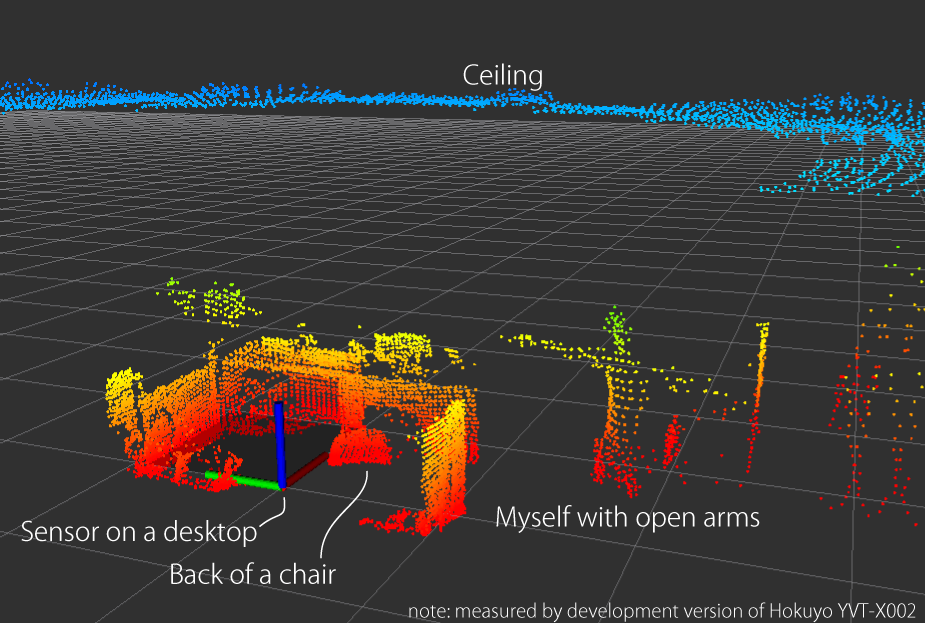
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
forked from emuemuJP/hokuyo3d
-
Notifications
You must be signed in to change notification settings - Fork 0
arayabrain/hokuyo3d
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation
About
A ROS driver node for VSSP protocol compliant HOKUYO 3D LIDARs
Resources
Stars
Watchers
Forks
Packages 0
No packages published
Languages
- C++ 85.0%
- Shell 8.9%
- Dockerfile 4.5%
- CMake 1.6%