


+
+  +
+  +
+  +
+
+ +
+  +
+  +
+
+
+
+ +
+ +
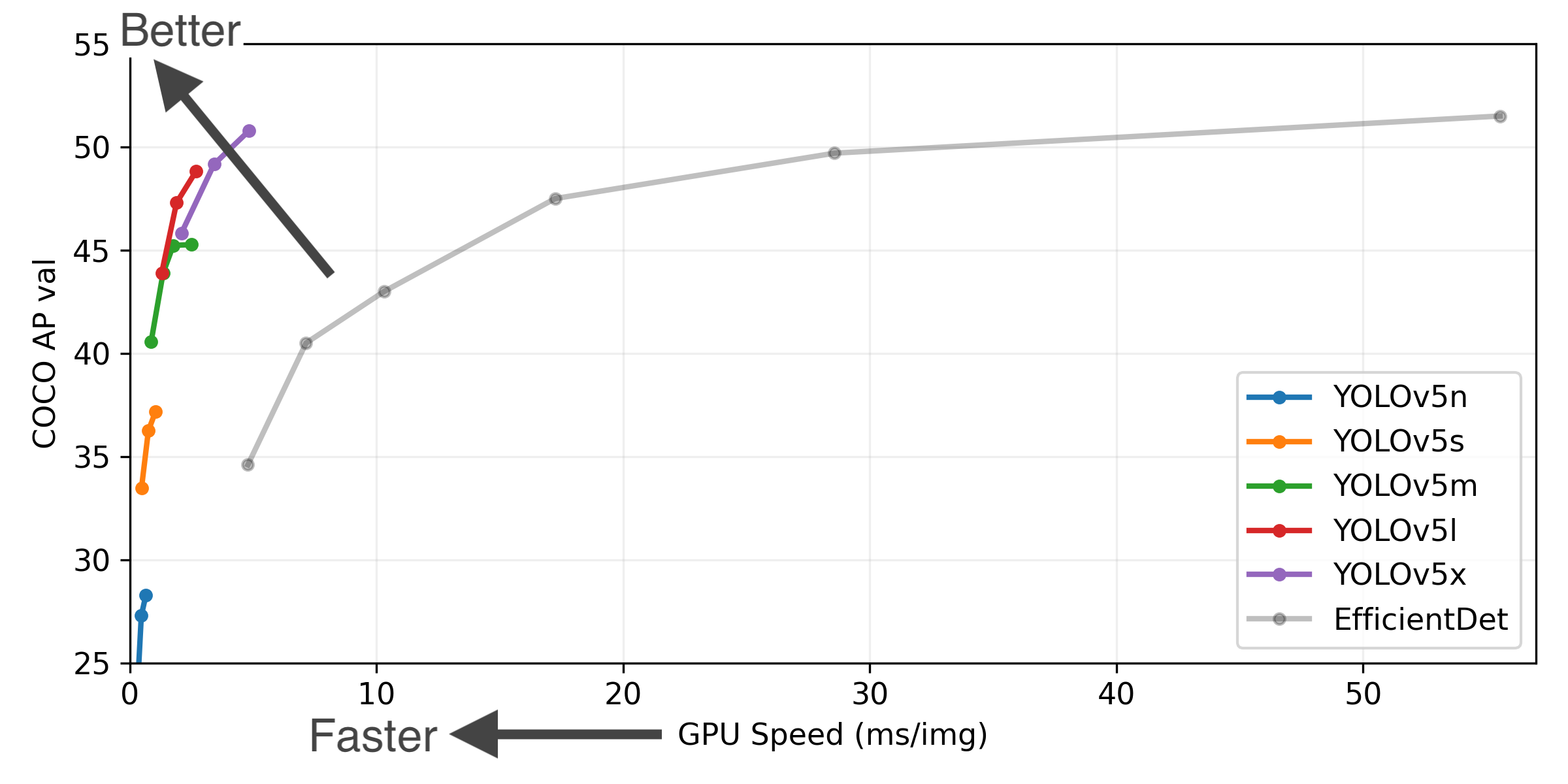
+ YOLOv5🚀是一个在COCO数据集上预训练的物体检测架构和模型系列,它代表了Ultralytics对未来视觉AI方法的公开研究,其中包含了在数千小时的研究和开发中所获得的经验和最佳实践。 +
+ + +
+
+ + YOLOv5🚀是一个在COCO数据集上预训练的物体检测架构和模型系列,它代表了Ultralytics对未来视觉AI方法的公开研究,其中包含了在数千小时的研究和开发中所获得的经验和最佳实践。 +
+ + + +
+
+
+
 +
+##
+ - **Notebooks** with free GPU:
- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status
-
+
+##
+ - **Notebooks** with free GPU:
- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status
- 


-
-  -
-
-
-
+
+ + YOLOv5 🚀 is a family of object detection architectures and models pretrained on the COCO dataset, and represents Ultralytics + open-source research into future vision AI methods, incorporating lessons learned and best practices evolved over thousands of hours of research and development. +
+ +-YOLOv5 🚀 is a family of object detection architectures and models pretrained on the COCO dataset, and represents Ultralytics - open-source research into future vision AI methods, incorporating lessons learned and best practices evolved over thousands of hours of research and development. -
- - - - +
-|Weights and Biases|Roboflow ⭐ NEW|
-|:-:|:-:|
-|Automatically track and visualize all your YOLOv5 training runs in the cloud with [Weights & Biases](https://wandb.ai/site?utm_campaign=repo_yolo_readme)|Label and export your custom datasets directly to YOLOv5 for training with [Roboflow](https://roboflow.com/?ref=ultralytics) |
+|Comet ⭐ NEW|Deci ⭐ NEW|ClearML ⭐ NEW|Roboflow|
+|:-:|:-:|:-:|:-:|
+|Visualize model metrics and predictions and upload models and datasets in realtime with [Comet](https://bit.ly/yolov5-readme-comet)|Automatically compile and quantize YOLOv5 for better inference performance in one click at [Deci](https://bit.ly/yolov5-deci-platform)|Automatically track, visualize and even remotely train YOLOv5 using [ClearML](https://cutt.ly/yolov5-readme-clearml) (open-source!)|Label and export your custom datasets directly to YOLOv5 for training with [Roboflow](https://roboflow.com/?ref=ultralytics)|
-
-
##
+
-|Weights and Biases|Roboflow ⭐ NEW|
-|:-:|:-:|
-|Automatically track and visualize all your YOLOv5 training runs in the cloud with [Weights & Biases](https://wandb.ai/site?utm_campaign=repo_yolo_readme)|Label and export your custom datasets directly to YOLOv5 for training with [Roboflow](https://roboflow.com/?ref=ultralytics) |
+|Comet ⭐ NEW|Deci ⭐ NEW|ClearML ⭐ NEW|Roboflow|
+|:-:|:-:|:-:|:-:|
+|Visualize model metrics and predictions and upload models and datasets in realtime with [Comet](https://bit.ly/yolov5-readme-comet)|Automatically compile and quantize YOLOv5 for better inference performance in one click at [Deci](https://bit.ly/yolov5-deci-platform)|Automatically track, visualize and even remotely train YOLOv5 using [ClearML](https://cutt.ly/yolov5-readme-clearml) (open-source!)|Label and export your custom datasets directly to YOLOv5 for training with [Roboflow](https://roboflow.com/?ref=ultralytics)|
