -524,36 +564,55 @@ def __init__(self,
elif mini > 1:
shapes[i] = [1, 1 / mini]
- self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(int) * stride
- # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ # Cache images into RAM/disk for faster training
+ if cache_images == 'ram' and not self.check_cache_ram(prefix=prefix):
+ cache_images = False
self.ims = [None] * n
self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
if cache_images:
- gb = 0 # Gigabytes of cached images
+ b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
self.im_hw0, self.im_hw = [None] * n, [None] * n
fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
- pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ pbar = tqdm(enumerate(results), total=n, bar_format=TQDM_BAR_FORMAT, disable=LOCAL_RANK > 0)
for i, x in pbar:
if cache_images == 'disk':
- gb += self.npy_files[i].stat().st_size
+ b += self.npy_files[i].stat().st_size
else: # 'ram'
self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
- gb += self.ims[i].nbytes
- pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ b += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({b / gb:.1f}GB {cache_images})'
pbar.close()
+ def check_cache_ram(self, safety_margin=0.1, prefix=''):
+ # Check image caching requirements vs available memory
+ b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
+ n = min(self.n, 30) # extrapolate from 30 random images
+ for _ in range(n):
+ im = cv2.imread(random.choice(self.im_files)) # sample image
+ ratio = self.img_size / max(im.shape[0], im.shape[1]) # max(h, w) # ratio
+ b += im.nbytes * ratio ** 2
+ mem_required = b * self.n / n # GB required to cache dataset into RAM
+ mem = psutil.virtual_memory()
+ cache = mem_required * (1 + safety_margin) < mem.available # to cache or not to cache, that is the question
+ if not cache:
+ LOGGER.info(f"{prefix}{mem_required / gb:.1f}GB RAM required, "
+ f"{mem.available / gb:.1f}/{mem.total / gb:.1f}GB available, "
+ f"{'caching images ✅' if cache else 'not caching images ⚠️'}")
+ return cache
+
def cache_labels(self, path=Path('./labels.cache'), prefix=''):
# Cache dataset labels, check images and read shapes
x = {} # dict
nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
- desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ desc = f"{prefix}Scanning {path.parent / path.stem}..."
with Pool(NUM_THREADS) as pool:
pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
desc=desc,
total=len(self.im_files),
- bar_format=BAR_FORMAT)
+ bar_format=TQDM_BAR_FORMAT)
for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
nm += nm_f
nf += nf_f
@@ -563,13 +622,13 @@ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
x[im_file] = [lb, shape, segments]
if msg:
msgs.append(msg)
- pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ pbar.desc = f"{desc} {nf} images, {nm + ne} backgrounds, {nc} corrupt"
pbar.close()
if msgs:
LOGGER.info('\n'.join(msgs))
if nf == 0:
- LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ LOGGER.warning(f'{prefix}WARNING ⚠️ No labels found in {path}. {HELP_URL}')
x['hash'] = get_hash(self.label_files + self.im_files)
x['results'] = nf, nm, ne, nc, len(self.im_files)
x['msgs'] = msgs # warnings
@@ -579,7 +638,7 @@ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
LOGGER.info(f'{prefix}New cache created: {path}')
except Exception as e:
- LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ LOGGER.warning(f'{prefix}WARNING ⚠️ Cache directory {path.parent} is not writeable: {e}') # not writeable
return x
def __len__(self):
@@ -678,7 +737,7 @@ def load_image(self, i):
r = self.img_size / max(h0, w0) # ratio
if r != 1: # if sizes are not equal
interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
- im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ im = cv2.resize(im, (math.ceil(w0 * r), math.ceil(h0 * r)), interpolation=interp)
return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
@@ -810,6 +869,7 @@ def load_mosaic9(self, index):
# img9, labels9 = replicate(img9, labels9) # replicate
# Augment
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, p=self.hyp['copy_paste'])
img9, labels9 = random_perspective(img9,
labels9,
segments9,
@@ -831,7 +891,7 @@ def collate_fn(batch):
@staticmethod
def collate_fn4(batch):
- img, label, path, shapes = zip(*batch) # transposed
+ im, label, path, shapes = zip(*batch) # transposed
n = len(shapes) // 4
im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
@@ -841,13 +901,13 @@ def collate_fn4(batch):
for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
i *= 4
if random.random() < 0.5:
- im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
- align_corners=False)[0].type(img[i].type())
+ im1 = F.interpolate(im[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(im[i].type())
lb = label[i]
else:
- im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ im1 = torch.cat((torch.cat((im[i], im[i + 1]), 1), torch.cat((im[i + 2], im[i + 3]), 1)), 2)
lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
- im4.append(im)
+ im4.append(im1)
label4.append(lb)
for i, lb in enumerate(label4):
@@ -870,7 +930,7 @@ def flatten_recursive(path=DATASETS_DIR / 'coco128'):
def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
# Convert detection dataset into classification dataset, with one directory per class
path = Path(path) # images dir
- shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ shutil.rmtree(path / 'classification') if (path / 'classification').is_dir() else None # remove existing
files = list(path.rglob('*.*'))
n = len(files) # number of files
for im_file in tqdm(files, total=n):
@@ -894,7 +954,7 @@ def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders impo
b = x[1:] * [w, h, w, h] # box
# b[2:] = b[2:].max() # rectangle to square
b[2:] = b[2:] * 1.2 + 3 # pad
- b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(int)
b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
@@ -916,7 +976,9 @@ def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), ann
indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
- [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+ for x in txt:
+ if (path.parent / x).exists():
+ (path.parent / x).unlink() # remove existing
print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
for i, img in tqdm(zip(indices, files), total=n):
@@ -941,7 +1003,7 @@ def verify_image_label(args):
f.seek(-2, 2)
if f.read() != b'\xff\xd9': # corrupt JPEG
ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
- msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+ msg = f'{prefix}WARNING ⚠️ {im_file}: corrupt JPEG restored and saved'
# verify labels
if os.path.isfile(lb_file):
@@ -962,8 +1024,8 @@ def verify_image_label(args):
if len(i) < nl: # duplicate row check
lb = lb[i] # remove duplicates
if segments:
- segments = segments[i]
- msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING ⚠️ {im_file}: {nl - len(i)} duplicate labels removed'
else:
ne = 1 # label empty
lb = np.zeros((0, 5), dtype=np.float32)
@@ -973,18 +1035,23 @@ def verify_image_label(args):
return im_file, lb, shape, segments, nm, nf, ne, nc, msg
except Exception as e:
nc = 1
- msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ msg = f'{prefix}WARNING ⚠️ {im_file}: ignoring corrupt image/label: {e}'
return [None, None, None, None, nm, nf, ne, nc, msg]
class HUBDatasetStats():
- """ Return dataset statistics dictionary with images and instances counts per split per class
- To run in parent directory: export PYTHONPATH="$PWD/yolov5"
- Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
- Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ """ Class for generating HUB dataset JSON and `-hub` dataset directory
+
Arguments
path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
autodownload: Attempt to download dataset if not found locally
+
+ Usage
+ from utils.dataloaders import HUBDatasetStats
+ stats = HUBDatasetStats('coco128.yaml', autodownload=True) # usage 1
+ stats = HUBDatasetStats('path/to/coco128.zip') # usage 2
+ stats.get_json(save=False)
+ stats.process_images()
"""
def __init__(self, path='coco128.yaml', autodownload=False):
@@ -1002,7 +1069,7 @@ def __init__(self, path='coco128.yaml', autodownload=False):
self.hub_dir = Path(data['path'] + '-hub')
self.im_dir = self.hub_dir / 'images'
self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
- self.stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ self.stats = {'nc': data['nc'], 'names': list(data['names'].values())} # statistics dictionary
self.data = data
@staticmethod
@@ -1021,7 +1088,7 @@ def _unzip(self, path):
if not str(path).endswith('.zip'): # path is data.yaml
return False, None, path
assert Path(path).is_file(), f'Error unzipping {path}, file not found'
- ZipFile(path).extractall(path=path.parent) # unzip
+ unzip_file(path, path=path.parent)
dir = path.with_suffix('') # dataset directory == zip name
assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
@@ -1036,7 +1103,7 @@ def _hub_ops(self, f, max_dim=1920):
im = im.resize((int(im.width * r), int(im.height * r)))
im.save(f_new, 'JPEG', quality=50, optimize=True) # save
except Exception as e: # use OpenCV
- print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ LOGGER.info(f'WARNING ⚠️ HUB ops PIL failure {f}: {e}')
im = cv2.imread(f)
im_height, im_width = im.shape[:2]
r = max_dim / max(im_height, im_width) # ratio
@@ -1090,3 +1157,65 @@ def process_images(self):
pass
print(f'Done. All images saved to {self.im_dir}')
return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ if self.album_transforms:
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(im)
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + RANK)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=PIN_MEMORY,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/utils/docker/Dockerfile b/utils/docker/Dockerfile
index 2280f209e6a1..e0d4411118f0 100644
--- a/utils/docker/Dockerfile
+++ b/utils/docker/Dockerfile
@@ -3,7 +3,7 @@
# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
-FROM nvcr.io/nvidia/pytorch:22.07-py3
+FROM nvcr.io/nvidia/pytorch:22.12-py3
RUN rm -rf /opt/pytorch # remove 1.2GB dir
# Downloads to user config dir
@@ -16,7 +16,7 @@ RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-
COPY requirements.txt .
RUN python -m pip install --upgrade pip wheel
RUN pip uninstall -y Pillow torchtext # torch torchvision
-RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+RUN pip install --no-cache -r requirements.txt ultralytics albumentations comet gsutil notebook Pillow>=9.1.0 \
'opencv-python<4.6.0.66' \
--extra-index-url https://download.pytorch.org/whl/cu113
@@ -29,7 +29,7 @@ WORKDIR /usr/src/app
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
# Set environment variables
-ENV OMP_NUM_THREADS=8
+ENV OMP_NUM_THREADS=1
# Usage Examples -------------------------------------------------------------------------------------------------------
@@ -49,11 +49,8 @@ ENV OMP_NUM_THREADS=8
# Kill all image-based
# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
-# Bash into running container
-# sudo docker exec -it 5a9b5863d93d bash
-
-# Bash into stopped container
-# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+# DockerHub tag update
+# t=ultralytics/yolov5:latest tnew=ultralytics/yolov5:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew
# Clean up
# docker system prune -a --volumes
diff --git a/utils/docker/Dockerfile-arm64 b/utils/docker/Dockerfile-arm64
index fe92c8d56146..eed1410793a1 100644
--- a/utils/docker/Dockerfile-arm64
+++ b/utils/docker/Dockerfile-arm64
@@ -9,16 +9,16 @@ FROM arm64v8/ubuntu:20.04
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
+ENV DEBIAN_FRONTEND noninteractive
RUN apt update
-RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
-RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
- libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+RUN TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc libgl1-mesa-glx libglib2.0-0 libpython3-dev
# RUN alias python=python3
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
-RUN pip install --no-cache -r requirements.txt gsutil notebook \
+RUN pip install --no-cache -r requirements.txt ultralytics gsutil notebook \
tensorflow-aarch64
# tensorflowjs \
# onnx onnx-simplifier onnxruntime \
@@ -31,12 +31,13 @@ WORKDIR /usr/src/app
# Copy contents
# COPY . /usr/src/app (issues as not a .git directory)
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
# Build and Push
-# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+# t=ultralytics/yolov5:latest-arm64 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
# Pull and Run
-# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
+# t=ultralytics/yolov5:latest-arm64 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/utils/docker/Dockerfile-cpu b/utils/docker/Dockerfile-cpu
index d61dfeffe22c..558f81f00584 100644
--- a/utils/docker/Dockerfile-cpu
+++ b/utils/docker/Dockerfile-cpu
@@ -9,16 +9,18 @@ FROM ubuntu:20.04
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
+ENV DEBIAN_FRONTEND noninteractive
RUN apt update
-RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
-RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+RUN TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3-dev gnupg
# RUN alias python=python3
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
-RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
- coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu tensorflowjs \
+RUN pip install --no-cache -r requirements.txt ultralytics albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime tensorflow-cpu tensorflowjs \
+ # openvino-dev \
--extra-index-url https://download.pytorch.org/whl/cpu
# Create working directory
@@ -28,6 +30,7 @@ WORKDIR /usr/src/app
# Copy contents
# COPY . /usr/src/app (issues as not a .git directory)
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
diff --git a/utils/downloads.py b/utils/downloads.py
index 9d4780ad28b1..72ea87340eb9 100644
--- a/utils/downloads.py
+++ b/utils/downloads.py
@@ -5,24 +5,21 @@
import logging
import os
-import platform
import subprocess
-import time
import urllib
from pathlib import Path
-from zipfile import ZipFile
import requests
import torch
-def is_url(url, check_online=True):
- # Check if online file exists
+def is_url(url, check=True):
+ # Check if string is URL and check if URL exists
try:
url = str(url)
result = urllib.parse.urlparse(url)
- assert all([result.scheme, result.netloc, result.path]) # check if is url
- return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ assert all([result.scheme, result.netloc]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check else True # check if exists online
except (AssertionError, urllib.request.HTTPError):
return False
@@ -33,6 +30,12 @@ def gsutil_getsize(url=''):
return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+def url_getsize(url='https://ultralytics.com/images/bus.jpg'):
+ # Return downloadable file size in bytes
+ response = requests.head(url, allow_redirects=True)
+ return int(response.headers.get('content-length', -1))
+
+
def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
# Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
from utils.general import LOGGER
@@ -44,24 +47,26 @@ def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
except Exception as e: # url2
- file.unlink(missing_ok=True) # remove partial downloads
+ if file.exists():
+ file.unlink() # remove partial downloads
LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
- os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ os.system(f"curl -# -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
finally:
if not file.exists() or file.stat().st_size < min_bytes: # check
- file.unlink(missing_ok=True) # remove partial downloads
+ if file.exists():
+ file.unlink() # remove partial downloads
LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
LOGGER.info('')
-def attempt_download(file, repo='ultralytics/yolov5', release='v6.1'):
- # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.1', etc.
+def attempt_download(file, repo='ultralytics/yolov5', release='v7.0'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v7.0', etc.
from utils.general import LOGGER
def github_assets(repository, version='latest'):
- # Return GitHub repo tag (i.e. 'v6.1') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ # Return GitHub repo tag (i.e. 'v7.0') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
if version != 'latest':
- version = f'tags/{version}' # i.e. tags/v6.1
+ version = f'tags/{version}' # i.e. tags/v7.0
response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
@@ -79,9 +84,7 @@ def github_assets(repository, version='latest'):
return file
# GitHub assets
- assets = [
- 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
- 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ assets = [f'yolov5{size}{suffix}.pt' for size in 'nsmlx' for suffix in ('', '6', '-cls', '-seg')] # default
try:
tag, assets = github_assets(repo, release)
except Exception:
@@ -99,82 +102,7 @@ def github_assets(repository, version='latest'):
safe_download(
file,
url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
- url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
min_bytes=1E5,
error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
return str(file)
-
-
-def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
- # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
- t = time.time()
- file = Path(file)
- cookie = Path('cookie') # gdrive cookie
- print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
- file.unlink(missing_ok=True) # remove existing file
- cookie.unlink(missing_ok=True) # remove existing cookie
-
- # Attempt file download
- out = "NUL" if platform.system() == "Windows" else "/dev/null"
- os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
- if os.path.exists('cookie'): # large file
- s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
- else: # small file
- s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
- r = os.system(s) # execute, capture return
- cookie.unlink(missing_ok=True) # remove existing cookie
-
- # Error check
- if r != 0:
- file.unlink(missing_ok=True) # remove partial
- print('Download error ') # raise Exception('Download error')
- return r
-
- # Unzip if archive
- if file.suffix == '.zip':
- print('unzipping... ', end='')
- ZipFile(file).extractall(path=file.parent) # unzip
- file.unlink() # remove zip
-
- print(f'Done ({time.time() - t:.1f}s)')
- return r
-
-
-def get_token(cookie="./cookie"):
- with open(cookie) as f:
- for line in f:
- if "download" in line:
- return line.split()[-1]
- return ""
-
-
-# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
-#
-#
-# def upload_blob(bucket_name, source_file_name, destination_blob_name):
-# # Uploads a file to a bucket
-# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
-#
-# storage_client = storage.Client()
-# bucket = storage_client.get_bucket(bucket_name)
-# blob = bucket.blob(destination_blob_name)
-#
-# blob.upload_from_filename(source_file_name)
-#
-# print('File {} uploaded to {}.'.format(
-# source_file_name,
-# destination_blob_name))
-#
-#
-# def download_blob(bucket_name, source_blob_name, destination_file_name):
-# # Uploads a blob from a bucket
-# storage_client = storage.Client()
-# bucket = storage_client.get_bucket(bucket_name)
-# blob = bucket.blob(source_blob_name)
-#
-# blob.download_to_filename(destination_file_name)
-#
-# print('Blob {} downloaded to {}.'.format(
-# source_blob_name,
-# destination_file_name))
diff --git a/utils/flask_rest_api/restapi.py b/utils/flask_rest_api/restapi.py
index 08036dd64490..8482435c861e 100644
--- a/utils/flask_rest_api/restapi.py
+++ b/utils/flask_rest_api/restapi.py
@@ -1,6 +1,6 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Run a Flask REST API exposing a YOLOv5s model
+Run a Flask REST API exposing one or more YOLOv5s models
"""
import argparse
@@ -11,12 +11,13 @@
from PIL import Image
app = Flask(__name__)
+models = {}
-DETECTION_URL = "/v1/object-detection/yolov5s"
+DETECTION_URL = "/v1/object-detection/
"
- ]
- },
{
"cell_type": "markdown",
"metadata": {
@@ -987,7 +925,7 @@
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
- "- **Google Colab and Kaggle** notebooks with free GPU: \n",
+ "- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart) \n"
@@ -1001,7 +939,7 @@
"source": [
"# Status\n",
"\n",
- "\n",
+ "\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
@@ -1014,124 +952,22 @@
"source": [
"# Appendix\n",
"\n",
- "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
+ "Additional content below."
]
},
- {
- "cell_type": "code",
- "metadata": {
- "id": "mcKoSIK2WSzj"
- },
- "source": [
- "# Reproduce\n",
- "for x in 'yolov5n', 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
- ],
- "execution_count": null,
- "outputs": []
- },
{
"cell_type": "code",
"metadata": {
"id": "GMusP4OAxFu6"
},
"source": [
- "# PyTorch Hub\n",
+ "# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
- "# Model\n",
- "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
- "\n",
- "# Images\n",
- "dir = 'https://ultralytics.com/images/'\n",
- "imgs = [dir + f for f in ('zidane.jpg', 'bus.jpg')] # batch of images\n",
- "\n",
- "# Inference\n",
- "results = model(imgs)\n",
- "results.print() # or .show(), .save()"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "FGH0ZjkGjejy"
- },
- "source": [
- "# YOLOv5 CI\n",
- "%%shell\n",
- "rm -rf runs # remove runs/\n",
- "m=yolov5n # official weights\n",
- "b=runs/train/exp/weights/best # best.pt checkpoint\n",
- "python train.py --imgsz 64 --batch 32 --weights $m.pt --cfg $m.yaml --epochs 1 --device 0 # train\n",
- "for d in 0 cpu; do # devices\n",
- " for w in $m $b; do # weights\n",
- " python val.py --imgsz 64 --batch 32 --weights $w.pt --device $d # val\n",
- " python detect.py --imgsz 64 --weights $w.pt --device $d # detect\n",
- " done\n",
- "done\n",
- "python hubconf.py --model $m # hub\n",
- "python models/tf.py --weights $m.pt # build TF model\n",
- "python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
- "python export.py --weights $m.pt --img 64 --include torchscript # export"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "gogI-kwi3Tye"
- },
- "source": [
- "# Profile\n",
- "from utils.torch_utils import profile\n",
- "\n",
- "m1 = lambda x: x * torch.sigmoid(x)\n",
- "m2 = torch.nn.SiLU()\n",
- "results = profile(input=torch.randn(16, 3, 640, 640), ops=[m1, m2], n=100)"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "RVRSOhEvUdb5"
- },
- "source": [
- "# Evolve\n",
- "!python train.py --img 640 --batch 64 --epochs 100 --data coco128.yaml --weights yolov5s.pt --cache --noautoanchor --evolve\n",
- "!d=runs/train/evolve && cp evolve.* $d && zip -r evolve.zip $d && gsutil mv evolve.zip gs://bucket # upload results (optional)"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "BSgFCAcMbk1R"
- },
- "source": [
- "# VOC\n",
- "for b, m in zip([64, 64, 64, 32, 16], ['yolov5n', 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x']): # batch, model\n",
- " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.VOC.yaml --project VOC --name {m} --cache"
- ],
- "execution_count": null,
- "outputs": []
- },
- {
- "cell_type": "code",
- "metadata": {
- "id": "VTRwsvA9u7ln"
- },
- "source": [
- "# TensorRT \n",
- "!pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # install\n",
- "!python export.py --weights yolov5s.pt --include engine --imgsz 640 --device 0 # export\n",
- "!python detect.py --weights yolov5s.engine --imgsz 640 --device 0 # inference"
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s', force_reload=True) # yolov5n - yolov5x6 or custom\n",
+ "im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
+ "results = model(im) # inference\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
],
"execution_count": null,
"outputs": []
diff --git a/utils/__init__.py b/utils/__init__.py
index a63c473a4340..7bf3efe6b8c7 100644
--- a/utils/__init__.py
+++ b/utils/__init__.py
@@ -3,6 +3,49 @@
utils/initialization
"""
+import contextlib
+import platform
+import threading
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg=''):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(emojis(f"{self.msg}{': ' if self.msg else ''}{value}"))
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def join_threads(verbose=False):
+ # Join all daemon threads, i.e. atexit.register(lambda: join_threads())
+ main_thread = threading.current_thread()
+ for t in threading.enumerate():
+ if t is not main_thread:
+ if verbose:
+ print(f'Joining thread {t.name}')
+ t.join()
+
def notebook_init(verbose=True):
# Check system software and hardware
@@ -11,10 +54,11 @@ def notebook_init(verbose=True):
import os
import shutil
- from utils.general import check_requirements, emojis, is_colab
+ from utils.general import check_font, check_requirements, is_colab
from utils.torch_utils import select_device # imports
- check_requirements(('psutil', 'IPython'))
+ check_font()
+
import psutil
from IPython import display # to display images and clear console output
diff --git a/utils/augmentations.py b/utils/augmentations.py
index 3f764c06ae3b..1eae5db8f816 100644
--- a/utils/augmentations.py
+++ b/utils/augmentations.py
@@ -8,20 +8,28 @@
import cv2
import numpy as np
+import torch
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
-from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box, xywhn2xyxy
from utils.metrics import bbox_ioa
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
class Albumentations:
# YOLOv5 Albumentations class (optional, only used if package is installed)
- def __init__(self):
+ def __init__(self, size=640):
self.transform = None
+ prefix = colorstr('albumentations: ')
try:
import albumentations as A
check_version(A.__version__, '1.0.3', hard=True) # version requirement
T = [
+ A.RandomResizedCrop(height=size, width=size, scale=(0.8, 1.0), ratio=(0.9, 1.11), p=0.0),
A.Blur(p=0.01),
A.MedianBlur(p=0.01),
A.ToGray(p=0.01),
@@ -31,11 +39,11 @@ def __init__(self):
A.ImageCompression(quality_lower=75, p=0.0)] # transforms
self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
- LOGGER.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
except ImportError: # package not installed, skip
pass
except Exception as e:
- LOGGER.info(colorstr('albumentations: ') + f'{e}')
+ LOGGER.info(f'{prefix}{e}')
def __call__(self, im, labels, p=1.0):
if self.transform and random.random() < p:
@@ -44,6 +52,18 @@ def __call__(self, im, labels, p=1.0):
return im, labels
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=inplace)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
# HSV color-space augmentation
if hgain or sgain or vgain:
@@ -230,12 +250,10 @@ def copy_paste(im, labels, segments, p=0.5):
if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
labels = np.concatenate((labels, [[l[0], *box]]), 0)
segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
- cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (1, 1, 1), cv2.FILLED)
- result = cv2.bitwise_and(src1=im, src2=im_new)
- result = cv2.flip(result, 1) # augment segments (flip left-right)
- i = result > 0 # pixels to replace
- # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ result = cv2.flip(im, 1) # augment segments (flip left-right)
+ i = cv2.flip(im_new, 1).astype(bool)
im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
return im, labels, segments
@@ -262,7 +280,7 @@ def cutout(im, labels, p=0.5):
# return unobscured labels
if len(labels) and s > 0.03:
box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
- ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ ioa = bbox_ioa(box, xywhn2xyxy(labels[:, 1:5], w, h)) # intersection over area
labels = labels[ioa < 0.60] # remove >60% obscured labels
return labels
@@ -282,3 +300,98 @@ def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16):
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(
+ augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ ratio=(0.75, 1.0 / 0.75), # 0.75, 1.33
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale, ratio=ratio)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ LOGGER.warning(f'{prefix}⚠️ not found, install with `pip install albumentations` (recommended)')
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ assert isinstance(size, int), f'ERROR: classify_transforms size {size} must be integer, not (list, tuple)'
+ # T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
+ return T.Compose([CenterCrop(size), ToTensor(), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
+
+
+class LetterBox:
+ # YOLOv5 LetterBox class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
+ def __init__(self, size=(640, 640), auto=False, stride=32):
+ super().__init__()
+ self.h, self.w = (size, size) if isinstance(size, int) else size
+ self.auto = auto # pass max size integer, automatically solve for short side using stride
+ self.stride = stride # used with auto
+
+ def __call__(self, im): # im = np.array HWC
+ imh, imw = im.shape[:2]
+ r = min(self.h / imh, self.w / imw) # ratio of new/old
+ h, w = round(imh * r), round(imw * r) # resized image
+ hs, ws = (math.ceil(x / self.stride) * self.stride for x in (h, w)) if self.auto else self.h, self.w
+ top, left = round((hs - h) / 2 - 0.1), round((ws - w) / 2 - 0.1)
+ im_out = np.full((self.h, self.w, 3), 114, dtype=im.dtype)
+ im_out[top:top + h, left:left + w] = cv2.resize(im, (w, h), interpolation=cv2.INTER_LINEAR)
+ return im_out
+
+
+class CenterCrop:
+ # YOLOv5 CenterCrop class for image preprocessing, i.e. T.Compose([CenterCrop(size), ToTensor()])
+ def __init__(self, size=640):
+ super().__init__()
+ self.h, self.w = (size, size) if isinstance(size, int) else size
+
+ def __call__(self, im): # im = np.array HWC
+ imh, imw = im.shape[:2]
+ m = min(imh, imw) # min dimension
+ top, left = (imh - m) // 2, (imw - m) // 2
+ return cv2.resize(im[top:top + m, left:left + m], (self.w, self.h), interpolation=cv2.INTER_LINEAR)
+
+
+class ToTensor:
+ # YOLOv5 ToTensor class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
+ def __init__(self, half=False):
+ super().__init__()
+ self.half = half
+
+ def __call__(self, im): # im = np.array HWC in BGR order
+ im = np.ascontiguousarray(im.transpose((2, 0, 1))[::-1]) # HWC to CHW -> BGR to RGB -> contiguous
+ im = torch.from_numpy(im) # to torch
+ im = im.half() if self.half else im.float() # uint8 to fp16/32
+ im /= 255.0 # 0-255 to 0.0-1.0
+ return im
diff --git a/utils/autoanchor.py b/utils/autoanchor.py
index f2222203e24c..bb5cf6e6965e 100644
--- a/utils/autoanchor.py
+++ b/utils/autoanchor.py
@@ -10,7 +10,8 @@
import yaml
from tqdm import tqdm
-from utils.general import LOGGER, colorstr
+from utils import TryExcept
+from utils.general import LOGGER, TQDM_BAR_FORMAT, colorstr
PREFIX = colorstr('AutoAnchor: ')
@@ -25,6 +26,7 @@ def check_anchor_order(m):
m.anchors[:] = m.anchors.flip(0)
+@TryExcept(f'{PREFIX}ERROR')
def check_anchors(dataset, model, thr=4.0, imgsz=640):
# Check anchor fit to data, recompute if necessary
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
@@ -49,10 +51,7 @@ def metric(k): # compute metric
else:
LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
na = m.anchors.numel() // 2 # number of anchors
- try:
- anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
- except Exception as e:
- LOGGER.info(f'{PREFIX}ERROR: {e}')
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
new_bpr = metric(anchors)[0]
if new_bpr > bpr: # replace anchors
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
@@ -123,8 +122,8 @@ def print_results(k, verbose=True):
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
- LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
- wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ LOGGER.info(f'{PREFIX}WARNING ⚠️ Extremely small objects found: {i} of {len(wh0)} labels are <3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)].astype(np.float32) # filter > 2 pixels
# wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans init
@@ -135,7 +134,7 @@ def print_results(k, verbose=True):
k = kmeans(wh / s, n, iter=30)[0] * s # points
assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
except Exception:
- LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ LOGGER.warning(f'{PREFIX}WARNING ⚠️ switching strategies from kmeans to random init')
k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
k = print_results(k, verbose=False)
@@ -154,7 +153,7 @@ def print_results(k, verbose=True):
# Evolve
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
- pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ pbar = tqdm(range(gen), bar_format=TQDM_BAR_FORMAT) # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
@@ -167,4 +166,4 @@ def print_results(k, verbose=True):
if verbose:
print_results(k, verbose)
- return print_results(k)
+ return print_results(k).astype(np.float32)
diff --git a/utils/autobatch.py b/utils/autobatch.py
index c231d24c0706..bdeb91c3d2bd 100644
--- a/utils/autobatch.py
+++ b/utils/autobatch.py
@@ -18,8 +18,8 @@ def check_train_batch_size(model, imgsz=640, amp=True):
return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
-def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
- # Automatically estimate best batch size to use `fraction` of available CUDA memory
+def autobatch(model, imgsz=640, fraction=0.8, batch_size=16):
+ # Automatically estimate best YOLOv5 batch size to use `fraction` of available CUDA memory
# Usage:
# import torch
# from utils.autobatch import autobatch
@@ -33,6 +33,9 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
if device.type == 'cpu':
LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
return batch_size
+ if torch.backends.cudnn.benchmark:
+ LOGGER.info(f'{prefix} ⚠️ Requires torch.backends.cudnn.benchmark=False, using default batch-size {batch_size}')
+ return batch_size
# Inspect CUDA memory
gb = 1 << 30 # bytes to GiB (1024 ** 3)
@@ -47,7 +50,7 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
# Profile batch sizes
batch_sizes = [1, 2, 4, 8, 16]
try:
- img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
+ img = [torch.empty(b, 3, imgsz, imgsz) for b in batch_sizes]
results = profile(img, model, n=3, device=device)
except Exception as e:
LOGGER.warning(f'{prefix}{e}')
@@ -60,7 +63,10 @@ def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
i = results.index(None) # first fail index
if b >= batch_sizes[i]: # y intercept above failure point
b = batch_sizes[max(i - 1, 0)] # select prior safe point
+ if b < 1 or b > 1024: # b outside of safe range
+ b = batch_size
+ LOGGER.warning(f'{prefix}WARNING ⚠️ CUDA anomaly detected, recommend restart environment and retry command.')
- fraction = np.polyval(p, b) / t # actual fraction predicted
+ fraction = (np.polyval(p, b) + r + a) / t # actual fraction predicted
LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅')
return b
diff --git a/utils/callbacks.py b/utils/callbacks.py
index 2b32df0bf1c1..166d8938322d 100644
--- a/utils/callbacks.py
+++ b/utils/callbacks.py
@@ -3,6 +3,8 @@
Callback utils
"""
+import threading
+
class Callbacks:
""""
@@ -55,17 +57,20 @@ def get_registered_actions(self, hook=None):
"""
return self._callbacks[hook] if hook else self._callbacks
- def run(self, hook, *args, **kwargs):
+ def run(self, hook, *args, thread=False, **kwargs):
"""
- Loop through the registered actions and fire all callbacks
+ Loop through the registered actions and fire all callbacks on main thread
Args:
hook: The name of the hook to check, defaults to all
args: Arguments to receive from YOLOv5
+ thread: (boolean) Run callbacks in daemon thread
kwargs: Keyword Arguments to receive from YOLOv5
"""
assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
-
for logger in self._callbacks[hook]:
- logger['callback'](*args, **kwargs)
+ if thread:
+ threading.Thread(target=logger['callback'], args=args, kwargs=kwargs, daemon=True).start()
+ else:
+ logger['callback'](*args, **kwargs)
diff --git a/utils/dataloaders.py b/utils/dataloaders.py
old mode 100755
new mode 100644
index 00f6413df7ad..cbb3114e94d8
--- a/utils/dataloaders.py
+++ b/utils/dataloaders.py
@@ -17,27 +17,31 @@
from pathlib import Path
from threading import Thread
from urllib.parse import urlparse
-from zipfile import ZipFile
import numpy as np
+import psutil
import torch
import torch.nn.functional as F
+import torchvision
import yaml
from PIL import ExifTags, Image, ImageOps
from torch.utils.data import DataLoader, Dataset, dataloader, distributed
from tqdm import tqdm
-from utils.augmentations import Albumentations, augment_hsv, copy_paste, letterbox, mixup, random_perspective
-from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
- cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, TQDM_BAR_FORMAT, check_dataset, check_requirements,
+ check_yaml, clean_str, cv2, is_colab, is_kaggle, segments2boxes, unzip_file, xyn2xy,
+ xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
from utils.torch_utils import torch_distributed_zero_first
# Parameters
-HELP_URL = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
-IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+HELP_URL = 'See https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp', 'pfm' # include image suffixes
VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
-BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+PIN_MEMORY = str(os.getenv('PIN_MEMORY', True)).lower() == 'true' # global pin_memory for dataloaders
# Get orientation exif tag
for orientation in ExifTags.TAGS.keys():
@@ -81,7 +85,7 @@ def exif_transpose(image):
5: Image.TRANSPOSE,
6: Image.ROTATE_270,
7: Image.TRANSVERSE,
- 8: Image.ROTATE_90,}.get(orientation)
+ 8: Image.ROTATE_90}.get(orientation)
if method is not None:
image = image.transpose(method)
del exif[0x0112]
@@ -111,9 +115,10 @@ def create_dataloader(path,
image_weights=False,
quad=False,
prefix='',
- shuffle=False):
+ shuffle=False,
+ seed=0):
if rect and shuffle:
- LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
shuffle = False
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = LoadImagesAndLabels(
@@ -136,13 +141,13 @@ def create_dataloader(path,
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
- generator.manual_seed(0)
+ generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
- pin_memory=True,
+ pin_memory=PIN_MEMORY,
collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
worker_init_fn=seed_worker,
generator=generator), dataset
@@ -182,9 +187,60 @@ def __iter__(self):
yield from iter(self.sampler)
+class LoadScreenshots:
+ # YOLOv5 screenshot dataloader, i.e. `python detect.py --source "screen 0 100 100 512 256"`
+ def __init__(self, source, img_size=640, stride=32, auto=True, transforms=None):
+ # source = [screen_number left top width height] (pixels)
+ check_requirements('mss')
+ import mss
+
+ source, *params = source.split()
+ self.screen, left, top, width, height = 0, None, None, None, None # default to full screen 0
+ if len(params) == 1:
+ self.screen = int(params[0])
+ elif len(params) == 4:
+ left, top, width, height = (int(x) for x in params)
+ elif len(params) == 5:
+ self.screen, left, top, width, height = (int(x) for x in params)
+ self.img_size = img_size
+ self.stride = stride
+ self.transforms = transforms
+ self.auto = auto
+ self.mode = 'stream'
+ self.frame = 0
+ self.sct = mss.mss()
+
+ # Parse monitor shape
+ monitor = self.sct.monitors[self.screen]
+ self.top = monitor["top"] if top is None else (monitor["top"] + top)
+ self.left = monitor["left"] if left is None else (monitor["left"] + left)
+ self.width = width or monitor["width"]
+ self.height = height or monitor["height"]
+ self.monitor = {"left": self.left, "top": self.top, "width": self.width, "height": self.height}
+
+ def __iter__(self):
+ return self
+
+ def __next__(self):
+ # mss screen capture: get raw pixels from the screen as np array
+ im0 = np.array(self.sct.grab(self.monitor))[:, :, :3] # [:, :, :3] BGRA to BGR
+ s = f"screen {self.screen} (LTWH): {self.left},{self.top},{self.width},{self.height}: "
+
+ if self.transforms:
+ im = self.transforms(im0) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+ self.frame += 1
+ return str(self.screen), im, im0, None, s # screen, img, original img, im0s, s
+
+
class LoadImages:
# YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
- def __init__(self, path, img_size=640, stride=32, auto=True):
+ def __init__(self, path, img_size=640, stride=32, auto=True, transforms=None, vid_stride=1):
+ if isinstance(path, str) and Path(path).suffix == ".txt": # *.txt file with img/vid/dir on each line
+ path = Path(path).read_text().rsplit()
files = []
for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
p = str(Path(p).resolve())
@@ -208,8 +264,10 @@ def __init__(self, path, img_size=640, stride=32, auto=True):
self.video_flag = [False] * ni + [True] * nv
self.mode = 'image'
self.auto = auto
+ self.transforms = transforms # optional
+ self.vid_stride = vid_stride # video frame-rate stride
if any(videos):
- self.new_video(videos[0]) # new video
+ self._new_video(videos[0]) # new video
else:
self.cap = None
assert self.nf > 0, f'No images or videos found in {p}. ' \
@@ -227,107 +285,77 @@ def __next__(self):
if self.video_flag[self.count]:
# Read video
self.mode = 'video'
- ret_val, img0 = self.cap.read()
+ for _ in range(self.vid_stride):
+ self.cap.grab()
+ ret_val, im0 = self.cap.retrieve()
while not ret_val:
self.count += 1
self.cap.release()
if self.count == self.nf: # last video
raise StopIteration
path = self.files[self.count]
- self.new_video(path)
- ret_val, img0 = self.cap.read()
+ self._new_video(path)
+ ret_val, im0 = self.cap.read()
self.frame += 1
+ # im0 = self._cv2_rotate(im0) # for use if cv2 autorotation is False
s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
else:
# Read image
self.count += 1
- img0 = cv2.imread(path) # BGR
- assert img0 is not None, f'Image Not Found {path}'
+ im0 = cv2.imread(path) # BGR
+ assert im0 is not None, f'Image Not Found {path}'
s = f'image {self.count}/{self.nf} {path}: '
- # Padded resize
- img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
-
- # Convert
- img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
- img = np.ascontiguousarray(img)
+ if self.transforms:
+ im = self.transforms(im0) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
- return path, img, img0, self.cap, s
+ return path, im, im0, self.cap, s
- def new_video(self, path):
+ def _new_video(self, path):
+ # Create a new video capture object
self.frame = 0
self.cap = cv2.VideoCapture(path)
- self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT) / self.vid_stride)
+ self.orientation = int(self.cap.get(cv2.CAP_PROP_ORIENTATION_META)) # rotation degrees
+ # self.cap.set(cv2.CAP_PROP_ORIENTATION_AUTO, 0) # disable https://github.com/ultralytics/yolov5/issues/8493
+
+ def _cv2_rotate(self, im):
+ # Rotate a cv2 video manually
+ if self.orientation == 0:
+ return cv2.rotate(im, cv2.ROTATE_90_CLOCKWISE)
+ elif self.orientation == 180:
+ return cv2.rotate(im, cv2.ROTATE_90_COUNTERCLOCKWISE)
+ elif self.orientation == 90:
+ return cv2.rotate(im, cv2.ROTATE_180)
+ return im
def __len__(self):
return self.nf # number of files
-class LoadWebcam: # for inference
- # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
- def __init__(self, pipe='0', img_size=640, stride=32):
- self.img_size = img_size
- self.stride = stride
- self.pipe = eval(pipe) if pipe.isnumeric() else pipe
- self.cap = cv2.VideoCapture(self.pipe) # video capture object
- self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
-
- def __iter__(self):
- self.count = -1
- return self
-
- def __next__(self):
- self.count += 1
- if cv2.waitKey(1) == ord('q'): # q to quit
- self.cap.release()
- cv2.destroyAllWindows()
- raise StopIteration
-
- # Read frame
- ret_val, img0 = self.cap.read()
- img0 = cv2.flip(img0, 1) # flip left-right
-
- # Print
- assert ret_val, f'Camera Error {self.pipe}'
- img_path = 'webcam.jpg'
- s = f'webcam {self.count}: '
-
- # Padded resize
- img = letterbox(img0, self.img_size, stride=self.stride)[0]
-
- # Convert
- img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
- img = np.ascontiguousarray(img)
-
- return img_path, img, img0, None, s
-
- def __len__(self):
- return 0
-
-
class LoadStreams:
# YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
- def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ def __init__(self, sources='file.streams', img_size=640, stride=32, auto=True, transforms=None, vid_stride=1):
+ torch.backends.cudnn.benchmark = True # faster for fixed-size inference
self.mode = 'stream'
self.img_size = img_size
self.stride = stride
-
- if os.path.isfile(sources):
- with open(sources) as f:
- sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
- else:
- sources = [sources]
-
+ self.vid_stride = vid_stride # video frame-rate stride
+ sources = Path(sources).read_text().rsplit() if os.path.isfile(sources) else [sources]
n = len(sources)
- self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
self.sources = [clean_str(x) for x in sources] # clean source names for later
- self.auto = auto
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
for i, s in enumerate(sources): # index, source
# Start thread to read frames from video stream
st = f'{i + 1}/{n}: {s}... '
if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ # YouTube format i.e. 'https://www.youtube.com/watch?v=Zgi9g1ksQHc' or 'https://youtu.be/Zgi9g1ksQHc'
check_requirements(('pafy', 'youtube_dl==2020.12.2'))
import pafy
s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
@@ -350,24 +378,25 @@ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
LOGGER.info('') # newline
# check for common shapes
- s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ s = np.stack([letterbox(x, img_size, stride=stride, auto=auto)[0].shape for x in self.imgs])
self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ self.auto = auto and self.rect
+ self.transforms = transforms # optional
if not self.rect:
- LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+ LOGGER.warning('WARNING ⚠️ Stream shapes differ. For optimal performance supply similarly-shaped streams.')