-
-
## 
 +
+
##
+
+
##  \n",
+ "
\n",
+ " \n",
+ "\n",
+ "\n",
+ "
\n",
+ "\n",
+ "\n",
+ " \n",
+ "
\n",
+ " "
+ ],
"metadata": {
- "id": "DLI1JmHU7B0l"
- },
+ "id": "nWOsI5wJR1o3"
+ }
+ },
+ {
+ "cell_type": "markdown",
"source": [
- "## Weights & Biases Logging 🌟 NEW\n",
+ "## ClearML Logging and Automation 🌟 NEW\n",
"\n",
- "[Weights & Biases](https://wandb.ai/site?utm_campaign=repo_yolo_notebook) (W&B) is now integrated with YOLOv5 for real-time visualization and cloud logging of training runs. This allows for better run comparison and introspection, as well improved visibility and collaboration for teams. To enable W&B `pip install wandb`, and then train normally (you will be guided through setup on first use). \n",
+ "[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
- "During training you will see live updates at [https://wandb.ai/home](https://wandb.ai/home?utm_campaign=repo_yolo_notebook), and you can create and share detailed [Reports](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY) of your results. For more information see the [YOLOv5 Weights & Biases Tutorial](https://github.com/ultralytics/yolov5/issues/1289). \n",
+ "- `pip install clearml`\n",
+ "- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
- "
"
+ ],
"metadata": {
- "id": "DLI1JmHU7B0l"
- },
+ "id": "nWOsI5wJR1o3"
+ }
+ },
+ {
+ "cell_type": "markdown",
"source": [
- "## Weights & Biases Logging 🌟 NEW\n",
+ "## ClearML Logging and Automation 🌟 NEW\n",
"\n",
- "[Weights & Biases](https://wandb.ai/site?utm_campaign=repo_yolo_notebook) (W&B) is now integrated with YOLOv5 for real-time visualization and cloud logging of training runs. This allows for better run comparison and introspection, as well improved visibility and collaboration for teams. To enable W&B `pip install wandb`, and then train normally (you will be guided through setup on first use). \n",
+ "[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
- "During training you will see live updates at [https://wandb.ai/home](https://wandb.ai/home?utm_campaign=repo_yolo_notebook), and you can create and share detailed [Reports](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY) of your results. For more information see the [YOLOv5 Weights & Biases Tutorial](https://github.com/ultralytics/yolov5/issues/1289). \n",
+ "- `pip install clearml`\n",
+ "- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
- "
 "
+ ],
+ "metadata": {
+ "id": "Lay2WsTjNJzP"
+ }
},
{
"cell_type": "markdown",
@@ -915,25 +910,11 @@
"source": [
"## Local Logging\n",
"\n",
- "All results are logged by default to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc. View train and val jpgs to see mosaics, labels, predictions and augmentation effects. Note an Ultralytics **Mosaic Dataloader** is used for training (shown below), which combines 4 images into 1 mosaic during training.\n",