def update(self, i, cap, stream):
# Read stream `i` frames in daemon thread
- n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ n, f = 0, self.frames[i] # frame number, frame array
while cap.isOpened() and n < f:
n += 1
- # _, self.imgs[index] = cap.read()
- cap.grab()
- if n % read == 0:
+ cap.grab() # .read() = .grab() followed by .retrieve()
+ if n % self.vid_stride == 0:
success, im = cap.retrieve()
if success:
self.imgs[i] = im
else:
- LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ LOGGER.warning('WARNING ⚠️ Video stream unresponsive, please check your IP camera connection.')
self.imgs[i] = np.zeros_like(self.imgs[i])
cap.open(stream) # re-open stream if signal was lost
time.sleep(0.0) # wait time
@@ -382,18 +411,15 @@ def __next__(self):
cv2.destroyAllWindows()
raise StopIteration
- # Letterbox
- img0 = self.imgs.copy()
- img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
-
- # Stack
- img = np.stack(img, 0)
-
- # Convert
- img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
- img = np.ascontiguousarray(img)
+ im0 = self.imgs.copy()
+ if self.transforms:
+ im = np.stack([self.transforms(x) for x in im0]) # transforms
+ else:
+ im = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0] for x in im0]) # resize
+ im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ im = np.ascontiguousarray(im) # contiguous
- return self.sources, img, img0, None, ''
+ return self.sources, im, im0, None, ''
def __len__(self):
return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
@@ -422,6 +448,7 @@ def __init__(self,
single_cls=False,
stride=32,
pad=0.0,
+ min_items=0,
prefix=''):
self.img_size = img_size
self.augment = augment
@@ -432,7 +459,7 @@ def __init__(self,
self.mosaic_border = [-img_size // 2, -img_size // 2]
self.stride = stride
self.path = path
- self.albumentations = Albumentations() if augment else None
+ self.albumentations = Albumentations(size=img_size) if augment else None
try:
f = [] # image files
@@ -445,15 +472,15 @@ def __init__(self,
with open(p) as t:
t = t.read().strip().splitlines()
parent = str(p.parent) + os.sep
- f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
- # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ f += [x.replace('./', parent, 1) if x.startswith('./') else x for x in t] # to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # to global path (pathlib)
else:
raise FileNotFoundError(f'{prefix}{p} does not exist')
self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
# self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
assert self.im_files, f'{prefix}No images found'
except Exception as e:
- raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\n{HELP_URL}') from e
# Check cache
self.label_files = img2label_paths(self.im_files) # labels
@@ -468,21 +495,35 @@ def __init__(self,
# Display cache
nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
if exists and LOCAL_RANK in {-1, 0}:
- d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
- tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ d = f"Scanning {cache_path}... {nf} images, {nm + ne} backgrounds, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=TQDM_BAR_FORMAT) # display cache results
if cache['msgs']:
LOGGER.info('\n'.join(cache['msgs'])) # display warnings
- assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+ assert nf > 0 or not augment, f'{prefix}No labels found in {cache_path}, can not start training. {HELP_URL}'
# Read cache
[cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
labels, shapes, self.segments = zip(*cache.values())
+ nl = len(np.concatenate(labels, 0)) # number of labels
+ assert nl > 0 or not augment, f'{prefix}All labels empty in {cache_path}, can not start training. {HELP_URL}'
self.labels = list(labels)
self.shapes = np.array(shapes)
self.im_files = list(cache.keys()) # update
self.label_files = img2label_paths(cache.keys()) # update
- n = len(shapes) # number of images
- bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+
+ # Filter images
+ if min_items:
+ include = np.array([len(x) >= min_items for x in self.labels]).nonzero()[0].astype(int)
+ LOGGER.info(f'{prefix}{n - len(include)}/{n} images filtered from dataset')
+ self.im_files = [self.im_files[i] for i in include]
+ self.label_files = [self.label_files[i] for i in include]
+ self.labels = [self.labels[i] for i in include]
+ self.segments = [self.segments[i] for i in include]
+ self.shapes = self.shapes[include] # wh
+
+ # Create indices
+ n = len(self.shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(int) # batch index
nb = bi[-1] + 1 # number of batches
self.batch = bi # batch index of image
self.n = n
@@ -499,8 +540,6 @@ def __init__(self,
self.segments[i] = segment[j]
if single_cls: # single-class training, merge all classes into 0
self.labels[i][:, 0] = 0
- if segment:
- self.segments[i][:, 0] = 0
# Rectangular Training
if self.rect:
@@ -511,6 +550,7 @@ def __init__(self,
self.im_files = [self.im_files[i] for i in irect]
self.label_files = [self.label_files[i] for i in irect]
self.labels = [self.labels[i] for i in irect]
+ self.segments = [self.segments[i] for i in irect]
self.shapes = s[irect] # wh
ar = ar[irect]
@@ -524,36 +564,55 @@ def __init__(self,
elif mini > 1:
shapes[i] = [1, 1 / mini]
- self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(int) * stride
- # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ # Cache images into RAM/disk for faster training
+ if cache_images == 'ram' and not self.check_cache_ram(prefix=prefix):
+ cache_images = False
self.ims = [None] * n
self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
if cache_images:
- gb = 0 # Gigabytes of cached images
+ b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
self.im_hw0, self.im_hw = [None] * n, [None] * n
fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
- pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ pbar = tqdm(enumerate(results), total=n, bar_format=TQDM_BAR_FORMAT, disable=LOCAL_RANK > 0)
for i, x in pbar:
if cache_images == 'disk':
- gb += self.npy_files[i].stat().st_size
+ b += self.npy_files[i].stat().st_size
else: # 'ram'
self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
- gb += self.ims[i].nbytes
- pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ b += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({b / gb:.1f}GB {cache_images})'
pbar.close()
+ def check_cache_ram(self, safety_margin=0.1, prefix=''):
+ # Check image caching requirements vs available memory
+ b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
+ n = min(self.n, 30) # extrapolate from 30 random images
+ for _ in range(n):
+ im = cv2.imread(random.choice(self.im_files)) # sample image
+ ratio = self.img_size / max(im.shape[0], im.shape[1]) # max(h, w) # ratio
+ b += im.nbytes * ratio ** 2
+ mem_required = b * self.n / n # GB required to cache dataset into RAM
+ mem = psutil.virtual_memory()
+ cache = mem_required * (1 + safety_margin) < mem.available # to cache or not to cache, that is the question
+ if not cache:
+ LOGGER.info(f"{prefix}{mem_required / gb:.1f}GB RAM required, "
+ f"{mem.available / gb:.1f}/{mem.total / gb:.1f}GB available, "
+ f"{'caching images ✅' if cache else 'not caching images ⚠️'}")
+ return cache
+
def cache_labels(self, path=Path('./labels.cache'), prefix=''):
# Cache dataset labels, check images and read shapes
x = {} # dict
nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
- desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ desc = f"{prefix}Scanning {path.parent / path.stem}..."
with Pool(NUM_THREADS) as pool:
pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
desc=desc,
total=len(self.im_files),
- bar_format=BAR_FORMAT)
+ bar_format=TQDM_BAR_FORMAT)
for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
nm += nm_f
nf += nf_f
@@ -563,13 +622,13 @@ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
x[im_file] = [lb, shape, segments]
if msg:
msgs.append(msg)
- pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ pbar.desc = f"{desc} {nf} images, {nm + ne} backgrounds, {nc} corrupt"
pbar.close()
if msgs:
LOGGER.info('\n'.join(msgs))
if nf == 0:
- LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ LOGGER.warning(f'{prefix}WARNING ⚠️ No labels found in {path}. {HELP_URL}')
x['hash'] = get_hash(self.label_files + self.im_files)
x['results'] = nf, nm, ne, nc, len(self.im_files)
x['msgs'] = msgs # warnings
@@ -579,7 +638,7 @@ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
LOGGER.info(f'{prefix}New cache created: {path}')
except Exception as e:
- LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ LOGGER.warning(f'{prefix}WARNING ⚠️ Cache directory {path.parent} is not writeable: {e}') # not writeable
return x
def __len__(self):
@@ -678,7 +737,7 @@ def load_image(self, i):
r = self.img_size / max(h0, w0) # ratio
if r != 1: # if sizes are not equal
interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
- im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ im = cv2.resize(im, (math.ceil(w0 * r), math.ceil(h0 * r)), interpolation=interp)
return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
@@ -810,6 +869,7 @@ def load_mosaic9(self, index):
# img9, labels9 = replicate(img9, labels9) # replicate
# Augment
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, p=self.hyp['copy_paste'])
img9, labels9 = random_perspective(img9,
labels9,
segments9,
@@ -831,7 +891,7 @@ def collate_fn(batch):
@staticmethod
def collate_fn4(batch):
- img, label, path, shapes = zip(*batch) # transposed
+ im, label, path, shapes = zip(*batch) # transposed
n = len(shapes) // 4
im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
@@ -841,13 +901,13 @@ def collate_fn4(batch):
for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
i *= 4
if random.random() < 0.5:
- im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
- align_corners=False)[0].type(img[i].type())
+ im1 = F.interpolate(im[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(im[i].type())
lb = label[i]
else:
- im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ im1 = torch.cat((torch.cat((im[i], im[i + 1]), 1), torch.cat((im[i + 2], im[i + 3]), 1)), 2)
lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
- im4.append(im)
+ im4.append(im1)
label4.append(lb)
for i, lb in enumerate(label4):
@@ -870,7 +930,7 @@ def flatten_recursive(path=DATASETS_DIR / 'coco128'):
def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
# Convert detection dataset into classification dataset, with one directory per class
path = Path(path) # images dir
- shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ shutil.rmtree(path / 'classification') if (path / 'classification').is_dir() else None # remove existing
files = list(path.rglob('*.*'))
n = len(files) # number of files
for im_file in tqdm(files, total=n):
@@ -894,7 +954,7 @@ def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders impo
b = x[1:] * [w, h, w, h] # box
# b[2:] = b[2:].max() # rectangle to square
b[2:] = b[2:] * 1.2 + 3 # pad
- b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(int)
b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
@@ -916,7 +976,9 @@ def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), ann
indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
- [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+ for x in txt:
+ if (path.parent / x).exists():
+ (path.parent / x).unlink() # remove existing
print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
for i, img in tqdm(zip(indices, files), total=n):
@@ -941,7 +1003,7 @@ def verify_image_label(args):
f.seek(-2, 2)
if f.read() != b'\xff\xd9': # corrupt JPEG
ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
- msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+ msg = f'{prefix}WARNING ⚠️ {im_file}: corrupt JPEG restored and saved'
# verify labels
if os.path.isfile(lb_file):
@@ -962,8 +1024,8 @@ def verify_image_label(args):
if len(i) < nl: # duplicate row check
lb = lb[i] # remove duplicates
if segments:
- segments = segments[i]
- msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING ⚠️ {im_file}: {nl - len(i)} duplicate labels removed'
else:
ne = 1 # label empty
lb = np.zeros((0, 5), dtype=np.float32)
@@ -973,18 +1035,23 @@ def verify_image_label(args):
return im_file, lb, shape, segments, nm, nf, ne, nc, msg
except Exception as e:
nc = 1
- msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ msg = f'{prefix}WARNING ⚠️ {im_file}: ignoring corrupt image/label: {e}'
return [None, None, None, None, nm, nf, ne, nc, msg]
class HUBDatasetStats():
- """ Return dataset statistics dictionary with images and instances counts per split per class
- To run in parent directory: export PYTHONPATH="$PWD/yolov5"
- Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
- Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ """ Class for generating HUB dataset JSON and `-hub` dataset directory
+
Arguments
path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
autodownload: Attempt to download dataset if not found locally
+
+ Usage
+ from utils.dataloaders import HUBDatasetStats
+ stats = HUBDatasetStats('coco128.yaml', autodownload=True) # usage 1
+ stats = HUBDatasetStats('path/to/coco128.zip') # usage 2
+ stats.get_json(save=False)
+ stats.process_images()
"""
def __init__(self, path='coco128.yaml', autodownload=False):
@@ -1002,7 +1069,7 @@ def __init__(self, path='coco128.yaml', autodownload=False):
self.hub_dir = Path(data['path'] + '-hub')
self.im_dir = self.hub_dir / 'images'
self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
- self.stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ self.stats = {'nc': data['nc'], 'names': list(data['names'].values())} # statistics dictionary
self.data = data
@staticmethod
@@ -1021,7 +1088,7 @@ def _unzip(self, path):
if not str(path).endswith('.zip'): # path is data.yaml
return False, None, path
assert Path(path).is_file(), f'Error unzipping {path}, file not found'
- ZipFile(path).extractall(path=path.parent) # unzip
+ unzip_file(path, path=path.parent)
dir = path.with_suffix('') # dataset directory == zip name
assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
@@ -1036,7 +1103,7 @@ def _hub_ops(self, f, max_dim=1920):
im = im.resize((int(im.width * r), int(im.height * r)))
im.save(f_new, 'JPEG', quality=50, optimize=True) # save
except Exception as e: # use OpenCV
- print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ LOGGER.info(f'WARNING ⚠️ HUB ops PIL failure {f}: {e}')
im = cv2.imread(f)
im_height, im_width = im.shape[:2]
r = max_dim / max(im_height, im_width) # ratio
@@ -1090,3 +1157,65 @@ def process_images(self):
pass
print(f'Done. All images saved to {self.im_dir}')
return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ if self.album_transforms:
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(im)
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + RANK)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=PIN_MEMORY,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/utils/docker/Dockerfile b/utils/docker/Dockerfile
index 2280f209e6a1..e0d4411118f0 100644
--- a/utils/docker/Dockerfile
+++ b/utils/docker/Dockerfile
@@ -3,7 +3,7 @@
# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
-FROM nvcr.io/nvidia/pytorch:22.07-py3
+FROM nvcr.io/nvidia/pytorch:22.12-py3
RUN rm -rf /opt/pytorch # remove 1.2GB dir
# Downloads to user config dir
@@ -16,7 +16,7 @@ RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-
COPY requirements.txt .
RUN python -m pip install --upgrade pip wheel
RUN pip uninstall -y Pillow torchtext # torch torchvision
-RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+RUN pip install --no-cache -r requirements.txt ultralytics albumentations comet gsutil notebook Pillow>=9.1.0 \
'opencv-python<4.6.0.66' \
--extra-index-url https://download.pytorch.org/whl/cu113
@@ -29,7 +29,7 @@ WORKDIR /usr/src/app
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
# Set environment variables
-ENV OMP_NUM_THREADS=8
+ENV OMP_NUM_THREADS=1
# Usage Examples -------------------------------------------------------------------------------------------------------
@@ -49,11 +49,8 @@ ENV OMP_NUM_THREADS=8
# Kill all image-based
# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
-# Bash into running container
-# sudo docker exec -it 5a9b5863d93d bash
-
-# Bash into stopped container
-# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+# DockerHub tag update
+# t=ultralytics/yolov5:latest tnew=ultralytics/yolov5:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew
# Clean up
# docker system prune -a --volumes
diff --git a/utils/docker/Dockerfile-arm64 b/utils/docker/Dockerfile-arm64
index fe92c8d56146..eed1410793a1 100644
--- a/utils/docker/Dockerfile-arm64
+++ b/utils/docker/Dockerfile-arm64
@@ -9,16 +9,16 @@ FROM arm64v8/ubuntu:20.04
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
+ENV DEBIAN_FRONTEND noninteractive
RUN apt update
-RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
-RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
- libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+RUN TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc libgl1-mesa-glx libglib2.0-0 libpython3-dev
# RUN alias python=python3
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
-RUN pip install --no-cache -r requirements.txt gsutil notebook \
+RUN pip install --no-cache -r requirements.txt ultralytics gsutil notebook \
tensorflow-aarch64
# tensorflowjs \
# onnx onnx-simplifier onnxruntime \
@@ -31,12 +31,13 @@ WORKDIR /usr/src/app
# Copy contents
# COPY . /usr/src/app (issues as not a .git directory)
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
# Build and Push
-# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+# t=ultralytics/yolov5:latest-arm64 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
# Pull and Run
-# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
+# t=ultralytics/yolov5:latest-arm64 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/utils/docker/Dockerfile-cpu b/utils/docker/Dockerfile-cpu
index d61dfeffe22c..558f81f00584 100644
--- a/utils/docker/Dockerfile-cpu
+++ b/utils/docker/Dockerfile-cpu
@@ -9,16 +9,18 @@ FROM ubuntu:20.04
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
+ENV DEBIAN_FRONTEND noninteractive
RUN apt update
-RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
-RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+RUN TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3-dev gnupg
# RUN alias python=python3
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
-RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
- coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu tensorflowjs \
+RUN pip install --no-cache -r requirements.txt ultralytics albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime tensorflow-cpu tensorflowjs \
+ # openvino-dev \
--extra-index-url https://download.pytorch.org/whl/cpu
# Create working directory
@@ -28,6 +30,7 @@ WORKDIR /usr/src/app
# Copy contents
# COPY . /usr/src/app (issues as not a .git directory)
RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
diff --git a/utils/downloads.py b/utils/downloads.py
index 9d4780ad28b1..72ea87340eb9 100644
--- a/utils/downloads.py
+++ b/utils/downloads.py
@@ -5,24 +5,21 @@
import logging
import os
-import platform
import subprocess
-import time
import urllib
from pathlib import Path
-from zipfile import ZipFile
import requests
import torch
-def is_url(url, check_online=True):
- # Check if online file exists
+def is_url(url, check=True):
+ # Check if string is URL and check if URL exists
try:
url = str(url)
result = urllib.parse.urlparse(url)
- assert all([result.scheme, result.netloc, result.path]) # check if is url
- return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ assert all([result.scheme, result.netloc]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check else True # check if exists online
except (AssertionError, urllib.request.HTTPError):
return False
@@ -33,6 +30,12 @@ def gsutil_getsize(url=''):
return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+def url_getsize(url='https://ultralytics.com/images/bus.jpg'):
+ # Return downloadable file size in bytes
+ response = requests.head(url, allow_redirects=True)
+ return int(response.headers.get('content-length', -1))
+
+
def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
# Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
from utils.general import LOGGER
@@ -44,24 +47,26 @@ def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
except Exception as e: # url2
- file.unlink(missing_ok=True) # remove partial downloads
+ if file.exists():
+ file.unlink() # remove partial downloads
LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
- os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ os.system(f"curl -# -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
finally:
if not file.exists() or file.stat().st_size < min_bytes: # check
- file.unlink(missing_ok=True) # remove partial downloads
+ if file.exists():
+ file.unlink() # remove partial downloads
LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
LOGGER.info('')
-def attempt_download(file, repo='ultralytics/yolov5', release='v6.1'):
- # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.1', etc.