- "\n",
- ">
"
+ ],
+ "metadata": {
+ "id": "Lay2WsTjNJzP"
+ }
},
{
"cell_type": "markdown",
@@ -915,25 +910,11 @@
"source": [
"## Local Logging\n",
"\n",
- "All results are logged by default to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc. View train and val jpgs to see mosaics, labels, predictions and augmentation effects. Note an Ultralytics **Mosaic Dataloader** is used for training (shown below), which combines 4 images into 1 mosaic during training.\n",
- "\n",
- ">  \n",
- "`train_batch0.jpg` shows train batch 0 mosaics and labels\n",
- "\n",
- ">
\n",
- "`train_batch0.jpg` shows train batch 0 mosaics and labels\n",
- "\n",
- ">  \n",
- "`test_batch0_labels.jpg` shows val batch 0 labels\n",
- "\n",
- ">
\n",
- "`test_batch0_labels.jpg` shows val batch 0 labels\n",
- "\n",
- ">  \n",
- "`test_batch0_pred.jpg` shows val batch 0 _predictions_\n",
+ "Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
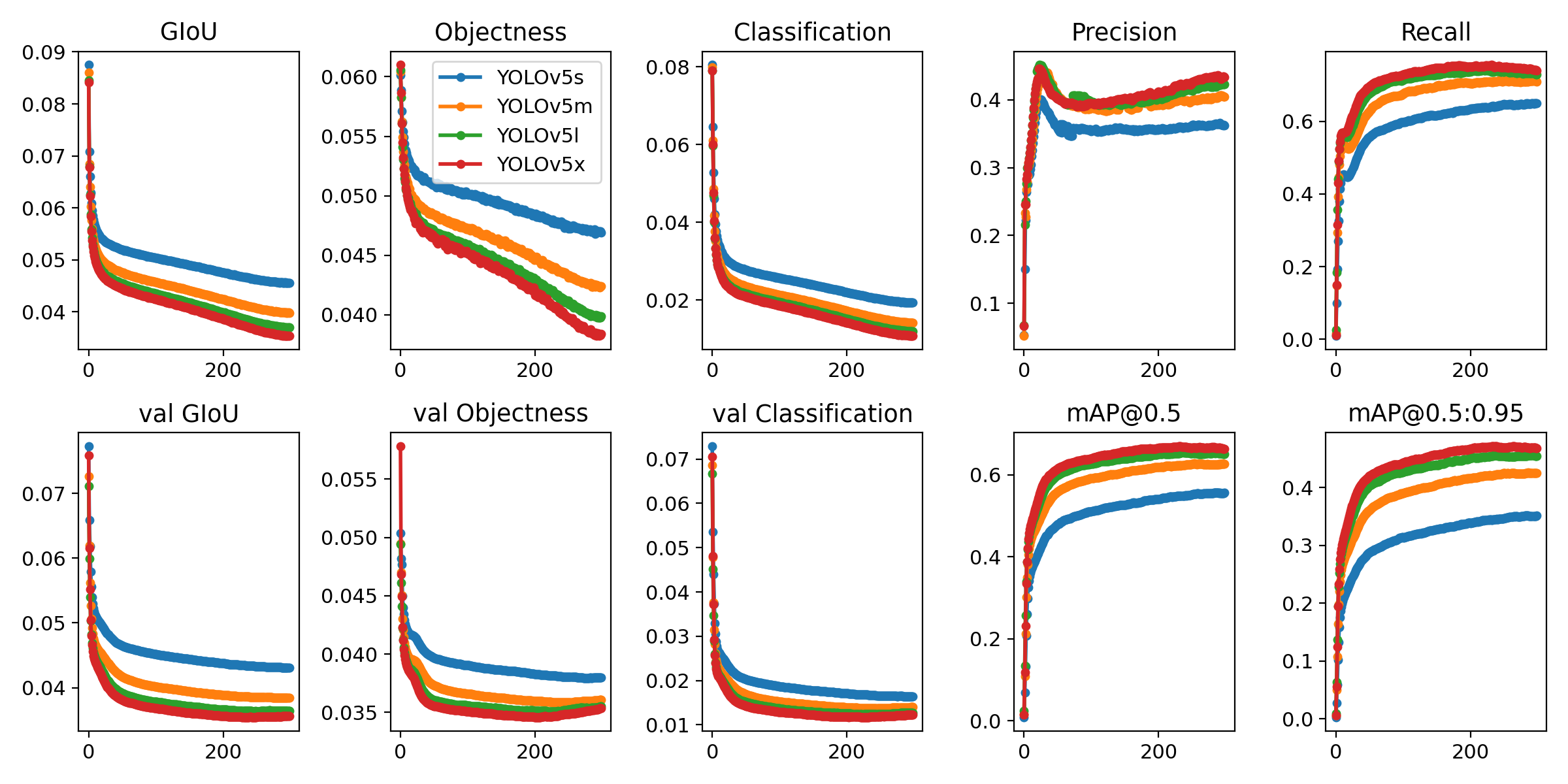
- "Training results are automatically logged to [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) as `results.csv`, which is plotted as `results.png` (below) after training completes. You can also plot any `results.csv` file manually:\n",
+ "This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
"\n",
- "```python\n",
- "from utils.plots import plot_results \n",
- "plot_results('path/to/results.csv') # plot 'results.csv' as 'results.png'\n",
- "```\n",
- "\n",
- "
\n",
- "`test_batch0_pred.jpg` shows val batch 0 _predictions_\n",
+ "Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
- "Training results are automatically logged to [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) as `results.csv`, which is plotted as `results.png` (below) after training completes. You can also plot any `results.csv` file manually:\n",
+ "This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
"\n",
- "```python\n",
- "from utils.plots import plot_results \n",
- "plot_results('path/to/results.csv') # plot 'results.csv' as 'results.png'\n",
- "```\n",
- "\n",
- " "
+ "
"
+ " \n"
]
},
{
@@ -946,7 +927,7 @@
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
- "- **Google Colab and Kaggle** notebooks with free GPU: \n",
+ "- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
\n"
]
},
{
@@ -946,7 +927,7 @@
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
- "- **Google Colab and Kaggle** notebooks with free GPU: \n",
+ "- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  \n"
@@ -960,9 +941,9 @@
"source": [
"# Status\n",
"\n",
- "\n",
+ "\n",
"\n",
- "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
@@ -973,42 +954,28 @@
"source": [
"# Appendix\n",
"\n",
- "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
+ "Additional content below for PyTorch Hub, CI, reproducing results, profiling speeds, VOC training, classification training and TensorRT example."