+def attempt_download(file, repo='ultralytics/yolov5', release='v7.0'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v7.0', etc.
from utils.general import LOGGER
def github_assets(repository, version='latest'):
- # Return GitHub repo tag (i.e. 'v6.1') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ # Return GitHub repo tag (i.e. 'v7.0') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
if version != 'latest':
- version = f'tags/{version}' # i.e. tags/v6.1
+ version = f'tags/{version}' # i.e. tags/v7.0
response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
@@ -79,9 +84,7 @@ def github_assets(repository, version='latest'):
return file
# GitHub assets
- assets = [
- 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
- 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ assets = [f'yolov5{size}{suffix}.pt' for size in 'nsmlx' for suffix in ('', '6', '-cls', '-seg')] # default
try:
tag, assets = github_assets(repo, release)
except Exception:
@@ -99,82 +102,7 @@ def github_assets(repository, version='latest'):
safe_download(
file,
url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
- url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
min_bytes=1E5,
error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
return str(file)
-
-
-def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
- # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
- t = time.time()
- file = Path(file)
- cookie = Path('cookie') # gdrive cookie
- print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
- file.unlink(missing_ok=True) # remove existing file
- cookie.unlink(missing_ok=True) # remove existing cookie
-
- # Attempt file download
- out = "NUL" if platform.system() == "Windows" else "/dev/null"
- os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
- if os.path.exists('cookie'): # large file
- s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
- else: # small file
- s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
- r = os.system(s) # execute, capture return
- cookie.unlink(missing_ok=True) # remove existing cookie
-
- # Error check
- if r != 0:
- file.unlink(missing_ok=True) # remove partial
- print('Download error ') # raise Exception('Download error')
- return r
-
- # Unzip if archive
- if file.suffix == '.zip':
- print('unzipping... ', end='')
- ZipFile(file).extractall(path=file.parent) # unzip
- file.unlink() # remove zip
-
- print(f'Done ({time.time() - t:.1f}s)')
- return r
-
-
-def get_token(cookie="./cookie"):
- with open(cookie) as f:
- for line in f:
- if "download" in line:
- return line.split()[-1]
- return ""
-
-
-# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
-#
-#
-# def upload_blob(bucket_name, source_file_name, destination_blob_name):
-# # Uploads a file to a bucket
-# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
-#
-# storage_client = storage.Client()
-# bucket = storage_client.get_bucket(bucket_name)
-# blob = bucket.blob(destination_blob_name)
-#
-# blob.upload_from_filename(source_file_name)
-#
-# print('File {} uploaded to {}.'.format(
-# source_file_name,
-# destination_blob_name))
-#
-#
-# def download_blob(bucket_name, source_blob_name, destination_file_name):
-# # Uploads a blob from a bucket
-# storage_client = storage.Client()
-# bucket = storage_client.get_bucket(bucket_name)
-# blob = bucket.blob(source_blob_name)
-#
-# blob.download_to_filename(destination_file_name)
-#
-# print('Blob {} downloaded to {}.'.format(
-# source_blob_name,
-# destination_file_name))
diff --git a/utils/flask_rest_api/restapi.py b/utils/flask_rest_api/restapi.py
index 08036dd64490..8482435c861e 100644
--- a/utils/flask_rest_api/restapi.py
+++ b/utils/flask_rest_api/restapi.py
@@ -1,6 +1,6 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Run a Flask REST API exposing a YOLOv5s model
+Run a Flask REST API exposing one or more YOLOv5s models
"""
import argparse
@@ -11,12 +11,13 @@
from PIL import Image
app = Flask(__name__)
+models = {}
-DETECTION_URL = "/v1/object-detection/yolov5s"
+DETECTION_URL = "/v1/object-detection/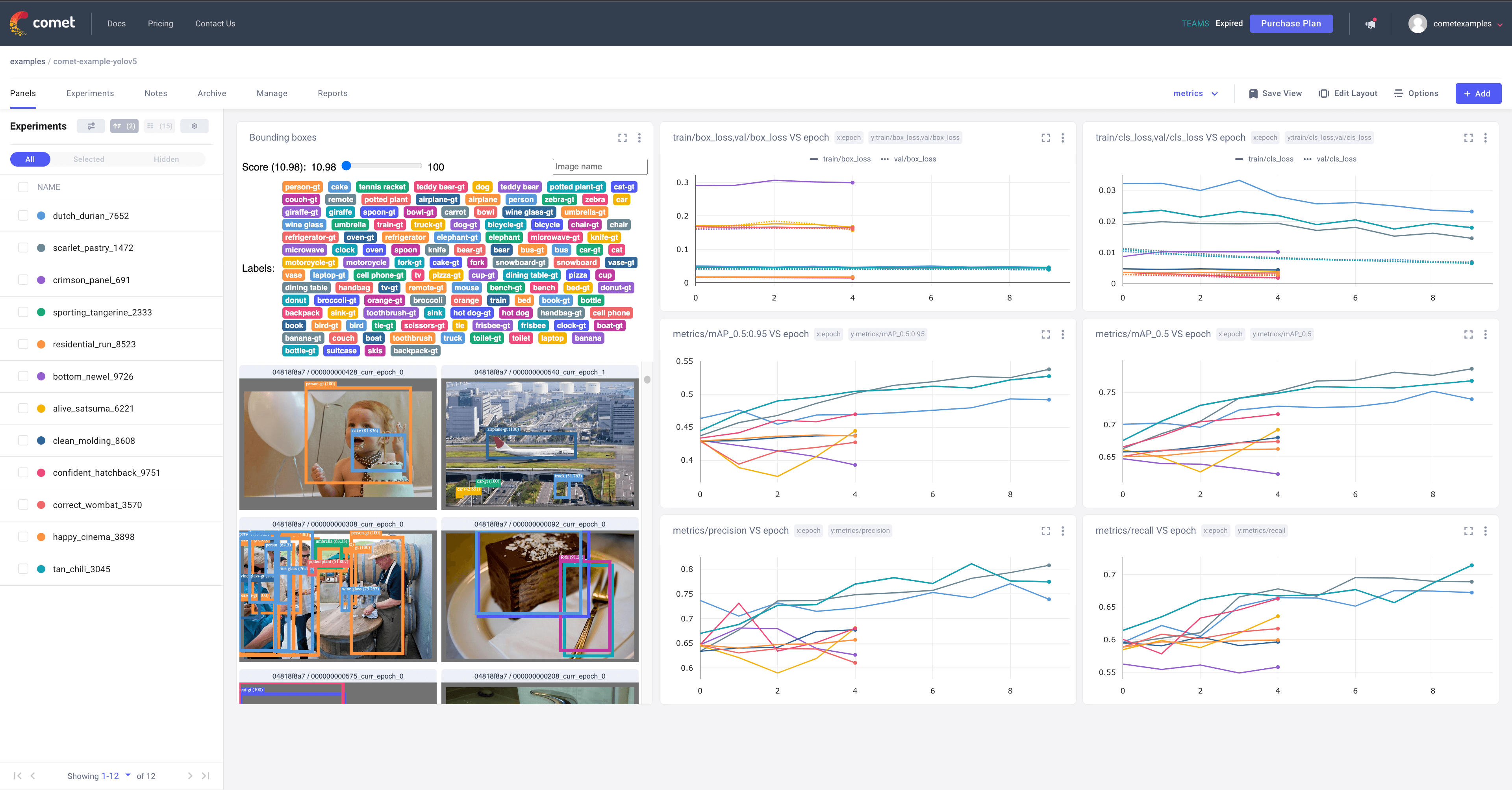 +
+# Try out an Example!
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
+
+Or better yet, try it out yourself in this Colab Notebook
+
+[](https://colab.research.google.com/drive/1RG0WOQyxlDlo5Km8GogJpIEJlg_5lyYO?usp=sharing)
+
+# Log automatically
+
+By default, Comet will log the following items
+
+## Metrics
+- Box Loss, Object Loss, Classification Loss for the training and validation data
+- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
+- Precision and Recall for the validation data
+
+## Parameters
+
+- Model Hyperparameters
+- All parameters passed through the command line options
+
+## Visualizations
+
+- Confusion Matrix of the model predictions on the validation data
+- Plots for the PR and F1 curves across all classes
+- Correlogram of the Class Labels
+
+# Configure Comet Logging
+
+Comet can be configured to log additional data either through command line flags passed to the training script
+or through environment variables.
+
+```shell
+export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
+export COMET_MODEL_NAME=
+
+# Try out an Example!
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
+
+Or better yet, try it out yourself in this Colab Notebook
+
+[](https://colab.research.google.com/drive/1RG0WOQyxlDlo5Km8GogJpIEJlg_5lyYO?usp=sharing)
+
+# Log automatically
+
+By default, Comet will log the following items
+
+## Metrics
+- Box Loss, Object Loss, Classification Loss for the training and validation data
+- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
+- Precision and Recall for the validation data
+
+## Parameters
+
+- Model Hyperparameters
+- All parameters passed through the command line options
+
+## Visualizations
+
+- Confusion Matrix of the model predictions on the validation data
+- Plots for the PR and F1 curves across all classes
+- Correlogram of the Class Labels
+
+# Configure Comet Logging
+
+Comet can be configured to log additional data either through command line flags passed to the training script
+or through environment variables.
+
+```shell
+export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
+export COMET_MODEL_NAME= +
+You can preview the data directly in the Comet UI.
+
+
+You can preview the data directly in the Comet UI.
+ +
+Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file
+
+
+Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file
+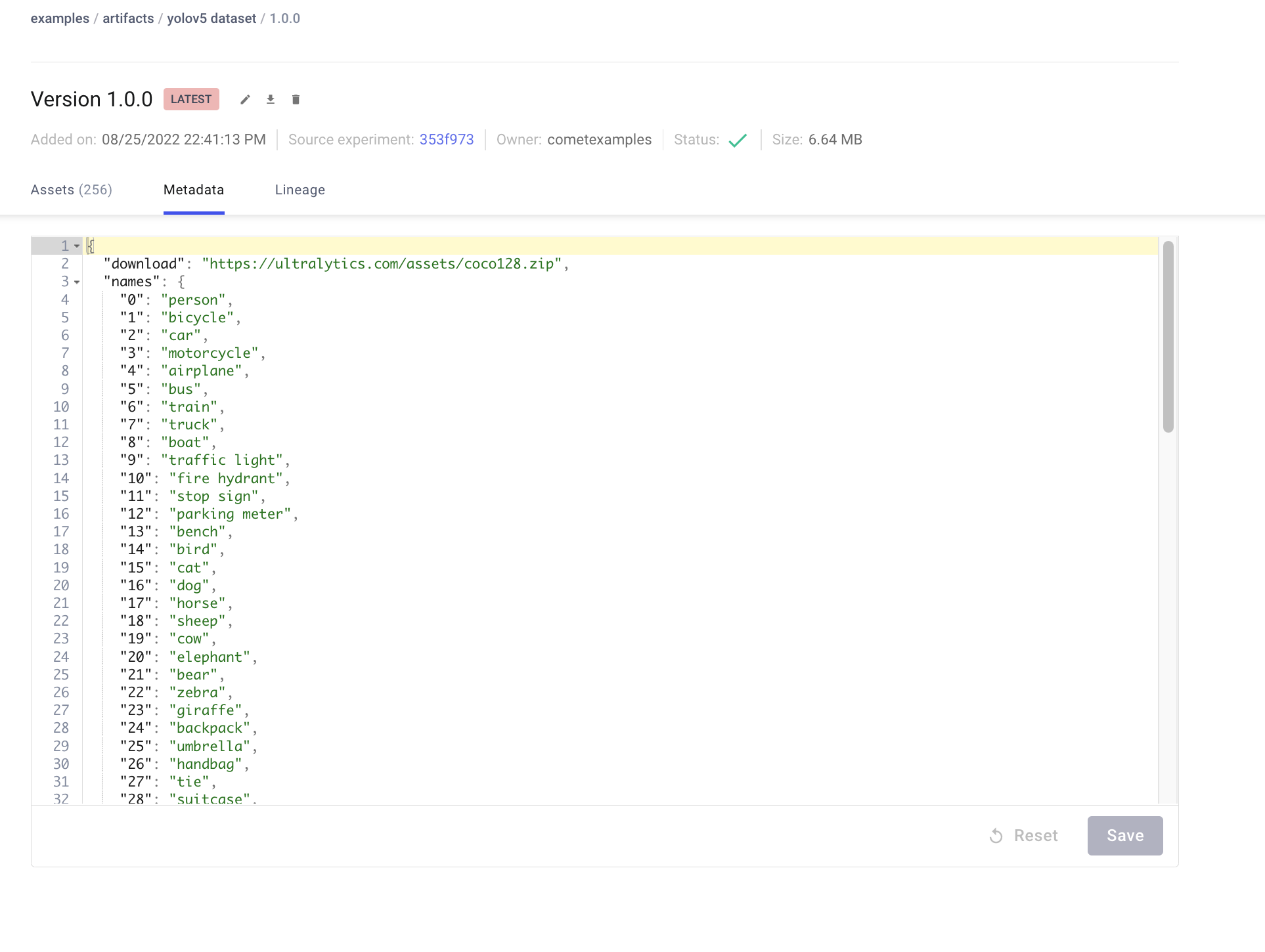 +
+### Using a saved Artifact
+
+If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
+
+```
+# contents of artifact.yaml file
+path: "comet://
+
+### Using a saved Artifact
+
+If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
+
+```
+# contents of artifact.yaml file
+path: "comet:// +
+## Resuming a Training Run
+
+If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
+
+The Run Path has the following format `comet://
+
+## Resuming a Training Run
+
+If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
+
+The Run Path has the following format `comet://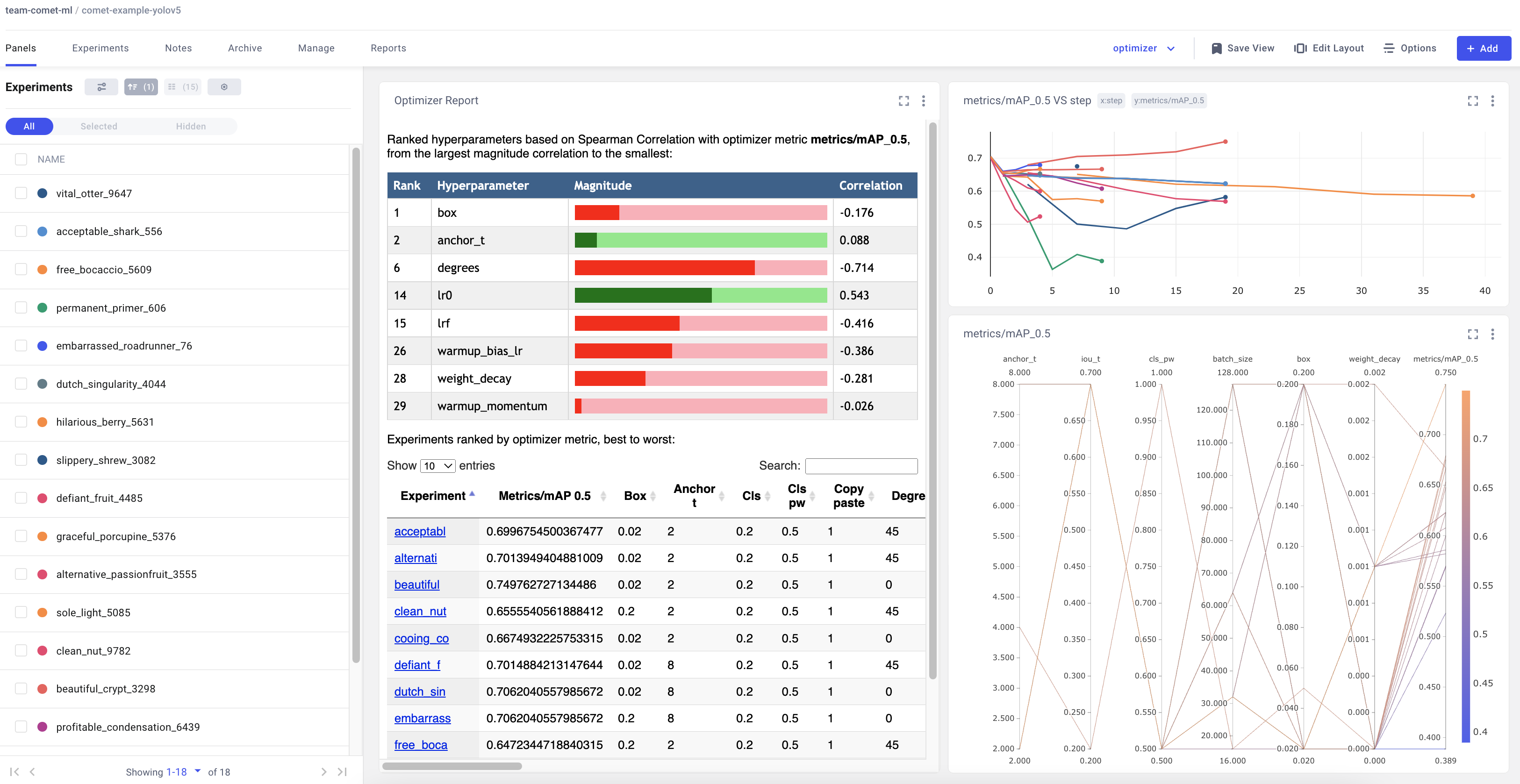 diff --git a/utils/loggers/comet/__init__.py b/utils/loggers/comet/__init__.py
new file mode 100644
index 000000000000..b0318f88d6a6
--- /dev/null
+++ b/utils/loggers/comet/__init__.py
@@ -0,0 +1,508 @@
+import glob
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+try:
+ import comet_ml
+
+ # Project Configuration
+ config = comet_ml.config.get_config()
+ COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+ COMET_PROJECT_NAME = None
+
+import PIL
+import torch
+import torchvision.transforms as T
+import yaml
+
+from utils.dataloaders import img2label_paths
+from utils.general import check_dataset, scale_boxes, xywh2xyxy
+from utils.metrics import box_iou
+
+COMET_PREFIX = "comet://"
+
+COMET_MODE = os.getenv("COMET_MODE", "online")
+
+# Model Saving Settings
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+
+# Dataset Artifact Settings
+COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
+
+# Evaluation Settings
+COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
+COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
+COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
+
+# Confusion Matrix Settings
+CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
+IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
+
+# Batch Logging Settings
+COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
+COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
+COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
+COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
+
+RANK = int(os.getenv("RANK", -1))
+
+to_pil = T.ToPILImage()
+
+
+class CometLogger:
+ """Log metrics, parameters, source code, models and much more
+ with Comet
+ """
+
+ def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
+ self.job_type = job_type
+ self.opt = opt
+ self.hyp = hyp
+
+ # Comet Flags
+ self.comet_mode = COMET_MODE
+
+ self.save_model = opt.save_period > -1
+ self.model_name = COMET_MODEL_NAME
+
+ # Batch Logging Settings
+ self.log_batch_metrics = COMET_LOG_BATCH_METRICS
+ self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
+
+ # Dataset Artifact Settings
+ self.upload_dataset = self.opt.upload_dataset if self.opt.upload_dataset else COMET_UPLOAD_DATASET
+ self.resume = self.opt.resume
+
+ # Default parameters to pass to Experiment objects
+ self.default_experiment_kwargs = {
+ "log_code": False,
+ "log_env_gpu": True,
+ "log_env_cpu": True,
+ "project_name": COMET_PROJECT_NAME,}
+ self.default_experiment_kwargs.update(experiment_kwargs)
+ self.experiment = self._get_experiment(self.comet_mode, run_id)
+
+ self.data_dict = self.check_dataset(self.opt.data)
+ self.class_names = self.data_dict["names"]
+ self.num_classes = self.data_dict["nc"]
+
+ self.logged_images_count = 0
+ self.max_images = COMET_MAX_IMAGE_UPLOADS
+
+ if run_id is None:
+ self.experiment.log_other("Created from", "YOLOv5")
+ if not isinstance(self.experiment, comet_ml.OfflineExperiment):
+ workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
+ self.experiment.log_other(
+ "Run Path",
+ f"{workspace}/{project_name}/{experiment_id}",
+ )
+ self.log_parameters(vars(opt))
+ self.log_parameters(self.opt.hyp)
+ self.log_asset_data(
+ self.opt.hyp,
+ name="hyperparameters.json",
+ metadata={"type": "hyp-config-file"},
+ )
+ self.log_asset(
+ f"{self.opt.save_dir}/opt.yaml",
+ metadata={"type": "opt-config-file"},
+ )
+
+ self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
+
+ if hasattr(self.opt, "conf_thres"):
+ self.conf_thres = self.opt.conf_thres
+ else:
+ self.conf_thres = CONF_THRES
+ if hasattr(self.opt, "iou_thres"):
+ self.iou_thres = self.opt.iou_thres
+ else:
+ self.iou_thres = IOU_THRES
+
+ self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
+
+ self.comet_log_predictions = COMET_LOG_PREDICTIONS
+ if self.opt.bbox_interval == -1:
+ self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
+ else:
+ self.comet_log_prediction_interval = self.opt.bbox_interval
+
+ if self.comet_log_predictions:
+ self.metadata_dict = {}
+ self.logged_image_names = []
+
+ self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
+
+ self.experiment.log_others({
+ "comet_mode": COMET_MODE,
+ "comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
+ "comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
+ "comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
+ "comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
+ "comet_model_name": COMET_MODEL_NAME,})
+
+ # Check if running the Experiment with the Comet Optimizer
+ if hasattr(self.opt, "comet_optimizer_id"):
+ self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
+ self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
+ self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
+ self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
+
+ def _get_experiment(self, mode, experiment_id=None):
+ if mode == "offline":
+ if experiment_id is not None:
+ return comet_ml.ExistingOfflineExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.OfflineExperiment(**self.default_experiment_kwargs,)
+
+ else:
+ try:
+ if experiment_id is not None:
+ return comet_ml.ExistingExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.Experiment(**self.default_experiment_kwargs)
+
+ except ValueError:
+ logger.warning("COMET WARNING: "
+ "Comet credentials have not been set. "
+ "Comet will default to offline logging. "
+ "Please set your credentials to enable online logging.")
+ return self._get_experiment("offline", experiment_id)
+
+ return
+
+ def log_metrics(self, log_dict, **kwargs):
+ self.experiment.log_metrics(log_dict, **kwargs)
+
+ def log_parameters(self, log_dict, **kwargs):
+ self.experiment.log_parameters(log_dict, **kwargs)
+
+ def log_asset(self, asset_path, **kwargs):
+ self.experiment.log_asset(asset_path, **kwargs)
+
+ def log_asset_data(self, asset, **kwargs):
+ self.experiment.log_asset_data(asset, **kwargs)
+
+ def log_image(self, img, **kwargs):
+ self.experiment.log_image(img, **kwargs)
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ if not self.save_model:
+ return
+
+ model_metadata = {
+ "fitness_score": fitness_score[-1],
+ "epochs_trained": epoch + 1,
+ "save_period": opt.save_period,
+ "total_epochs": opt.epochs,}
+
+ model_files = glob.glob(f"{path}/*.pt")
+ for model_path in model_files:
+ name = Path(model_path).name
+
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ metadata=model_metadata,
+ overwrite=True,
+ )
+
+ def check_dataset(self, data_file):
+ with open(data_file) as f:
+ data_config = yaml.safe_load(f)
+
+ if data_config['path'].startswith(COMET_PREFIX):
+ path = data_config['path'].replace(COMET_PREFIX, "")
+ data_dict = self.download_dataset_artifact(path)
+
+ return data_dict
+
+ self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
+
+ return check_dataset(data_file)
+
+ def log_predictions(self, image, labelsn, path, shape, predn):
+ if self.logged_images_count >= self.max_images:
+ return
+ detections = predn[predn[:, 4] > self.conf_thres]
+ iou = box_iou(labelsn[:, 1:], detections[:, :4])
+ mask, _ = torch.where(iou > self.iou_thres)
+ if len(mask) == 0:
+ return
+
+ filtered_detections = detections[mask]
+ filtered_labels = labelsn[mask]
+
+ image_id = path.split("/")[-1].split(".")[0]
+ image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
+ if image_name not in self.logged_image_names:
+ native_scale_image = PIL.Image.open(path)
+ self.log_image(native_scale_image, name=image_name)
+ self.logged_image_names.append(image_name)
+
+ metadata = []
+ for cls, *xyxy in filtered_labels.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}-gt",
+ "score": 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+ for *xyxy, conf, cls in filtered_detections.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}",
+ "score": conf * 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+
+ self.metadata_dict[image_name] = metadata
+ self.logged_images_count += 1
+
+ return
+
+ def preprocess_prediction(self, image, labels, shape, pred):
+ nl, _ = labels.shape[0], pred.shape[0]
+
+ # Predictions
+ if self.opt.single_cls:
+ pred[:, 5] = 0
+
+ predn = pred.clone()
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
+
+ labelsn = None
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
+
+ return predn, labelsn
+
+ def add_assets_to_artifact(self, artifact, path, asset_path, split):
+ img_paths = sorted(glob.glob(f"{asset_path}/*"))
+ label_paths = img2label_paths(img_paths)
+
+ for image_file, label_file in zip(img_paths, label_paths):
+ image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
+
+ try:
+ artifact.add(image_file, logical_path=image_logical_path, metadata={"split": split})
+ artifact.add(label_file, logical_path=label_logical_path, metadata={"split": split})
+ except ValueError as e:
+ logger.error('COMET ERROR: Error adding file to Artifact. Skipping file.')
+ logger.error(f"COMET ERROR: {e}")
+ continue
+
+ return artifact
+
+ def upload_dataset_artifact(self):
+ dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
+ path = str((ROOT / Path(self.data_dict["path"])).resolve())
+
+ metadata = self.data_dict.copy()
+ for key in ["train", "val", "test"]:
+ split_path = metadata.get(key)
+ if split_path is not None:
+ metadata[key] = split_path.replace(path, "")
+
+ artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
+ for key in metadata.keys():
+ if key in ["train", "val", "test"]:
+ if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
+ continue
+
+ asset_path = self.data_dict.get(key)
+ if asset_path is not None:
+ artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
+
+ self.experiment.log_artifact(artifact)
+
+ return
+
+ def download_dataset_artifact(self, artifact_path):
+ logged_artifact = self.experiment.get_artifact(artifact_path)
+ artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
+ logged_artifact.download(artifact_save_dir)
+
+ metadata = logged_artifact.metadata
+ data_dict = metadata.copy()
+ data_dict["path"] = artifact_save_dir
+
+ metadata_names = metadata.get("names")
+ if type(metadata_names) == dict:
+ data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
+ elif type(metadata_names) == list:
+ data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
+ else:
+ raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
+
+ data_dict = self.update_data_paths(data_dict)
+ return data_dict
+
+ def update_data_paths(self, data_dict):
+ path = data_dict.get("path", "")
+
+ for split in ["train", "val", "test"]:
+ if data_dict.get(split):
+ split_path = data_dict.get(split)
+ data_dict[split] = (f"{path}/{split_path}" if isinstance(split, str) else [
+ f"{path}/{x}" for x in split_path])
+
+ return data_dict
+
+ def on_pretrain_routine_end(self, paths):
+ if self.opt.resume:
+ return
+
+ for path in paths:
+ self.log_asset(str(path))
+
+ if self.upload_dataset:
+ if not self.resume:
+ self.upload_dataset_artifact()
+
+ return
+
+ def on_train_start(self):
+ self.log_parameters(self.hyp)
+
+ def on_train_epoch_start(self):
+ return
+
+ def on_train_epoch_end(self, epoch):
+ self.experiment.curr_epoch = epoch
+
+ return
+
+ def on_train_batch_start(self):
+ return
+
+ def on_train_batch_end(self, log_dict, step):
+ self.experiment.curr_step = step
+ if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
+ self.log_metrics(log_dict, step=step)
+
+ return
+
+ def on_train_end(self, files, save_dir, last, best, epoch, results):
+ if self.comet_log_predictions:
+ curr_epoch = self.experiment.curr_epoch
+ self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
+
+ for f in files:
+ self.log_asset(f, metadata={"epoch": epoch})
+ self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
+
+ if not self.opt.evolve:
+ model_path = str(best if best.exists() else last)
+ name = Path(model_path).name
+ if self.save_model:
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ overwrite=True,
+ )
+
+ # Check if running Experiment with Comet Optimizer
+ if hasattr(self.opt, 'comet_optimizer_id'):
+ metric = results.get(self.opt.comet_optimizer_metric)
+ self.experiment.log_other('optimizer_metric_value', metric)
+
+ self.finish_run()
+
+ def on_val_start(self):
+ return
+
+ def on_val_batch_start(self):
+ return
+
+ def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
+ if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
+ return
+
+ for si, pred in enumerate(outputs):
+ if len(pred) == 0:
+ continue
+
+ image = images[si]
+ labels = targets[targets[:, 0] == si, 1:]
+ shape = shapes[si]
+ path = paths[si]
+ predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
+ if labelsn is not None:
+ self.log_predictions(image, labelsn, path, shape, predn)
+
+ return
+
+ def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
+ if self.comet_log_per_class_metrics:
+ if self.num_classes > 1:
+ for i, c in enumerate(ap_class):
+ class_name = self.class_names[c]
+ self.experiment.log_metrics(
+ {
+ 'mAP@.5': ap50[i],
+ 'mAP@.5:.95': ap[i],
+ 'precision': p[i],
+ 'recall': r[i],
+ 'f1': f1[i],
+ 'true_positives': tp[i],
+ 'false_positives': fp[i],
+ 'support': nt[c]},
+ prefix=class_name)
+
+ if self.comet_log_confusion_matrix:
+ epoch = self.experiment.curr_epoch
+ class_names = list(self.class_names.values())
+ class_names.append("background")
+ num_classes = len(class_names)
+
+ self.experiment.log_confusion_matrix(
+ matrix=confusion_matrix.matrix,
+ max_categories=num_classes,
+ labels=class_names,
+ epoch=epoch,
+ column_label='Actual Category',
+ row_label='Predicted Category',
+ file_name=f"confusion-matrix-epoch-{epoch}.json",
+ )
+
+ def on_fit_epoch_end(self, result, epoch):
+ self.log_metrics(result, epoch=epoch)
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ def on_params_update(self, params):
+ self.log_parameters(params)
+
+ def finish_run(self):
+ self.experiment.end()
diff --git a/utils/loggers/comet/comet_utils.py b/utils/loggers/comet/comet_utils.py
new file mode 100644
index 000000000000..3cbd45156b57
--- /dev/null
+++ b/utils/loggers/comet/comet_utils.py
@@ -0,0 +1,150 @@
+import logging
+import os
+from urllib.parse import urlparse
+
+try:
+ import comet_ml
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+
+import yaml
+
+logger = logging.getLogger(__name__)
+
+COMET_PREFIX = "comet://"
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
+
+
+def download_model_checkpoint(opt, experiment):
+ model_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(model_dir, exist_ok=True)
+
+ model_name = COMET_MODEL_NAME
+ model_asset_list = experiment.get_model_asset_list(model_name)
+
+ if len(model_asset_list) == 0:
+ logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
+ return
+
+ model_asset_list = sorted(
+ model_asset_list,
+ key=lambda x: x["step"],
+ reverse=True,
+ )
+ logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
+
+ resource_url = urlparse(opt.weights)
+ checkpoint_filename = resource_url.query
+
+ if checkpoint_filename:
+ asset_id = logged_checkpoint_map.get(checkpoint_filename)
+ else:
+ asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
+ checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
+
+ if asset_id is None:
+ logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
+ return
+
+ try:
+ logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
+ asset_filename = checkpoint_filename
+
+ model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ model_download_path = f"{model_dir}/{asset_filename}"
+ with open(model_download_path, "wb") as f:
+ f.write(model_binary)
+
+ opt.weights = model_download_path
+
+ except Exception as e:
+ logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
+ logger.exception(e)
+
+
+def set_opt_parameters(opt, experiment):
+ """Update the opts Namespace with parameters
+ from Comet's ExistingExperiment when resuming a run
+
+ Args:
+ opt (argparse.Namespace): Namespace of command line options
+ experiment (comet_ml.APIExperiment): Comet API Experiment object
+ """
+ asset_list = experiment.get_asset_list()
+ resume_string = opt.resume
+
+ for asset in asset_list:
+ if asset["fileName"] == "opt.yaml":
+ asset_id = asset["assetId"]
+ asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ opt_dict = yaml.safe_load(asset_binary)
+ for key, value in opt_dict.items():
+ setattr(opt, key, value)
+ opt.resume = resume_string
+
+ # Save hyperparameters to YAML file
+ # Necessary to pass checks in training script
+ save_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(save_dir, exist_ok=True)
+
+ hyp_yaml_path = f"{save_dir}/hyp.yaml"
+ with open(hyp_yaml_path, "w") as f:
+ yaml.dump(opt.hyp, f)
+ opt.hyp = hyp_yaml_path
+
+
+def check_comet_weights(opt):
+ """Downloads model weights from Comet and updates the
+ weights path to point to saved weights location
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if weights are successfully downloaded
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.weights, str):
+ if opt.weights.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.weights)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ download_model_checkpoint(opt, experiment)
+ return True
+
+ return None
+
+
+def check_comet_resume(opt):
+ """Restores run parameters to its original state based on the model checkpoint
+ and logged Experiment parameters.
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if the run is restored successfully
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.resume)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ set_opt_parameters(opt, experiment)
+ download_model_checkpoint(opt, experiment)
+
+ return True
+
+ return None
diff --git a/utils/loggers/comet/hpo.py b/utils/loggers/comet/hpo.py
new file mode 100644
index 000000000000..7dd5c92e8de1
--- /dev/null
+++ b/utils/loggers/comet/hpo.py
@@ -0,0 +1,118 @@
+import argparse
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+import comet_ml
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+# Project Configuration
+config = comet_ml.config.get_config()
+COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+
+
+def get_args(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ # Comet Arguments
+ parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
+ parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
+ parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
+ parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
+ parser.add_argument("--comet_optimizer_workers",
+ type=int,
+ default=1,
+ help="Comet: Number of Parallel Workers to use with the Comet Optimizer.")
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def run(parameters, opt):
+ hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
+
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.batch_size = parameters.get("batch_size")
+ opt.epochs = parameters.get("epochs")
+
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ opt = get_args(known=True)
+
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.project = str(opt.project)
+
+ optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
+ if optimizer_id is None:
+ with open(opt.comet_optimizer_config) as f:
+ optimizer_config = json.load(f)
+ optimizer = comet_ml.Optimizer(optimizer_config)
+ else:
+ optimizer = comet_ml.Optimizer(optimizer_id)
+
+ opt.comet_optimizer_id = optimizer.id
+ status = optimizer.status()
+
+ opt.comet_optimizer_objective = status["spec"]["objective"]
+ opt.comet_optimizer_metric = status["spec"]["metric"]
+
+ logger.info("COMET INFO: Starting Hyperparameter Sweep")
+ for parameter in optimizer.get_parameters():
+ run(parameter["parameters"], opt)
diff --git a/utils/loggers/comet/optimizer_config.json b/utils/loggers/comet/optimizer_config.json
new file mode 100644
index 000000000000..83ddddab6f20
--- /dev/null
+++ b/utils/loggers/comet/optimizer_config.json
@@ -0,0 +1,209 @@
+{
+ "algorithm": "random",
+ "parameters": {
+ "anchor_t": {
+ "type": "discrete",
+ "values": [
+ 2,
+ 8
+ ]
+ },
+ "batch_size": {
+ "type": "discrete",
+ "values": [
+ 16,
+ 32,
+ 64
+ ]
+ },
+ "box": {
+ "type": "discrete",
+ "values": [
+ 0.02,
+ 0.2
+ ]
+ },
+ "cls": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "cls_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "copy_paste": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "degrees": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 45
+ ]
+ },
+ "epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "fl_gamma": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "fliplr": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "flipud": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_h": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_s": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_v": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "iou_t": {
+ "type": "discrete",
+ "values": [
+ 0.7
+ ]
+ },
+ "lr0": {
+ "type": "discrete",
+ "values": [
+ 1e-05,
+ 0.1
+ ]
+ },
+ "lrf": {
+ "type": "discrete",
+ "values": [
+ 0.01,
+ 1
+ ]
+ },
+ "mixup": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "momentum": {
+ "type": "discrete",
+ "values": [
+ 0.6
+ ]
+ },
+ "mosaic": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "obj": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "obj_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "optimizer": {
+ "type": "categorical",
+ "values": [
+ "SGD",
+ "Adam",
+ "AdamW"
+ ]
+ },
+ "perspective": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "scale": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "shear": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "translate": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "warmup_bias_lr": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.2
+ ]
+ },
+ "warmup_epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "warmup_momentum": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.95
+ ]
+ },
+ "weight_decay": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.001
+ ]
+ }
+ },
+ "spec": {
+ "maxCombo": 0,
+ "metric": "metrics/mAP_0.5",
+ "objective": "maximize"
+ },
+ "trials": 1
+}
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
index e850d2ac8a7c..238f4edbf2a0 100644
--- a/utils/loggers/wandb/wandb_utils.py
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -132,6 +132,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
job_type (str) -- To set the job_type for this run
"""
+ # Temporary-fix
+ if opt.upload_dataset:
+ opt.upload_dataset = False
+ # LOGGER.info("Uploading Dataset functionality is not being supported temporarily due to a bug.")