]
},
- {
- "cell_type": "code",
- "metadata": {
- "id": "mcKoSIK2WSzj"
- },
- "source": [
- "# Reproduce\n",
- "for x in 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
- ],
- "execution_count": null,
- "outputs": []
- },
{
"cell_type": "code",
"metadata": {
"id": "GMusP4OAxFu6"
},
"source": [
- "# PyTorch Hub\n",
"import torch\n",
"\n",
- "# Model\n",
- "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
+ "# PyTorch Hub Model\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5n - yolov5x6, custom\n",
"\n",
"# Images\n",
- "dir = 'https://ultralytics.com/images/'\n",
- "imgs = [dir + f for f in ('zidane.jpg', 'bus.jpg')] # batch of images\n",
+ "img = 'https://ultralytics.com/images/zidane.jpg' # or file, Path, PIL, OpenCV, numpy, list\n",
"\n",
"# Inference\n",
- "results = model(imgs)\n",
- "results.print() # or .show(), .save()"
+ "results = model(img)\n",
+ "\n",
+ "# Results\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
],
"execution_count": null,
"outputs": []
@@ -1019,24 +986,36 @@
"id": "FGH0ZjkGjejy"
},
"source": [
- "# CI Checks\n",
+ "# YOLOv5 CI\n",
"%%shell\n",
- "export PYTHONPATH=\"$PWD\" # to run *.py. files in subdirectories\n",
"rm -rf runs # remove runs/\n",
- "for m in yolov5n; do # models\n",
- " python train.py --img 64 --batch 32 --weights $m.pt --epochs 1 --device 0 # train pretrained\n",
- " python train.py --img 64 --batch 32 --weights '' --cfg $m.yaml --epochs 1 --device 0 # train scratch\n",
- " for d in 0 cpu; do # devices\n",
- " python val.py --weights $m.pt --device $d # val official\n",
- " python val.py --weights runs/train/exp/weights/best.pt --device $d # val custom\n",
- " python detect.py --weights $m.pt --device $d # detect official\n",
- " python detect.py --weights runs/train/exp/weights/best.pt --device $d # detect custom\n",
+ "m=yolov5n # official weights\n",
+ "b=runs/train/exp/weights/best # best.pt checkpoint\n",
+ "python train.py --imgsz 64 --batch 32 --weights $m.pt --cfg $m.yaml --epochs 1 --device 0 # train\n",
+ "for d in 0 cpu; do # devices\n",
+ " for w in $m $b; do # weights\n",
+ " python val.py --imgsz 64 --batch 32 --weights $w.pt --device $d # val\n",
+ " python detect.py --imgsz 64 --weights $w.pt --device $d # detect\n",
" done\n",
- " python hubconf.py # hub\n",
- " python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
- " python models/tf.py --weights $m.pt # build TensorFlow model\n",
- " python export.py --img 64 --batch 1 --weights $m.pt --include torchscript onnx # export\n",
- "done"
+ "done\n",
+ "python hubconf.py --model $m # hub\n",
+ "python models/tf.py --weights $m.pt # build TF model\n",
+ "python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
+ "python export.py --weights $m.pt --img 64 --include torchscript # export"
+ ],
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
+ "metadata": {
+ "id": "mcKoSIK2WSzj"
+ },
+ "source": [
+ "# Reproduce\n",
+ "for x in (f'yolov5{x}' for x in 'nsmlx'):\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
],
"execution_count": null,
"outputs": []
@@ -1060,26 +1039,53 @@
{
"cell_type": "code",
"metadata": {
- "id": "RVRSOhEvUdb5"
+ "id": "BSgFCAcMbk1R"
},
"source": [
- "# Evolve\n",
- "!python train.py --img 640 --batch 64 --epochs 100 --data coco128.yaml --weights yolov5s.pt --cache --noautoanchor --evolve\n",
- "!d=runs/train/evolve && cp evolve.* $d && zip -r evolve.zip $d && gsutil mv evolve.zip gs://bucket # upload results (optional)"
+ "# VOC\n",
+ "for b, m in zip([64, 64, 64, 32, 16], [f'yolov5{x}' for x in 'nsmlx']): # batch, model\n",
+ " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.VOC.yaml --project VOC --name {m} --cache"
],
"execution_count": null,
"outputs": []
},
{
"cell_type": "code",
+ "source": [
+ "# Classification train\n",
+ "for m in [*(f'yolov5{x}-cls.pt' for x in 'nsmlx'), 'resnet50.pt', 'resnet101.pt', 'efficientnet_b0.pt', 'efficientnet_b1.pt']:\n",
+ " for d in 'mnist', 'fashion-mnist', 'cifar10', 'cifar100', 'imagenette160', 'imagenette320', 'imagenette', 'imagewoof160', 'imagewoof320', 'imagewoof':\n",
+ " !python classify/train.py --model {m} --data {d} --epochs 10 --project YOLOv5-cls --name {m}-{d}"
+ ],
"metadata": {
- "id": "BSgFCAcMbk1R"
+ "id": "UWGH7H6yakVl"
+ },
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
+ "source": [
+ "# Classification val\n",
+ "!bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G - 50000 images)\n",
+ "!python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate"
+ ],
+ "metadata": {
+ "id": "yYgOiFNHZx-1"
},
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
"source": [
- "# VOC\n",
- "for b, m in zip([64, 64, 32, 16], ['yolov5s', 'yolov5m', 'yolov5l', 'yolov5x']): # zip(batch_size, model)\n",
- " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --cache --img 512 --nosave --hyp hyp.finetune.yaml --project VOC --name {m}"
+ "# Validate on COCO test. Zip results.json and submit to eval server at https://competitions.codalab.org/competitions/20794\n",
+ "!bash data/scripts/get_coco.sh --test # download COCO test-dev2017 (7G - 40000 images, test 20000)\n",
+ "!python val.py --weights yolov5x.pt --data coco.yaml --img 640 --iou 0.65 --half --task test"
],
+ "metadata": {
+ "id": "aq4DPWGu0Bl1"
+ },
"execution_count": null,
"outputs": []
},
@@ -1090,10 +1096,9 @@
},
"source": [
"# TensorRT \n",
- "# https://docs.nvidia.com/deeplearning/tensorrt/install-guide/index.html#installing-pip\n",
"!pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # install\n",
- "!python export.py --weights yolov5s.pt --include engine --imgsz 640 640 --device 0 # export\n",
- "!python detect.py --weights yolov5s.engine --imgsz 640 640 --device 0 # inference"
+ "!python export.py --weights yolov5s.pt --include engine --imgsz 640 --device 0 # export\n",
+ "!python detect.py --weights yolov5s.engine --imgsz 640 --device 0 # inference"
],
"execution_count": null,
"outputs": []
diff --git a/utils/__init__.py b/utils/__init__.py
index 4658ed6473cd..0afe6f475625 100644
--- a/utils/__init__.py
+++ b/utils/__init__.py
@@ -3,6 +3,39 @@
utils/initialization
"""
+import contextlib
+import platform
+import threading
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg=''):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(emojis(f"{self.msg}{': ' if self.msg else ''}{value}"))
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
def notebook_init(verbose=True):
# Check system software and hardware
@@ -11,24 +44,25 @@ def notebook_init(verbose=True):
import os
import shutil
- from utils.general import check_requirements, emojis, is_colab
+ from utils.general import check_font, check_requirements, is_colab
from utils.torch_utils import select_device # imports
check_requirements(('psutil', 'IPython'))
+ check_font()
+
import psutil
from IPython import display # to display images and clear console output
if is_colab():
shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+ # System info
if verbose:
- # System info
- # gb = 1 / 1000 ** 3 # bytes to GB
- gib = 1 / 1024 ** 3 # bytes to GiB
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
ram = psutil.virtual_memory().total
total, used, free = shutil.disk_usage("/")
display.clear_output()
- s = f'({os.cpu_count()} CPUs, {ram * gib:.1f} GB RAM, {(total - free) * gib:.1f}/{total * gib:.1f} GB disk)'
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
else:
s = ''
diff --git a/utils/activations.py b/utils/activations.py
index a4ff789cf336..084ce8c41230 100644
--- a/utils/activations.py
+++ b/utils/activations.py
@@ -8,29 +8,32 @@
import torch.nn.functional as F
-# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
-class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
@staticmethod
def forward(x):
return x * torch.sigmoid(x)
-class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
@staticmethod
def forward(x):
# return x * F.hardsigmoid(x) # for TorchScript and CoreML
return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
-# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
@staticmethod
def forward(x):
return x * F.softplus(x).tanh()
class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
class F(torch.autograd.Function):
+
@staticmethod
def forward(ctx, x):
ctx.save_for_backward(x)
@@ -47,8 +50,8 @@ def forward(self, x):
return self.F.apply(x)
-# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
def __init__(self, c1, k=3): # ch_in, kernel
super().__init__()
self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
@@ -58,9 +61,8 @@ def forward(self, x):
return torch.max(x, self.bn(self.conv(x)))
-# ACON https://arxiv.org/pdf/2009.04759.pdf ----------------------------------------------------------------------------
class AconC(nn.Module):
- r""" ACON activation (activate or not).
+ r""" ACON activation (activate or not)
AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
according to "Activate or Not: Learning Customized Activation"
\n"
@@ -960,9 +941,9 @@
"source": [
"# Status\n",
"\n",
- "\n",
+ "\n",
"\n",
- "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
@@ -973,42 +954,28 @@
"source": [
"# Appendix\n",
"\n",
- "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
+ "Additional content below for PyTorch Hub, CI, reproducing results, profiling speeds, VOC training, classification training and TensorRT example."
]
},
- {
- "cell_type": "code",
- "metadata": {
- "id": "mcKoSIK2WSzj"
- },
- "source": [
- "# Reproduce\n",
- "for x in 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
- " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
- ],
- "execution_count": null,
- "outputs": []
- },
{
"cell_type": "code",
"metadata": {
"id": "GMusP4OAxFu6"
},
"source": [
- "# PyTorch Hub\n",
"import torch\n",
"\n",
- "# Model\n",
- "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
+ "# PyTorch Hub Model\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5n - yolov5x6, custom\n",
"\n",
"# Images\n",
- "dir = 'https://ultralytics.com/images/'\n",
- "imgs = [dir + f for f in ('zidane.jpg', 'bus.jpg')] # batch of images\n",
+ "img = 'https://ultralytics.com/images/zidane.jpg' # or file, Path, PIL, OpenCV, numpy, list\n",
"\n",
"# Inference\n",
- "results = model(imgs)\n",
- "results.print() # or .show(), .save()"
+ "results = model(img)\n",
+ "\n",
+ "# Results\n",
+ "results.print() # or .show(), .save(), .crop(), .pandas(), etc."