+
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
diff --git a/utils/metrics.py b/utils/metrics.py
index 08880cd3f212..c01f823a77a1 100644
--- a/utils/metrics.py
+++ b/utils/metrics.py
@@ -11,6 +11,8 @@
import numpy as np
import torch
+from utils import TryExcept, threaded
+
def fitness(x):
# Model fitness as a weighted combination of metrics
@@ -26,7 +28,7 @@ def smooth(y, f=0.05):
return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
-def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
@@ -81,10 +83,10 @@ def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
names = dict(enumerate(names)) # to dict
if plot:
- plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
- plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
- plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
- plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
@@ -141,7 +143,7 @@ def process_batch(self, detections, labels):
"""
if detections is None:
gt_classes = labels.int()
- for i, gc in enumerate(gt_classes):
+ for gc in gt_classes:
self.matrix[self.nc, gc] += 1 # background FN
return
@@ -168,15 +170,12 @@ def process_batch(self, detections, labels):
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
- self.matrix[self.nc, gc] += 1 # background FP
+ self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
- self.matrix[dc, self.nc] += 1 # background FN
-
- def matrix(self):
- return self.matrix
+ self.matrix[dc, self.nc] += 1 # predicted background
def tp_fp(self):
tp = self.matrix.diagonal() # true positives
@@ -184,36 +183,36 @@ def tp_fp(self):
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
+ @TryExcept('WARNING ⚠️ ConfusionMatrix plot failure')
def plot(self, normalize=True, save_dir='', names=()):
- try:
- import seaborn as sn
-
- array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
- array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
-
- fig = plt.figure(figsize=(12, 9), tight_layout=True)
- nc, nn = self.nc, len(names) # number of classes, names
- sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
- labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
- with warnings.catch_warnings():
- warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
- sn.heatmap(array,
- annot=nc < 30,
- annot_kws={
- "size": 8},
- cmap='Blues',
- fmt='.2f',
- square=True,
- vmin=0.0,
- xticklabels=names + ['background FP'] if labels else "auto",
- yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
- fig.axes[0].set_xlabel('True')
- fig.axes[0].set_ylabel('Predicted')
- plt.title('Confusion Matrix')
- fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
- plt.close()
- except Exception as e:
- print(f'WARNING: ConfusionMatrix plot failure: {e}')
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ ticklabels = (names + ['background']) if labels else "auto"
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=ticklabels,
+ yticklabels=ticklabels).set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
def print(self):
for i in range(self.nc + 1):
@@ -225,19 +224,19 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
- (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
- b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
- b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
- w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
- w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
+ w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
+ w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
- inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
- (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+ inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
+ (b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
@@ -245,13 +244,13 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
- cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
- ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
+ ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
- v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
@@ -261,11 +260,6 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
return iou # IoU
-def box_area(box):
- # box = xyxy(4,n)
- return (box[2] - box[0]) * (box[3] - box[1])
-
-
def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
@@ -280,11 +274,11 @@ def box_iou(box1, box2, eps=1e-7):
"""
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
- (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ (a1, a2), (b1, b2) = box1.unsqueeze(1).chunk(2, 2), box2.unsqueeze(0).chunk(2, 2)
inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
# IoU = inter / (area1 + area2 - inter)
- return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+ return inter / ((a2 - a1).prod(2) + (b2 - b1).prod(2) - inter + eps)
def bbox_ioa(box1, box2, eps=1e-7):
@@ -320,6 +314,7 @@ def wh_iou(wh1, wh2, eps=1e-7):
# Plots ----------------------------------------------------------------------------------------------------------------
+@threaded
def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
# Precision-recall curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -336,12 +331,13 @@ def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
ax.set_ylabel('Precision')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- plt.title('Precision-Recall Curve')
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
fig.savefig(save_dir, dpi=250)
- plt.close()
+ plt.close(fig)
+@threaded
def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
# Metric-confidence curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -358,7 +354,7 @@ def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confi
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- plt.title(f'{ylabel}-Confidence Curve')
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
fig.savefig(save_dir, dpi=250)
- plt.close()
+ plt.close(fig)
diff --git a/utils/plots.py b/utils/plots.py
index d050f5d36aba..d2f232de0e97 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -3,6 +3,7 @@
Plotting utils
"""
+import contextlib
import math
import os
from copy import copy
@@ -18,9 +19,11 @@
import torch
from PIL import Image, ImageDraw, ImageFont
-from utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,
- increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_boxes, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
from utils.metrics import fitness
+from utils.segment.general import scale_image
# Settings
RANK = int(os.getenv('RANK', -1))
@@ -111,14 +114,51 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
thickness=tf,
lineType=cv2.LINE_AA)
+ def masks(self, masks, colors, im_gpu, alpha=0.5, retina_masks=False):
+ """Plot masks at once.
+ Args:
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ im_gpu (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ alpha (float): mask transparency: 0.0 fully transparent, 1.0 opaque
+ """
+ if self.pil:
+ # convert to numpy first
+ self.im = np.asarray(self.im).copy()
+ if len(masks) == 0:
+ self.im[:] = im_gpu.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+ colors = torch.tensor(colors, device=im_gpu.device, dtype=torch.float32) / 255.0
+ colors = colors[:, None, None] # shape(n,1,1,3)
+ masks = masks.unsqueeze(3) # shape(n,h,w,1)
+ masks_color = masks * (colors * alpha) # shape(n,h,w,3)
+
+ inv_alph_masks = (1 - masks * alpha).cumprod(0) # shape(n,h,w,1)
+ mcs = (masks_color * inv_alph_masks).sum(0) * 2 # mask color summand shape(n,h,w,3)
+
+ im_gpu = im_gpu.flip(dims=[0]) # flip channel
+ im_gpu = im_gpu.permute(1, 2, 0).contiguous() # shape(h,w,3)
+ im_gpu = im_gpu * inv_alph_masks[-1] + mcs
+ im_mask = (im_gpu * 255).byte().cpu().numpy()
+ self.im[:] = im_mask if retina_masks else scale_image(im_gpu.shape, im_mask, self.im.shape)
+ if self.pil:
+ # convert im back to PIL and update draw
+ self.fromarray(self.im)
+
def rectangle(self, xy, fill=None, outline=None, width=1):
# Add rectangle to image (PIL-only)
self.draw.rectangle(xy, fill, outline, width)
- def text(self, xy, text, txt_color=(255, 255, 255)):
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
# Add text to image (PIL-only)
- w, h = self.font.getsize(text) # text width, height
- self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
def result(self):
# Return annotated image as array
@@ -148,7 +188,6 @@ def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detec
ax[i].axis('off')
LOGGER.info(f'Saving {f}... ({n}/{channels})')
- plt.title('Features')
plt.savefig(f, dpi=300, bbox_inches='tight')
plt.close()
np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
@@ -176,27 +215,31 @@ def butter_lowpass(cutoff, fs, order):
return filtfilt(b, a, data) # forward-backward filter
-def output_to_target(output):
- # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
targets = []
for i, o in enumerate(output):
- for *box, conf, cls in o.cpu().numpy():
- targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
- return np.array(targets)
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
@threaded
-def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
# Plot image grid with labels
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
- if np.max(images[0]) <= 1:
- images *= 255 # de-normalise (optional)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
@@ -221,7 +264,7 @@ def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
- annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
@@ -339,8 +382,7 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
plt.savefig(f, dpi=300)
-@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
-@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path('')):
# plot dataset labels
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
@@ -357,14 +399,12 @@ def plot_labels(labels, names=(), save_dir=Path('')):
matplotlib.use('svg') # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
- try: # color histogram bars by class
+ with contextlib.suppress(Exception): # color histogram bars by class
[y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
- except Exception:
- pass
ax[0].set_ylabel('instances')
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
- ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel('classes')
sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
@@ -388,6 +428,35 @@ def plot_labels(labels, names=(), save_dir=Path('')):
plt.close()
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
# Plot evolve.csv hyp evolution results
evolve_csv = Path(evolve_csv)
@@ -480,7 +549,7 @@ def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False,
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
- clip_coords(xyxy, im.shape)
+ clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
diff --git a/utils/segment/__init__.py b/utils/segment/__init__.py
new file mode 100644
index 000000000000..e69de29bb2d1
diff --git a/utils/segment/augmentations.py b/utils/segment/augmentations.py
new file mode 100644
index 000000000000..169addedf0f5
--- /dev/null
+++ b/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/utils/segment/dataloaders.py b/utils/segment/dataloaders.py
new file mode 100644
index 000000000000..d66b36115e3f
--- /dev/null
+++ b/utils/segment/dataloaders.py
@@ -0,0 +1,332 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+RANK = int(os.getenv('RANK', -1))
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False,
+ seed=0):
+ if rect and shuffle:
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + seed + RANK)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ min_items=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, min_items, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/utils/segment/general.py b/utils/segment/general.py
new file mode 100644
index 000000000000..9da894538665
--- /dev/null
+++ b/utils/segment/general.py
@@ -0,0 +1,160 @@
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+
+
+def crop_mask(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ protos: [mask_dim, mask_h, mask_w]
+ masks_in: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape: input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop_mask(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask_native(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ protos: [mask_dim, mask_h, mask_w]
+ masks_in: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape: input_image_size, (h, w)
+
+ return: h, w, n
+ """
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ gain = min(mh / shape[0], mw / shape[1]) # gain = old / new
+ pad = (mw - shape[1] * gain) / 2, (mh - shape[0] * gain) / 2 # wh padding
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(mh - pad[1]), int(mw - pad[0])
+ masks = masks[:, top:bottom, left:right]
+
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ """
+ # Rescale coordinates (xyxy) from im1_shape to im0_shape
+ if ratio_pad is None: # calculate from im0_shape
+ gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
+ pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
+ else:
+ pad = ratio_pad[1]
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ masks = masks[top:bottom, left:right]
+ # masks = masks.permute(2, 0, 1).contiguous()
+ # masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
+
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks2segments(masks, strategy='largest'):
+ # Convert masks(n,160,160) into segments(n,xy)
+ segments = []
+ for x in masks.int().cpu().numpy().astype('uint8'):
+ c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
+ if c:
+ if strategy == 'concat': # concatenate all segments
+ c = np.concatenate([x.reshape(-1, 2) for x in c])
+ elif strategy == 'largest': # select largest segment
+ c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
+ else:
+ c = np.zeros((0, 2)) # no segments found
+ segments.append(c.astype('float32'))
+ return segments
diff --git a/utils/segment/loss.py b/utils/segment/loss.py
new file mode 100644
index 000000000000..b45b2c27e0a0
--- /dev/null
+++ b/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop_mask
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/utils/segment/metrics.py b/utils/segment/metrics.py
new file mode 100644
index 000000000000..b09ce23fb9e3
--- /dev/null
+++ b/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/utils/segment/plots.py b/utils/segment/plots.py
new file mode 100644
index 000000000000..9b90900b3772
--- /dev/null
+++ b/utils/segment/plots.py
@@ -0,0 +1,143 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(bool)
+ else:
+ mask = image_masks[j].astype(bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11])
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 1ceb0aa346e9..77549b005ceb 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -32,6 +32,7 @@
# Suppress PyTorch warnings
warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+warnings.filterwarnings('ignore', category=UserWarning)
def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
@@ -42,6 +43,15 @@ def decorate(fn):
return decorate
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
def smart_DDP(model):
# Model DDP creation with checks
assert not check_version(torch.__version__, '1.12.0', pinned=True), \
@@ -53,6 +63,28 @@ def smart_DDP(model):
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias is not None)
+
+
@contextmanager
def torch_distributed_zero_first(local_rank: int):
# Decorator to make all processes in distributed training wait for each local_master to do something
@@ -86,7 +118,7 @@ def select_device(device='', batch_size=0, newline=True):
assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
- if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
@@ -117,14 +149,13 @@ def time_sync():
def profile(input, ops, n=10, device=None):
- # YOLOv5 speed/memory/FLOPs profiler
- #
- # Usage:
- # input = torch.randn(16, 3, 640, 640)
- # m1 = lambda x: x * torch.sigmoid(x)
- # m2 = nn.SiLU()
- # profile(input, [m1, m2], n=100) # profile over 100 iterations
-
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
results = []
if not isinstance(device, torch.device):
device = select_device(device)
@@ -221,6 +252,7 @@ def fuse_conv_and_bn(conv, bn):
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
+ dilation=conv.dilation,
groups=conv.groups,
bias=True).requires_grad_(False).to(conv.weight.device)
@@ -251,7 +283,7 @@ def model_info(model, verbose=False, imgsz=640):
try: # FLOPs
p = next(model.parameters())
stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
- im = torch.zeros((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
@@ -288,12 +320,13 @@ def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
g = [], [], [] # optimizer parameter groups
bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
for v in model.modules():
- if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
- g[2].append(v.bias)
- if isinstance(v, bn): # weight (no decay)
- g[1].append(v.weight)
- elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
- g[0].append(v.weight)
+ for p_name, p in v.named_parameters(recurse=0):
+ if p_name == 'bias': # bias (no decay)
+ g[2].append(p)
+ elif p_name == 'weight' and isinstance(v, bn): # weight (no decay)
+ g[1].append(p)
+ else:
+ g[0].append(p) # weight (with decay)
if name == 'Adam':
optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
@@ -313,6 +346,18 @@ def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
return optimizer
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
# Resume training from a partially trained checkpoint
best_fitness = 0.0
@@ -365,14 +410,11 @@ class ModelEMA:
def __init__(self, model, decay=0.9999, tau=2000, updates=0):
# Create EMA
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
- # if next(model.parameters()).device.type != 'cpu':
- # self.ema.half() # FP16 EMA
self.updates = updates # number of EMA updates
self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
- @smart_inference_mode()
def update(self, model):
# Update EMA parameters
self.updates += 1
@@ -380,9 +422,10 @@ def update(self, model):
msd = de_parallel(model).state_dict() # model state_dict
for k, v in self.ema.state_dict().items():
- if v.dtype.is_floating_point:
+ if v.dtype.is_floating_point: # true for FP16 and FP32
v *= d
v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
# Update EMA attributes
diff --git a/utils/triton.py b/utils/triton.py
new file mode 100644
index 000000000000..a94ef0ad197d
--- /dev/null
+++ b/utils/triton.py
@@ -0,0 +1,85 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+""" Utils to interact with the Triton Inference Server
+"""
+
+import typing
+from urllib.parse import urlparse
+
+import torch
+
+
+class TritonRemoteModel:
+ """ A wrapper over a model served by the Triton Inference Server. It can
+ be configured to communicate over GRPC or HTTP. It accepts Torch Tensors
+ as input and returns them as outputs.
+ """
+
+ def __init__(self, url: str):
+ """
+ Keyword arguments:
+ url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
+ """
+
+ parsed_url = urlparse(url)
+ if parsed_url.scheme == "grpc":
+ from tritonclient.grpc import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository.models[0].name
+ self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ else:
+ from tritonclient.http import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository[0]['name']
+ self.metadata = self.client.get_model_metadata(self.model_name)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ self._create_input_placeholders_fn = create_input_placeholders
+
+ @property
+ def runtime(self):
+ """Returns the model runtime"""
+ return self.metadata.get("backend", self.metadata.get("platform"))
+
+ def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
+ """ Invokes the model. Parameters can be provided via args or kwargs.
+ args, if provided, are assumed to match the order of inputs of the model.
+ kwargs are matched with the model input names.
+ """
+ inputs = self._create_inputs(*args, **kwargs)
+ response = self.client.infer(model_name=self.model_name, inputs=inputs)
+ result = []
+ for output in self.metadata['outputs']:
+ tensor = torch.as_tensor(response.as_numpy(output['name']))
+ result.append(tensor)
+ return result[0] if len(result) == 1 else result
+
+ def _create_inputs(self, *args, **kwargs):
+ args_len, kwargs_len = len(args), len(kwargs)
+ if not args_len and not kwargs_len:
+ raise RuntimeError("No inputs provided.")
+ if args_len and kwargs_len:
+ raise RuntimeError("Cannot specify args and kwargs at the same time")
+
+ placeholders = self._create_input_placeholders_fn()
+ if args_len:
+ if args_len != len(placeholders):
+ raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
+ for input, value in zip(placeholders, args):
+ input.set_data_from_numpy(value.cpu().numpy())
+ else:
+ for input in placeholders:
+ value = kwargs[input.name]
+ input.set_data_from_numpy(value.cpu().numpy())
+ return placeholders
diff --git a/val.py b/val.py
index 130496233467..8d27d9d3dab1 100644
--- a/val.py
+++ b/val.py
@@ -1,21 +1,22 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Validate a trained YOLOv5 model accuracy on a custom dataset
+Validate a trained YOLOv5 detection model on a detection dataset
Usage:
- $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
- $ python path/to/val.py --weights yolov5s.pt # PyTorch
- yolov5s.torchscript # TorchScript
- yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
- yolov5s.xml # OpenVINO
- yolov5s.engine # TensorRT
- yolov5s.mlmodel # CoreML (macOS-only)
- yolov5s_saved_model # TensorFlow SavedModel
- yolov5s.pb # TensorFlow GraphDef
- yolov5s.tflite # TensorFlow Lite
- yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s_openvino_model # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s_paddle_model # PaddlePaddle
"""
import argparse
@@ -37,12 +38,12 @@
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
-from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_yaml,
- coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
- scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.general import (LOGGER, TQDM_BAR_FORMAT, Profile, check_dataset, check_img_size, check_requirements,
+ check_yaml, coco80_to_coco91_class, colorstr, increment_path, non_max_suppression,
+ print_args, scale_boxes, xywh2xyxy, xyxy2xywh)
from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
-from utils.torch_utils import select_device, smart_inference_mode, time_sync
+from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
@@ -70,12 +71,12 @@ def save_one_json(predn, jdict, path, class_map):
def process_batch(detections, labels, iouv):
"""
- Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Return correct prediction matrix
Arguments:
- detections (Array[N, 6]), x1, y1, x2, y2, conf, class
- labels (Array[M, 5]), class, x1, y1, x2, y2
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
- correct (Array[N, 10]), for 10 IoU levels
+ correct (array[N, 10]), for 10 IoU levels
"""
correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
@@ -101,6 +102,7 @@ def run(
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
task='val', # train, val, test, speed or study
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
@@ -167,8 +169,7 @@ def run(
assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
f'classes). Pass correct combination of --weights and --data that are trained together.'
model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
- pad = 0.0 if task in ('speed', 'benchmark') else 0.5
- rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ pad, rect = (0.0, False) if task == 'speed' else (0.5, pt) # square inference for benchmarks
task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
dataloader = create_dataloader(data[task],
imgsz,
@@ -182,43 +183,49 @@ def run(
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
- names = dict(enumerate(model.names if hasattr(model, 'names') else model.module.names))
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
- s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
- dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ dt = Profile(), Profile(), Profile() # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
callbacks.run('on_val_start')
- pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
callbacks.run('on_val_batch_start')
- t1 = time_sync()
- if cuda:
- im = im.to(device, non_blocking=True)
- targets = targets.to(device)
- im = im.half() if half else im.float() # uint8 to fp16/32
- im /= 255 # 0 - 255 to 0.0 - 1.0
- nb, _, height, width = im.shape # batch size, channels, height, width
- t2 = time_sync()
- dt[0] += t2 - t1
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
- out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
- dt[1] += time_sync() - t2
+ with dt[1]:
+ preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
- loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+ loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
- t3 = time_sync()
- out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
- dt[2] += time_sync() - t3
+ with dt[2]:
+ preds = non_max_suppression(preds,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
# Metrics
- for si, pred in enumerate(out):
+ for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
@@ -236,12 +243,12 @@ def run(
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
- scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+ scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
- scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
@@ -258,9 +265,9 @@ def run(
# Plot images
if plots and batch_i < 3:
plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
- plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+ plot_images(im, output_to_target(preds), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
- callbacks.run('on_val_batch_end')
+ callbacks.run('on_val_batch_end', batch_i, im, targets, paths, shapes, preds)
# Compute metrics
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
@@ -271,10 +278,10 @@ def run(
nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
- pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
if nt.sum() == 0:
- LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+ LOGGER.warning(f'WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels')
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
@@ -282,7 +289,7 @@ def run(
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
- t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
@@ -290,19 +297,19 @@ def run(
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
- callbacks.run('on_val_end')
+ callbacks.run('on_val_end', nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
- anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
- pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ anno_json = str(Path('../datasets/coco/annotations/instances_val2017.json')) # annotations
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions
LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
with open(pred_json, 'w') as f:
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements(['pycocotools'])
+ check_requirements('pycocotools')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -332,11 +339,12 @@ def run(
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
- parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
parser.add_argument('--batch-size', type=int, default=32, help='batch size')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
@@ -361,16 +369,18 @@ def parse_opt():
def main(opt):
- check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
- LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ LOGGER.info(f'WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone')
run(**vars(opt))
else:
weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
- opt.half = True # FP16 for fastest results
+ opt.half = torch.cuda.is_available() and opt.device != 'cpu' # FP16 for fastest results
if opt.task == 'speed': # speed benchmarks
# python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
@@ -389,6 +399,8 @@ def main(opt):
np.savetxt(f, y, fmt='%10.4g') # save
os.system('zip -r study.zip study_*.txt')
plot_val_study(x=x) # plot
+ else:
+ raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
if __name__ == "__main__":
diff --git a/utils/loggers/comet/__init__.py b/utils/loggers/comet/__init__.py
new file mode 100644
index 000000000000..b0318f88d6a6
--- /dev/null
+++ b/utils/loggers/comet/__init__.py
@@ -0,0 +1,508 @@
+import glob
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+try:
+ import comet_ml
+
+ # Project Configuration
+ config = comet_ml.config.get_config()
+ COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+ COMET_PROJECT_NAME = None
+
+import PIL
+import torch
+import torchvision.transforms as T
+import yaml
+
+from utils.dataloaders import img2label_paths
+from utils.general import check_dataset, scale_boxes, xywh2xyxy
+from utils.metrics import box_iou
+
+COMET_PREFIX = "comet://"
+
+COMET_MODE = os.getenv("COMET_MODE", "online")
+
+# Model Saving Settings
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+
+# Dataset Artifact Settings
+COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
+
+# Evaluation Settings
+COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
+COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
+COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
+
+# Confusion Matrix Settings
+CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
+IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
+
+# Batch Logging Settings
+COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
+COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
+COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
+COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
+
+RANK = int(os.getenv("RANK", -1))
+
+to_pil = T.ToPILImage()
+
+
+class CometLogger:
+ """Log metrics, parameters, source code, models and much more
+ with Comet
+ """
+
+ def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
+ self.job_type = job_type
+ self.opt = opt
+ self.hyp = hyp
+
+ # Comet Flags
+ self.comet_mode = COMET_MODE
+
+ self.save_model = opt.save_period > -1
+ self.model_name = COMET_MODEL_NAME
+
+ # Batch Logging Settings
+ self.log_batch_metrics = COMET_LOG_BATCH_METRICS
+ self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
+
+ # Dataset Artifact Settings
+ self.upload_dataset = self.opt.upload_dataset if self.opt.upload_dataset else COMET_UPLOAD_DATASET
+ self.resume = self.opt.resume
+
+ # Default parameters to pass to Experiment objects
+ self.default_experiment_kwargs = {
+ "log_code": False,
+ "log_env_gpu": True,
+ "log_env_cpu": True,
+ "project_name": COMET_PROJECT_NAME,}
+ self.default_experiment_kwargs.update(experiment_kwargs)
+ self.experiment = self._get_experiment(self.comet_mode, run_id)
+
+ self.data_dict = self.check_dataset(self.opt.data)
+ self.class_names = self.data_dict["names"]
+ self.num_classes = self.data_dict["nc"]
+
+ self.logged_images_count = 0
+ self.max_images = COMET_MAX_IMAGE_UPLOADS
+
+ if run_id is None:
+ self.experiment.log_other("Created from", "YOLOv5")
+ if not isinstance(self.experiment, comet_ml.OfflineExperiment):
+ workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
+ self.experiment.log_other(
+ "Run Path",
+ f"{workspace}/{project_name}/{experiment_id}",
+ )
+ self.log_parameters(vars(opt))
+ self.log_parameters(self.opt.hyp)
+ self.log_asset_data(
+ self.opt.hyp,
+ name="hyperparameters.json",
+ metadata={"type": "hyp-config-file"},
+ )
+ self.log_asset(
+ f"{self.opt.save_dir}/opt.yaml",
+ metadata={"type": "opt-config-file"},
+ )
+
+ self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
+
+ if hasattr(self.opt, "conf_thres"):
+ self.conf_thres = self.opt.conf_thres
+ else:
+ self.conf_thres = CONF_THRES
+ if hasattr(self.opt, "iou_thres"):
+ self.iou_thres = self.opt.iou_thres
+ else:
+ self.iou_thres = IOU_THRES
+
+ self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
+
+ self.comet_log_predictions = COMET_LOG_PREDICTIONS
+ if self.opt.bbox_interval == -1:
+ self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
+ else:
+ self.comet_log_prediction_interval = self.opt.bbox_interval
+
+ if self.comet_log_predictions:
+ self.metadata_dict = {}
+ self.logged_image_names = []
+
+ self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
+
+ self.experiment.log_others({
+ "comet_mode": COMET_MODE,
+ "comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
+ "comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
+ "comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
+ "comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
+ "comet_model_name": COMET_MODEL_NAME,})
+
+ # Check if running the Experiment with the Comet Optimizer
+ if hasattr(self.opt, "comet_optimizer_id"):
+ self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
+ self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
+ self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
+ self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
+
+ def _get_experiment(self, mode, experiment_id=None):
+ if mode == "offline":
+ if experiment_id is not None:
+ return comet_ml.ExistingOfflineExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.OfflineExperiment(**self.default_experiment_kwargs,)
+
+ else:
+ try:
+ if experiment_id is not None:
+ return comet_ml.ExistingExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.Experiment(**self.default_experiment_kwargs)
+
+ except ValueError:
+ logger.warning("COMET WARNING: "
+ "Comet credentials have not been set. "
+ "Comet will default to offline logging. "
+ "Please set your credentials to enable online logging.")
+ return self._get_experiment("offline", experiment_id)
+
+ return
+
+ def log_metrics(self, log_dict, **kwargs):
+ self.experiment.log_metrics(log_dict, **kwargs)
+
+ def log_parameters(self, log_dict, **kwargs):
+ self.experiment.log_parameters(log_dict, **kwargs)
+
+ def log_asset(self, asset_path, **kwargs):
+ self.experiment.log_asset(asset_path, **kwargs)
+
+ def log_asset_data(self, asset, **kwargs):
+ self.experiment.log_asset_data(asset, **kwargs)
+
+ def log_image(self, img, **kwargs):
+ self.experiment.log_image(img, **kwargs)
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ if not self.save_model:
+ return
+
+ model_metadata = {
+ "fitness_score": fitness_score[-1],
+ "epochs_trained": epoch + 1,
+ "save_period": opt.save_period,
+ "total_epochs": opt.epochs,}
+
+ model_files = glob.glob(f"{path}/*.pt")
+ for model_path in model_files:
+ name = Path(model_path).name
+
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ metadata=model_metadata,
+ overwrite=True,
+ )
+
+ def check_dataset(self, data_file):
+ with open(data_file) as f:
+ data_config = yaml.safe_load(f)
+
+ if data_config['path'].startswith(COMET_PREFIX):
+ path = data_config['path'].replace(COMET_PREFIX, "")
+ data_dict = self.download_dataset_artifact(path)
+
+ return data_dict
+
+ self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
+
+ return check_dataset(data_file)
+
+ def log_predictions(self, image, labelsn, path, shape, predn):
+ if self.logged_images_count >= self.max_images:
+ return
+ detections = predn[predn[:, 4] > self.conf_thres]
+ iou = box_iou(labelsn[:, 1:], detections[:, :4])
+ mask, _ = torch.where(iou > self.iou_thres)
+ if len(mask) == 0:
+ return
+
+ filtered_detections = detections[mask]
+ filtered_labels = labelsn[mask]
+
+ image_id = path.split("/")[-1].split(".")[0]
+ image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
+ if image_name not in self.logged_image_names:
+ native_scale_image = PIL.Image.open(path)
+ self.log_image(native_scale_image, name=image_name)
+ self.logged_image_names.append(image_name)
+
+ metadata = []
+ for cls, *xyxy in filtered_labels.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}-gt",
+ "score": 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+ for *xyxy, conf, cls in filtered_detections.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}",
+ "score": conf * 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+
+ self.metadata_dict[image_name] = metadata
+ self.logged_images_count += 1
+
+ return
+
+ def preprocess_prediction(self, image, labels, shape, pred):
+ nl, _ = labels.shape[0], pred.shape[0]
+
+ # Predictions
+ if self.opt.single_cls:
+ pred[:, 5] = 0
+
+ predn = pred.clone()
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
+
+ labelsn = None
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
+
+ return predn, labelsn
+
+ def add_assets_to_artifact(self, artifact, path, asset_path, split):
+ img_paths = sorted(glob.glob(f"{asset_path}/*"))
+ label_paths = img2label_paths(img_paths)
+
+ for image_file, label_file in zip(img_paths, label_paths):
+ image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
+
+ try:
+ artifact.add(image_file, logical_path=image_logical_path, metadata={"split": split})
+ artifact.add(label_file, logical_path=label_logical_path, metadata={"split": split})
+ except ValueError as e:
+ logger.error('COMET ERROR: Error adding file to Artifact. Skipping file.')
+ logger.error(f"COMET ERROR: {e}")
+ continue
+
+ return artifact
+
+ def upload_dataset_artifact(self):
+ dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
+ path = str((ROOT / Path(self.data_dict["path"])).resolve())
+
+ metadata = self.data_dict.copy()
+ for key in ["train", "val", "test"]:
+ split_path = metadata.get(key)
+ if split_path is not None:
+ metadata[key] = split_path.replace(path, "")
+
+ artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
+ for key in metadata.keys():
+ if key in ["train", "val", "test"]:
+ if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
+ continue
+
+ asset_path = self.data_dict.get(key)
+ if asset_path is not None:
+ artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
+
+ self.experiment.log_artifact(artifact)
+
+ return
+
+ def download_dataset_artifact(self, artifact_path):
+ logged_artifact = self.experiment.get_artifact(artifact_path)
+ artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
+ logged_artifact.download(artifact_save_dir)
+
+ metadata = logged_artifact.metadata
+ data_dict = metadata.copy()
+ data_dict["path"] = artifact_save_dir
+
+ metadata_names = metadata.get("names")
+ if type(metadata_names) == dict:
+ data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
+ elif type(metadata_names) == list:
+ data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
+ else:
+ raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
+
+ data_dict = self.update_data_paths(data_dict)
+ return data_dict
+
+ def update_data_paths(self, data_dict):
+ path = data_dict.get("path", "")
+
+ for split in ["train", "val", "test"]:
+ if data_dict.get(split):
+ split_path = data_dict.get(split)
+ data_dict[split] = (f"{path}/{split_path}" if isinstance(split, str) else [
+ f"{path}/{x}" for x in split_path])
+
+ return data_dict
+
+ def on_pretrain_routine_end(self, paths):
+ if self.opt.resume:
+ return
+
+ for path in paths:
+ self.log_asset(str(path))
+
+ if self.upload_dataset:
+ if not self.resume:
+ self.upload_dataset_artifact()
+
+ return
+
+ def on_train_start(self):
+ self.log_parameters(self.hyp)
+
+ def on_train_epoch_start(self):
+ return
+
+ def on_train_epoch_end(self, epoch):
+ self.experiment.curr_epoch = epoch
+
+ return
+
+ def on_train_batch_start(self):
+ return
+
+ def on_train_batch_end(self, log_dict, step):
+ self.experiment.curr_step = step
+ if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
+ self.log_metrics(log_dict, step=step)
+
+ return
+
+ def on_train_end(self, files, save_dir, last, best, epoch, results):
+ if self.comet_log_predictions:
+ curr_epoch = self.experiment.curr_epoch
+ self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
+
+ for f in files:
+ self.log_asset(f, metadata={"epoch": epoch})
+ self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
+
+ if not self.opt.evolve:
+ model_path = str(best if best.exists() else last)
+ name = Path(model_path).name
+ if self.save_model:
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ overwrite=True,
+ )
+
+ # Check if running Experiment with Comet Optimizer
+ if hasattr(self.opt, 'comet_optimizer_id'):
+ metric = results.get(self.opt.comet_optimizer_metric)
+ self.experiment.log_other('optimizer_metric_value', metric)
+
+ self.finish_run()
+
+ def on_val_start(self):
+ return
+
+ def on_val_batch_start(self):
+ return
+
+ def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
+ if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
+ return
+
+ for si, pred in enumerate(outputs):
+ if len(pred) == 0:
+ continue
+
+ image = images[si]
+ labels = targets[targets[:, 0] == si, 1:]
+ shape = shapes[si]
+ path = paths[si]
+ predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
+ if labelsn is not None:
+ self.log_predictions(image, labelsn, path, shape, predn)
+
+ return
+
+ def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
+ if self.comet_log_per_class_metrics:
+ if self.num_classes > 1:
+ for i, c in enumerate(ap_class):
+ class_name = self.class_names[c]
+ self.experiment.log_metrics(
+ {
+ 'mAP@.5': ap50[i],
+ 'mAP@.5:.95': ap[i],
+ 'precision': p[i],
+ 'recall': r[i],
+ 'f1': f1[i],
+ 'true_positives': tp[i],
+ 'false_positives': fp[i],
+ 'support': nt[c]},
+ prefix=class_name)
+
+ if self.comet_log_confusion_matrix:
+ epoch = self.experiment.curr_epoch
+ class_names = list(self.class_names.values())
+ class_names.append("background")
+ num_classes = len(class_names)
+
+ self.experiment.log_confusion_matrix(
+ matrix=confusion_matrix.matrix,
+ max_categories=num_classes,
+ labels=class_names,
+ epoch=epoch,
+ column_label='Actual Category',
+ row_label='Predicted Category',
+ file_name=f"confusion-matrix-epoch-{epoch}.json",
+ )
+
+ def on_fit_epoch_end(self, result, epoch):
+ self.log_metrics(result, epoch=epoch)
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ def on_params_update(self, params):
+ self.log_parameters(params)
+
+ def finish_run(self):
+ self.experiment.end()
diff --git a/utils/loggers/comet/comet_utils.py b/utils/loggers/comet/comet_utils.py
new file mode 100644
index 000000000000..3cbd45156b57
--- /dev/null
+++ b/utils/loggers/comet/comet_utils.py
@@ -0,0 +1,150 @@
+import logging
+import os
+from urllib.parse import urlparse
+
+try:
+ import comet_ml
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+
+import yaml
+
+logger = logging.getLogger(__name__)
+
+COMET_PREFIX = "comet://"
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
+
+
+def download_model_checkpoint(opt, experiment):
+ model_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(model_dir, exist_ok=True)
+
+ model_name = COMET_MODEL_NAME
+ model_asset_list = experiment.get_model_asset_list(model_name)
+
+ if len(model_asset_list) == 0:
+ logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
+ return
+
+ model_asset_list = sorted(
+ model_asset_list,
+ key=lambda x: x["step"],
+ reverse=True,
+ )
+ logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
+
+ resource_url = urlparse(opt.weights)
+ checkpoint_filename = resource_url.query
+
+ if checkpoint_filename:
+ asset_id = logged_checkpoint_map.get(checkpoint_filename)
+ else:
+ asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
+ checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
+
+ if asset_id is None:
+ logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
+ return
+
+ try:
+ logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
+ asset_filename = checkpoint_filename
+
+ model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ model_download_path = f"{model_dir}/{asset_filename}"
+ with open(model_download_path, "wb") as f:
+ f.write(model_binary)
+
+ opt.weights = model_download_path
+
+ except Exception as e:
+ logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
+ logger.exception(e)
+
+
+def set_opt_parameters(opt, experiment):
+ """Update the opts Namespace with parameters
+ from Comet's ExistingExperiment when resuming a run
+
+ Args:
+ opt (argparse.Namespace): Namespace of command line options
+ experiment (comet_ml.APIExperiment): Comet API Experiment object
+ """
+ asset_list = experiment.get_asset_list()
+ resume_string = opt.resume
+
+ for asset in asset_list:
+ if asset["fileName"] == "opt.yaml":
+ asset_id = asset["assetId"]
+ asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ opt_dict = yaml.safe_load(asset_binary)
+ for key, value in opt_dict.items():
+ setattr(opt, key, value)
+ opt.resume = resume_string
+
+ # Save hyperparameters to YAML file
+ # Necessary to pass checks in training script
+ save_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(save_dir, exist_ok=True)
+
+ hyp_yaml_path = f"{save_dir}/hyp.yaml"
+ with open(hyp_yaml_path, "w") as f:
+ yaml.dump(opt.hyp, f)
+ opt.hyp = hyp_yaml_path
+
+
+def check_comet_weights(opt):
+ """Downloads model weights from Comet and updates the
+ weights path to point to saved weights location
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if weights are successfully downloaded
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.weights, str):
+ if opt.weights.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.weights)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ download_model_checkpoint(opt, experiment)
+ return True
+
+ return None
+
+
+def check_comet_resume(opt):
+ """Restores run parameters to its original state based on the model checkpoint
+ and logged Experiment parameters.
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if the run is restored successfully
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.resume)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ set_opt_parameters(opt, experiment)
+ download_model_checkpoint(opt, experiment)
+
+ return True
+
+ return None
diff --git a/utils/loggers/comet/hpo.py b/utils/loggers/comet/hpo.py
new file mode 100644
index 000000000000..7dd5c92e8de1
--- /dev/null
+++ b/utils/loggers/comet/hpo.py
@@ -0,0 +1,118 @@
+import argparse
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+import comet_ml
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+# Project Configuration
+config = comet_ml.config.get_config()
+COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+
+
+def get_args(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ # Comet Arguments
+ parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
+ parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
+ parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
+ parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
+ parser.add_argument("--comet_optimizer_workers",
+ type=int,
+ default=1,
+ help="Comet: Number of Parallel Workers to use with the Comet Optimizer.")
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def run(parameters, opt):
+ hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
+
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.batch_size = parameters.get("batch_size")
+ opt.epochs = parameters.get("epochs")
+
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ opt = get_args(known=True)
+
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.project = str(opt.project)
+
+ optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
+ if optimizer_id is None:
+ with open(opt.comet_optimizer_config) as f:
+ optimizer_config = json.load(f)
+ optimizer = comet_ml.Optimizer(optimizer_config)
+ else:
+ optimizer = comet_ml.Optimizer(optimizer_id)
+
+ opt.comet_optimizer_id = optimizer.id
+ status = optimizer.status()
+
+ opt.comet_optimizer_objective = status["spec"]["objective"]
+ opt.comet_optimizer_metric = status["spec"]["metric"]
+
+ logger.info("COMET INFO: Starting Hyperparameter Sweep")
+ for parameter in optimizer.get_parameters():
+ run(parameter["parameters"], opt)
diff --git a/utils/loggers/comet/optimizer_config.json b/utils/loggers/comet/optimizer_config.json
new file mode 100644
index 000000000000..83ddddab6f20
--- /dev/null
+++ b/utils/loggers/comet/optimizer_config.json
@@ -0,0 +1,209 @@
+{
+ "algorithm": "random",
+ "parameters": {
+ "anchor_t": {
+ "type": "discrete",
+ "values": [
+ 2,
+ 8
+ ]
+ },
+ "batch_size": {
+ "type": "discrete",
+ "values": [
+ 16,
+ 32,
+ 64
+ ]
+ },
+ "box": {
+ "type": "discrete",
+ "values": [
+ 0.02,
+ 0.2
+ ]
+ },
+ "cls": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "cls_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "copy_paste": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "degrees": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 45
+ ]
+ },
+ "epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "fl_gamma": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "fliplr": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "flipud": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_h": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_s": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_v": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "iou_t": {
+ "type": "discrete",
+ "values": [
+ 0.7
+ ]
+ },
+ "lr0": {
+ "type": "discrete",
+ "values": [
+ 1e-05,
+ 0.1
+ ]
+ },
+ "lrf": {
+ "type": "discrete",
+ "values": [
+ 0.01,
+ 1
+ ]
+ },
+ "mixup": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "momentum": {
+ "type": "discrete",
+ "values": [
+ 0.6
+ ]
+ },
+ "mosaic": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "obj": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "obj_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "optimizer": {
+ "type": "categorical",
+ "values": [
+ "SGD",
+ "Adam",
+ "AdamW"
+ ]
+ },
+ "perspective": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "scale": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "shear": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "translate": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "warmup_bias_lr": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.2
+ ]
+ },
+ "warmup_epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "warmup_momentum": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.95
+ ]
+ },
+ "weight_decay": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.001
+ ]
+ }
+ },
+ "spec": {
+ "maxCombo": 0,
+ "metric": "metrics/mAP_0.5",
+ "objective": "maximize"
+ },
+ "trials": 1
+}
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
index e850d2ac8a7c..238f4edbf2a0 100644
--- a/utils/loggers/wandb/wandb_utils.py
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -132,6 +132,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
job_type (str) -- To set the job_type for this run
"""
+ # Temporary-fix
+ if opt.upload_dataset:
+ opt.upload_dataset = False
+ # LOGGER.info("Uploading Dataset functionality is not being supported temporarily due to a bug.")