],
"execution_count": null,
"outputs": []
@@ -1019,24 +986,36 @@
"id": "FGH0ZjkGjejy"
},
"source": [
- "# CI Checks\n",
+ "# YOLOv5 CI\n",
"%%shell\n",
- "export PYTHONPATH=\"$PWD\" # to run *.py. files in subdirectories\n",
"rm -rf runs # remove runs/\n",
- "for m in yolov5n; do # models\n",
- " python train.py --img 64 --batch 32 --weights $m.pt --epochs 1 --device 0 # train pretrained\n",
- " python train.py --img 64 --batch 32 --weights '' --cfg $m.yaml --epochs 1 --device 0 # train scratch\n",
- " for d in 0 cpu; do # devices\n",
- " python val.py --weights $m.pt --device $d # val official\n",
- " python val.py --weights runs/train/exp/weights/best.pt --device $d # val custom\n",
- " python detect.py --weights $m.pt --device $d # detect official\n",
- " python detect.py --weights runs/train/exp/weights/best.pt --device $d # detect custom\n",
+ "m=yolov5n # official weights\n",
+ "b=runs/train/exp/weights/best # best.pt checkpoint\n",
+ "python train.py --imgsz 64 --batch 32 --weights $m.pt --cfg $m.yaml --epochs 1 --device 0 # train\n",
+ "for d in 0 cpu; do # devices\n",
+ " for w in $m $b; do # weights\n",
+ " python val.py --imgsz 64 --batch 32 --weights $w.pt --device $d # val\n",
+ " python detect.py --imgsz 64 --weights $w.pt --device $d # detect\n",
" done\n",
- " python hubconf.py # hub\n",
- " python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
- " python models/tf.py --weights $m.pt # build TensorFlow model\n",
- " python export.py --img 64 --batch 1 --weights $m.pt --include torchscript onnx # export\n",
- "done"
+ "done\n",
+ "python hubconf.py --model $m # hub\n",
+ "python models/tf.py --weights $m.pt # build TF model\n",
+ "python models/yolo.py --cfg $m.yaml # build PyTorch model\n",
+ "python export.py --weights $m.pt --img 64 --include torchscript # export"
+ ],
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
+ "metadata": {
+ "id": "mcKoSIK2WSzj"
+ },
+ "source": [
+ "# Reproduce\n",
+ "for x in (f'yolov5{x}' for x in 'nsmlx'):\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --task speed # speed\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
],
"execution_count": null,
"outputs": []
@@ -1060,26 +1039,53 @@
{
"cell_type": "code",
"metadata": {
- "id": "RVRSOhEvUdb5"
+ "id": "BSgFCAcMbk1R"
},
"source": [
- "# Evolve\n",
- "!python train.py --img 640 --batch 64 --epochs 100 --data coco128.yaml --weights yolov5s.pt --cache --noautoanchor --evolve\n",
- "!d=runs/train/evolve && cp evolve.* $d && zip -r evolve.zip $d && gsutil mv evolve.zip gs://bucket # upload results (optional)"
+ "# VOC\n",
+ "for b, m in zip([64, 64, 64, 32, 16], [f'yolov5{x}' for x in 'nsmlx']): # batch, model\n",
+ " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.VOC.yaml --project VOC --name {m} --cache"
],
"execution_count": null,
"outputs": []
},
{
"cell_type": "code",
+ "source": [
+ "# Classification train\n",
+ "for m in [*(f'yolov5{x}-cls.pt' for x in 'nsmlx'), 'resnet50.pt', 'resnet101.pt', 'efficientnet_b0.pt', 'efficientnet_b1.pt']:\n",
+ " for d in 'mnist', 'fashion-mnist', 'cifar10', 'cifar100', 'imagenette160', 'imagenette320', 'imagenette', 'imagewoof160', 'imagewoof320', 'imagewoof':\n",
+ " !python classify/train.py --model {m} --data {d} --epochs 10 --project YOLOv5-cls --name {m}-{d}"
+ ],
"metadata": {
- "id": "BSgFCAcMbk1R"
+ "id": "UWGH7H6yakVl"
+ },
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
+ "source": [
+ "# Classification val\n",
+ "!bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G - 50000 images)\n",
+ "!python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate"
+ ],
+ "metadata": {
+ "id": "yYgOiFNHZx-1"
},
+ "execution_count": null,
+ "outputs": []
+ },
+ {
+ "cell_type": "code",
"source": [
- "# VOC\n",
- "for b, m in zip([64, 64, 32, 16], ['yolov5s', 'yolov5m', 'yolov5l', 'yolov5x']): # zip(batch_size, model)\n",
- " !python train.py --batch {b} --weights {m}.pt --data VOC.yaml --epochs 50 --cache --img 512 --nosave --hyp hyp.finetune.yaml --project VOC --name {m}"
+ "# Validate on COCO test. Zip results.json and submit to eval server at https://competitions.codalab.org/competitions/20794\n",
+ "!bash data/scripts/get_coco.sh --test # download COCO test-dev2017 (7G - 40000 images, test 20000)\n",
+ "!python val.py --weights yolov5x.pt --data coco.yaml --img 640 --iou 0.65 --half --task test"
],
+ "metadata": {
+ "id": "aq4DPWGu0Bl1"
+ },
"execution_count": null,
"outputs": []
},
@@ -1090,10 +1096,9 @@
},
"source": [
"# TensorRT \n",
- "# https://docs.nvidia.com/deeplearning/tensorrt/install-guide/index.html#installing-pip\n",
"!pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # install\n",
- "!python export.py --weights yolov5s.pt --include engine --imgsz 640 640 --device 0 # export\n",
- "!python detect.py --weights yolov5s.engine --imgsz 640 640 --device 0 # inference"
+ "!python export.py --weights yolov5s.pt --include engine --imgsz 640 --device 0 # export\n",
+ "!python detect.py --weights yolov5s.engine --imgsz 640 --device 0 # inference"
],
"execution_count": null,
"outputs": []
diff --git a/utils/__init__.py b/utils/__init__.py
index 4658ed6473cd..0afe6f475625 100644
--- a/utils/__init__.py
+++ b/utils/__init__.py
@@ -3,6 +3,39 @@
utils/initialization
"""
+import contextlib
+import platform
+import threading
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg=''):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(emojis(f"{self.msg}{': ' if self.msg else ''}{value}"))
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
def notebook_init(verbose=True):
# Check system software and hardware
@@ -11,24 +44,25 @@ def notebook_init(verbose=True):
import os
import shutil
- from utils.general import check_requirements, emojis, is_colab
+ from utils.general import check_font, check_requirements, is_colab
from utils.torch_utils import select_device # imports
check_requirements(('psutil', 'IPython'))
+ check_font()
+
import psutil
from IPython import display # to display images and clear console output
if is_colab():
shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+ # System info
if verbose:
- # System info
- # gb = 1 / 1000 ** 3 # bytes to GB
- gib = 1 / 1024 ** 3 # bytes to GiB
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
ram = psutil.virtual_memory().total
total, used, free = shutil.disk_usage("/")
display.clear_output()
- s = f'({os.cpu_count()} CPUs, {ram * gib:.1f} GB RAM, {(total - free) * gib:.1f}/{total * gib:.1f} GB disk)'
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
else:
s = ''
diff --git a/utils/activations.py b/utils/activations.py
index a4ff789cf336..084ce8c41230 100644
--- a/utils/activations.py
+++ b/utils/activations.py
@@ -8,29 +8,32 @@
import torch.nn.functional as F
-# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
-class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
@staticmethod
def forward(x):
return x * torch.sigmoid(x)
-class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
@staticmethod
def forward(x):
# return x * F.hardsigmoid(x) # for TorchScript and CoreML
return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
-# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
@staticmethod
def forward(x):
return x * F.softplus(x).tanh()
class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
class F(torch.autograd.Function):
+
@staticmethod
def forward(ctx, x):
ctx.save_for_backward(x)
@@ -47,8 +50,8 @@ def forward(self, x):
return self.F.apply(x)
-# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
def __init__(self, c1, k=3): # ch_in, kernel
super().__init__()
self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
@@ -58,9 +61,8 @@ def forward(self, x):
return torch.max(x, self.bn(self.conv(x)))
-# ACON https://arxiv.org/pdf/2009.04759.pdf ----------------------------------------------------------------------------
class AconC(nn.Module):
- r""" ACON activation (activate or not).