+
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
diff --git a/utils/metrics.py b/utils/metrics.py
index 08880cd3f212..c01f823a77a1 100644
--- a/utils/metrics.py
+++ b/utils/metrics.py
@@ -11,6 +11,8 @@
import numpy as np
import torch
+from utils import TryExcept, threaded
+
def fitness(x):
# Model fitness as a weighted combination of metrics
@@ -26,7 +28,7 @@ def smooth(y, f=0.05):
return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
-def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
@@ -81,10 +83,10 @@ def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
names = dict(enumerate(names)) # to dict
if plot:
- plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
- plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
- plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
- plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
@@ -141,7 +143,7 @@ def process_batch(self, detections, labels):
"""
if detections is None:
gt_classes = labels.int()
- for i, gc in enumerate(gt_classes):
+ for gc in gt_classes:
self.matrix[self.nc, gc] += 1 # background FN
return
@@ -168,15 +170,12 @@ def process_batch(self, detections, labels):
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
- self.matrix[self.nc, gc] += 1 # background FP
+ self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
- self.matrix[dc, self.nc] += 1 # background FN
-
- def matrix(self):
- return self.matrix
+ self.matrix[dc, self.nc] += 1 # predicted background
def tp_fp(self):
tp = self.matrix.diagonal() # true positives
@@ -184,36 +183,36 @@ def tp_fp(self):
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
+ @TryExcept('WARNING ⚠️ ConfusionMatrix plot failure')
def plot(self, normalize=True, save_dir='', names=()):
- try:
- import seaborn as sn
-
- array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
- array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
-
- fig = plt.figure(figsize=(12, 9), tight_layout=True)
- nc, nn = self.nc, len(names) # number of classes, names
- sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
- labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
- with warnings.catch_warnings():
- warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
- sn.heatmap(array,
- annot=nc < 30,
- annot_kws={
- "size": 8},
- cmap='Blues',
- fmt='.2f',
- square=True,
- vmin=0.0,
- xticklabels=names + ['background FP'] if labels else "auto",
- yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
- fig.axes[0].set_xlabel('True')
- fig.axes[0].set_ylabel('Predicted')
- plt.title('Confusion Matrix')
- fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
- plt.close()
- except Exception as e:
- print(f'WARNING: ConfusionMatrix plot failure: {e}')
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ ticklabels = (names + ['background']) if labels else "auto"
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=ticklabels,
+ yticklabels=ticklabels).set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
def print(self):
for i in range(self.nc + 1):
@@ -225,19 +224,19 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
- (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
- b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
- b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
- w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
- w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
+ w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
+ w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
- inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
- (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+ inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
+ (b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
@@ -245,13 +244,13 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
- cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
- ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
+ ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
- v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
@@ -261,11 +260,6 @@ def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7
return iou # IoU
-def box_area(box):
- # box = xyxy(4,n)
- return (box[2] - box[0]) * (box[3] - box[1])
-
-
def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
@@ -280,11 +274,11 @@ def box_iou(box1, box2, eps=1e-7):
"""
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
- (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ (a1, a2), (b1, b2) = box1.unsqueeze(1).chunk(2, 2), box2.unsqueeze(0).chunk(2, 2)
inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
# IoU = inter / (area1 + area2 - inter)
- return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+ return inter / ((a2 - a1).prod(2) + (b2 - b1).prod(2) - inter + eps)
def bbox_ioa(box1, box2, eps=1e-7):
@@ -320,6 +314,7 @@ def wh_iou(wh1, wh2, eps=1e-7):
# Plots ----------------------------------------------------------------------------------------------------------------
+@threaded
def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
# Precision-recall curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -336,12 +331,13 @@ def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
ax.set_ylabel('Precision')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- plt.title('Precision-Recall Curve')
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
fig.savefig(save_dir, dpi=250)
- plt.close()
+ plt.close(fig)
+@threaded
def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
# Metric-confidence curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -358,7 +354,7 @@ def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confi
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- plt.title(f'{ylabel}-Confidence Curve')
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
fig.savefig(save_dir, dpi=250)
- plt.close()
+ plt.close(fig)
diff --git a/utils/plots.py b/utils/plots.py
index d050f5d36aba..d2f232de0e97 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -3,6 +3,7 @@
Plotting utils
"""
+import contextlib
import math
import os
from copy import copy
@@ -18,9 +19,11 @@
import torch
from PIL import Image, ImageDraw, ImageFont
-from utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,
- increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_boxes, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
from utils.metrics import fitness
+from utils.segment.general import scale_image
# Settings
RANK = int(os.getenv('RANK', -1))
@@ -111,14 +114,51 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
thickness=tf,
lineType=cv2.LINE_AA)
+ def masks(self, masks, colors, im_gpu, alpha=0.5, retina_masks=False):
+ """Plot masks at once.
+ Args:
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ im_gpu (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ alpha (float): mask transparency: 0.0 fully transparent, 1.0 opaque
+ """
+ if self.pil:
+ # convert to numpy first
+ self.im = np.asarray(self.im).copy()
+ if len(masks) == 0:
+ self.im[:] = im_gpu.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+ colors = torch.tensor(colors, device=im_gpu.device, dtype=torch.float32) / 255.0
+ colors = colors[:, None, None] # shape(n,1,1,3)
+ masks = masks.unsqueeze(3) # shape(n,h,w,1)
+ masks_color = masks * (colors * alpha) # shape(n,h,w,3)
+
+ inv_alph_masks = (1 - masks * alpha).cumprod(0) # shape(n,h,w,1)
+ mcs = (masks_color * inv_alph_masks).sum(0) * 2 # mask color summand shape(n,h,w,3)
+
+ im_gpu = im_gpu.flip(dims=[0]) # flip channel
+ im_gpu = im_gpu.permute(1, 2, 0).contiguous() # shape(h,w,3)
+ im_gpu = im_gpu * inv_alph_masks[-1] + mcs
+ im_mask = (im_gpu * 255).byte().cpu().numpy()
+ self.im[:] = im_mask if retina_masks else scale_image(im_gpu.shape, im_mask, self.im.shape)
+ if self.pil:
+ # convert im back to PIL and update draw
+ self.fromarray(self.im)
+
def rectangle(self, xy, fill=None, outline=None, width=1):
# Add rectangle to image (PIL-only)
self.draw.rectangle(xy, fill, outline, width)
- def text(self, xy, text, txt_color=(255, 255, 255)):
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
# Add text to image (PIL-only)
- w, h = self.font.getsize(text) # text width, height
- self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
def result(self):
# Return annotated image as array
@@ -148,7 +188,6 @@ def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detec
ax[i].axis('off')
LOGGER.info(f'Saving {f}... ({n}/{channels})')
- plt.title('Features')
plt.savefig(f, dpi=300, bbox_inches='tight')
plt.close()
np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
@@ -176,27 +215,31 @@ def butter_lowpass(cutoff, fs, order):
return filtfilt(b, a, data) # forward-backward filter
-def output_to_target(output):
- # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
targets = []
for i, o in enumerate(output):
- for *box, conf, cls in o.cpu().numpy():
- targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
- return np.array(targets)
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
@threaded
-def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
# Plot image grid with labels
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
- if np.max(images[0]) <= 1:
- images *= 255 # de-normalise (optional)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
@@ -221,7 +264,7 @@ def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
- annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
@@ -339,8 +382,7 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
plt.savefig(f, dpi=300)
-@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
-@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path('')):
# plot dataset labels
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
@@ -357,14 +399,12 @@ def plot_labels(labels, names=(), save_dir=Path('')):
matplotlib.use('svg') # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
- try: # color histogram bars by class
+ with contextlib.suppress(Exception): # color histogram bars by class
[y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
- except Exception:
- pass
ax[0].set_ylabel('instances')
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
- ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel('classes')
sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
@@ -388,6 +428,35 @@ def plot_labels(labels, names=(), save_dir=Path('')):
plt.close()
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
# Plot evolve.csv hyp evolution results
evolve_csv = Path(evolve_csv)
@@ -480,7 +549,7 @@ def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False,
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
- clip_coords(xyxy, im.shape)
+ clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
diff --git a/utils/segment/__init__.py b/utils/segment/__init__.py
new file mode 100644
index 000000000000..e69de29bb2d1
diff --git a/utils/segment/augmentations.py b/utils/segment/augmentations.py
new file mode 100644
index 000000000000..169addedf0f5
--- /dev/null
+++ b/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/utils/segment/dataloaders.py b/utils/segment/dataloaders.py
new file mode 100644
index 000000000000..d66b36115e3f
--- /dev/null
+++ b/utils/segment/dataloaders.py
@@ -0,0 +1,332 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+RANK = int(os.getenv('RANK', -1))
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False,
+ seed=0):
+ if rect and shuffle:
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + seed + RANK)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ min_items=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, min_items, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/utils/segment/general.py b/utils/segment/general.py
new file mode 100644
index 000000000000..9da894538665
--- /dev/null
+++ b/utils/segment/general.py
@@ -0,0 +1,160 @@
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+
+
+def crop_mask(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ protos: [mask_dim, mask_h, mask_w]
+ masks_in: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape: input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop_mask(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask_native(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ protos: [mask_dim, mask_h, mask_w]
+ masks_in: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape: input_image_size, (h, w)
+
+ return: h, w, n
+ """
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ gain = min(mh / shape[0], mw / shape[1]) # gain = old / new
+ pad = (mw - shape[1] * gain) / 2, (mh - shape[0] * gain) / 2 # wh padding
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(mh - pad[1]), int(mw - pad[0])
+ masks = masks[:, top:bottom, left:right]
+
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ """
+ # Rescale coordinates (xyxy) from im1_shape to im0_shape
+ if ratio_pad is None: # calculate from im0_shape
+ gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
+ pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
+ else:
+ pad = ratio_pad[1]
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ masks = masks[top:bottom, left:right]
+ # masks = masks.permute(2, 0, 1).contiguous()
+ # masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
+
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks2segments(masks, strategy='largest'):
+ # Convert masks(n,160,160) into segments(n,xy)
+ segments = []
+ for x in masks.int().cpu().numpy().astype('uint8'):
+ c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
+ if c:
+ if strategy == 'concat': # concatenate all segments
+ c = np.concatenate([x.reshape(-1, 2) for x in c])
+ elif strategy == 'largest': # select largest segment
+ c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
+ else:
+ c = np.zeros((0, 2)) # no segments found
+ segments.append(c.astype('float32'))
+ return segments
diff --git a/utils/segment/loss.py b/utils/segment/loss.py
new file mode 100644
index 000000000000..b45b2c27e0a0
--- /dev/null
+++ b/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop_mask
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/utils/segment/metrics.py b/utils/segment/metrics.py
new file mode 100644
index 000000000000..b09ce23fb9e3
--- /dev/null
+++ b/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/utils/segment/plots.py b/utils/segment/plots.py
new file mode 100644
index 000000000000..9b90900b3772
--- /dev/null
+++ b/utils/segment/plots.py
@@ -0,0 +1,143 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(bool)
+ else:
+ mask = image_masks[j].astype(bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11])
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 1ceb0aa346e9..77549b005ceb 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -32,6 +32,7 @@
# Suppress PyTorch warnings
warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+warnings.filterwarnings('ignore', category=UserWarning)
def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
@@ -42,6 +43,15 @@ def decorate(fn):
return decorate
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
def smart_DDP(model):
# Model DDP creation with checks
assert not check_version(torch.__version__, '1.12.0', pinned=True), \
@@ -53,6 +63,28 @@ def smart_DDP(model):
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias is not None)
+
+
@contextmanager
def torch_distributed_zero_first(local_rank: int):
# Decorator to make all processes in distributed training wait for each local_master to do something
@@ -86,7 +118,7 @@ def select_device(device='', batch_size=0, newline=True):
assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
- if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
@@ -117,14 +149,13 @@ def time_sync():
def profile(input, ops, n=10, device=None):
- # YOLOv5 speed/memory/FLOPs profiler
- #
- # Usage:
- # input = torch.randn(16, 3, 640, 640)
- # m1 = lambda x: x * torch.sigmoid(x)
- # m2 = nn.SiLU()
- # profile(input, [m1, m2], n=100) # profile over 100 iterations
-
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
results = []
if not isinstance(device, torch.device):
device = select_device(device)
@@ -221,6 +252,7 @@ def fuse_conv_and_bn(conv, bn):
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
+ dilation=conv.dilation,
groups=conv.groups,
bias=True).requires_grad_(False).to(conv.weight.device)
@@ -251,7 +283,7 @@ def model_info(model, verbose=False, imgsz=640):
try: # FLOPs
p = next(model.parameters())
stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
- im = torch.zeros((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
@@ -288,12 +320,13 @@ def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
g = [], [], [] # optimizer parameter groups
bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
for v in model.modules():
- if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
- g[2].append(v.bias)
- if isinstance(v, bn): # weight (no decay)
- g[1].append(v.weight)
- elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
- g[0].append(v.weight)
+ for p_name, p in v.named_parameters(recurse=0):
+ if p_name == 'bias': # bias (no decay)
+ g[2].append(p)
+ elif p_name == 'weight' and isinstance(v, bn): # weight (no decay)
+ g[1].append(p)
+ else:
+ g[0].append(p) # weight (with decay)
if name == 'Adam':
optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
@@ -313,6 +346,18 @@ def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
return optimizer
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
# Resume training from a partially trained checkpoint
best_fitness = 0.0
@@ -365,14 +410,11 @@ class ModelEMA:
def __init__(self, model, decay=0.9999, tau=2000, updates=0):
# Create EMA
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
- # if next(model.parameters()).device.type != 'cpu':
- # self.ema.half() # FP16 EMA
self.updates = updates # number of EMA updates
self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
- @smart_inference_mode()
def update(self, model):
# Update EMA parameters
self.updates += 1
@@ -380,9 +422,10 @@ def update(self, model):
msd = de_parallel(model).state_dict() # model state_dict
for k, v in self.ema.state_dict().items():
- if v.dtype.is_floating_point:
+ if v.dtype.is_floating_point: # true for FP16 and FP32
v *= d
v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
# Update EMA attributes
diff --git a/utils/triton.py b/utils/triton.py
new file mode 100644
index 000000000000..a94ef0ad197d
--- /dev/null
+++ b/utils/triton.py
@@ -0,0 +1,85 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+""" Utils to interact with the Triton Inference Server
+"""
+
+import typing
+from urllib.parse import urlparse
+
+import torch
+
+
+class TritonRemoteModel:
+ """ A wrapper over a model served by the Triton Inference Server. It can
+ be configured to communicate over GRPC or HTTP. It accepts Torch Tensors
+ as input and returns them as outputs.
+ """
+
+ def __init__(self, url: str):
+ """
+ Keyword arguments:
+ url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
+ """
+
+ parsed_url = urlparse(url)
+ if parsed_url.scheme == "grpc":
+ from tritonclient.grpc import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository.models[0].name
+ self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ else:
+ from tritonclient.http import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository[0]['name']
+ self.metadata = self.client.get_model_metadata(self.model_name)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ self._create_input_placeholders_fn = create_input_placeholders
+
+ @property
+ def runtime(self):
+ """Returns the model runtime"""
+ return self.metadata.get("backend", self.metadata.get("platform"))
+
+ def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
+ """ Invokes the model. Parameters can be provided via args or kwargs.
+ args, if provided, are assumed to match the order of inputs of the model.
+ kwargs are matched with the model input names.
+ """
+ inputs = self._create_inputs(*args, **kwargs)
+ response = self.client.infer(model_name=self.model_name, inputs=inputs)
+ result = []
+ for output in self.metadata['outputs']:
+ tensor = torch.as_tensor(response.as_numpy(output['name']))
+ result.append(tensor)
+ return result[0] if len(result) == 1 else result
+
+ def _create_inputs(self, *args, **kwargs):
+ args_len, kwargs_len = len(args), len(kwargs)
+ if not args_len and not kwargs_len:
+ raise RuntimeError("No inputs provided.")
+ if args_len and kwargs_len:
+ raise RuntimeError("Cannot specify args and kwargs at the same time")
+
+ placeholders = self._create_input_placeholders_fn()
+ if args_len:
+ if args_len != len(placeholders):
+ raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
+ for input, value in zip(placeholders, args):
+ input.set_data_from_numpy(value.cpu().numpy())
+ else:
+ for input in placeholders:
+ value = kwargs[input.name]
+ input.set_data_from_numpy(value.cpu().numpy())
+ return placeholders
diff --git a/val.py b/val.py
index 130496233467..8d27d9d3dab1 100644
--- a/val.py
+++ b/val.py
@@ -1,21 +1,22 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Validate a trained YOLOv5 model accuracy on a custom dataset
+Validate a trained YOLOv5 detection model on a detection dataset
Usage:
- $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
- $ python path/to/val.py --weights yolov5s.pt # PyTorch
- yolov5s.torchscript # TorchScript
- yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
- yolov5s.xml # OpenVINO
- yolov5s.engine # TensorRT
- yolov5s.mlmodel # CoreML (macOS-only)
- yolov5s_saved_model # TensorFlow SavedModel
- yolov5s.pb # TensorFlow GraphDef
- yolov5s.tflite # TensorFlow Lite
- yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s_openvino_model # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s_paddle_model # PaddlePaddle
"""
import argparse
@@ -37,12 +38,12 @@
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
-from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_yaml,
- coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
- scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.general import (LOGGER, TQDM_BAR_FORMAT, Profile, check_dataset, check_img_size, check_requirements,
+ check_yaml, coco80_to_coco91_class, colorstr, increment_path, non_max_suppression,
+ print_args, scale_boxes, xywh2xyxy, xyxy2xywh)
from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
-from utils.torch_utils import select_device, smart_inference_mode, time_sync
+from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
@@ -70,12 +71,12 @@ def save_one_json(predn, jdict, path, class_map):
def process_batch(detections, labels, iouv):
"""
- Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Return correct prediction matrix
Arguments:
- detections (Array[N, 6]), x1, y1, x2, y2, conf, class
- labels (Array[M, 5]), class, x1, y1, x2, y2
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
- correct (Array[N, 10]), for 10 IoU levels
+ correct (array[N, 10]), for 10 IoU levels
"""
correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
@@ -101,6 +102,7 @@ def run(
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
task='val', # train, val, test, speed or study
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
@@ -167,8 +169,7 @@ def run(
assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
f'classes). Pass correct combination of --weights and --data that are trained together.'
model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
- pad = 0.0 if task in ('speed', 'benchmark') else 0.5
- rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ pad, rect = (0.0, False) if task == 'speed' else (0.5, pt) # square inference for benchmarks
task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
dataloader = create_dataloader(data[task],
imgsz,
@@ -182,43 +183,49 @@ def run(
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
- names = dict(enumerate(model.names if hasattr(model, 'names') else model.module.names))
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
- s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
- dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ dt = Profile(), Profile(), Profile() # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
callbacks.run('on_val_start')
- pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
callbacks.run('on_val_batch_start')
- t1 = time_sync()
- if cuda:
- im = im.to(device, non_blocking=True)
- targets = targets.to(device)
- im = im.half() if half else im.float() # uint8 to fp16/32
- im /= 255 # 0 - 255 to 0.0 - 1.0
- nb, _, height, width = im.shape # batch size, channels, height, width
- t2 = time_sync()
- dt[0] += t2 - t1
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
- out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
- dt[1] += time_sync() - t2
+ with dt[1]:
+ preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
- loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+ loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
- t3 = time_sync()
- out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
- dt[2] += time_sync() - t3
+ with dt[2]:
+ preds = non_max_suppression(preds,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
# Metrics
- for si, pred in enumerate(out):
+ for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
@@ -236,12 +243,12 @@ def run(
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
- scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+ scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
- scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
@@ -258,9 +265,9 @@ def run(
# Plot images
if plots and batch_i < 3:
plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
- plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+ plot_images(im, output_to_target(preds), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
- callbacks.run('on_val_batch_end')
+ callbacks.run('on_val_batch_end', batch_i, im, targets, paths, shapes, preds)
# Compute metrics
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
@@ -271,10 +278,10 @@ def run(
nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
- pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
if nt.sum() == 0:
- LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+ LOGGER.warning(f'WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels')
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
@@ -282,7 +289,7 @@ def run(
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
- t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
@@ -290,19 +297,19 @@ def run(
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
- callbacks.run('on_val_end')
+ callbacks.run('on_val_end', nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
- anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
- pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ anno_json = str(Path('../datasets/coco/annotations/instances_val2017.json')) # annotations
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions
LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
with open(pred_json, 'w') as f:
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements(['pycocotools'])
+ check_requirements('pycocotools')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -332,11 +339,12 @@ def run(
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
- parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
parser.add_argument('--batch-size', type=int, default=32, help='batch size')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
@@ -361,16 +369,18 @@ def parse_opt():
def main(opt):
- check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
- LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ LOGGER.info(f'WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone')
run(**vars(opt))
else:
weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
- opt.half = True # FP16 for fastest results
+ opt.half = torch.cuda.is_available() and opt.device != 'cpu' # FP16 for fastest results
if opt.task == 'speed': # speed benchmarks
# python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
@@ -389,6 +399,8 @@ def main(opt):
np.savetxt(f, y, fmt='%10.4g') # save
os.system('zip -r study.zip study_*.txt')
plot_val_study(x=x) # plot
+ else:
+ raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
if __name__ == "__main__":