+ r""" ACON activation (activate or not)
AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
according to "Activate or Not: Learning Customized Activation" 
 +
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+ +
+# Try out an Example!
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+
+Or better yet, try it out yourself in this Colab Notebook
+
+[](https://colab.research.google.com/drive/1RG0WOQyxlDlo5Km8GogJpIEJlg_5lyYO?usp=sharing)
+
+# Log automatically
+
+By default, Comet will log the following items
+
+## Metrics
+- Box Loss, Object Loss, Classification Loss for the training and validation data
+- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
+- Precision and Recall for the validation data
+
+## Parameters
+
+- Model Hyperparameters
+- All parameters passed through the command line options
+
+## Visualizations
+
+- Confusion Matrix of the model predictions on the validation data
+- Plots for the PR and F1 curves across all classes
+- Correlogram of the Class Labels
+
+# Configure Comet Logging
+
+Comet can be configured to log additional data either through command line flags passed to the training script
+or through environment variables.
+
+```shell
+export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
+export COMET_MODEL_NAME=
+
+# Try out an Example!
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+
+Or better yet, try it out yourself in this Colab Notebook
+
+[](https://colab.research.google.com/drive/1RG0WOQyxlDlo5Km8GogJpIEJlg_5lyYO?usp=sharing)
+
+# Log automatically
+
+By default, Comet will log the following items
+
+## Metrics
+- Box Loss, Object Loss, Classification Loss for the training and validation data
+- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
+- Precision and Recall for the validation data
+
+## Parameters
+
+- Model Hyperparameters
+- All parameters passed through the command line options
+
+## Visualizations
+
+- Confusion Matrix of the model predictions on the validation data
+- Plots for the PR and F1 curves across all classes
+- Correlogram of the Class Labels
+
+# Configure Comet Logging
+
+Comet can be configured to log additional data either through command line flags passed to the training script
+or through environment variables.
+
+```shell
+export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
+export COMET_MODEL_NAME= +
+You can preview the data directly in the Comet UI.
+
+
+You can preview the data directly in the Comet UI.
+ +
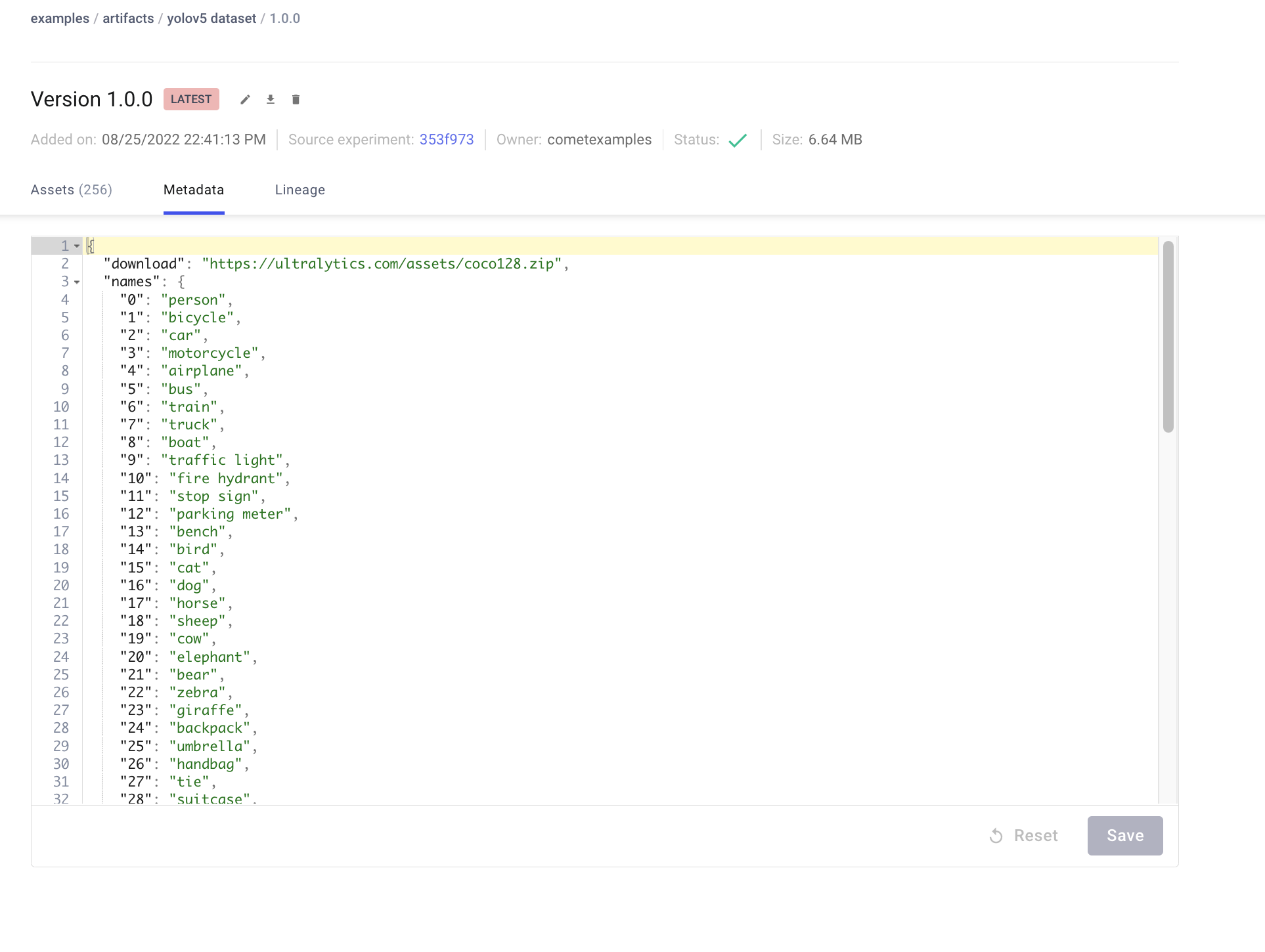
+Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file
+
+
+Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file
+ +
+### Using a saved Artifact
+
+If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
+
+```
+# contents of artifact.yaml file
+path: "comet://
+
+### Using a saved Artifact
+
+If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
+
+```
+# contents of artifact.yaml file
+path: "comet:// +
+## Resuming a Training Run
+
+If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
+
+The Run Path has the following format `comet://
+
+## Resuming a Training Run
+
+If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
+
+The Run Path has the following format `comet://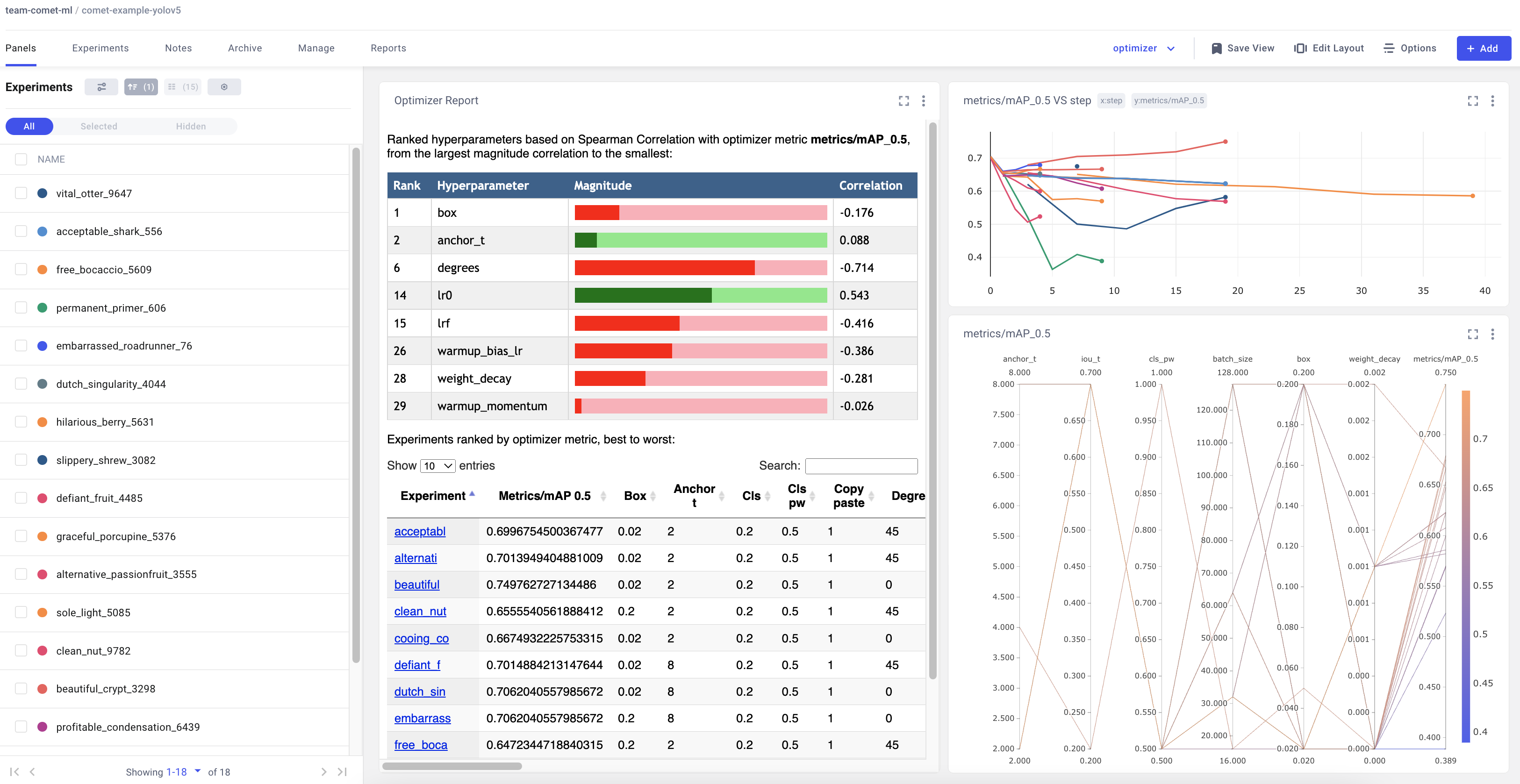 diff --git a/utils/loggers/comet/__init__.py b/utils/loggers/comet/__init__.py
new file mode 100644
index 000000000000..b0318f88d6a6
--- /dev/null
+++ b/utils/loggers/comet/__init__.py
@@ -0,0 +1,508 @@
+import glob
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+try:
+ import comet_ml
+
+ # Project Configuration
+ config = comet_ml.config.get_config()
+ COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+ COMET_PROJECT_NAME = None
+
+import PIL
+import torch
+import torchvision.transforms as T
+import yaml
+
+from utils.dataloaders import img2label_paths
+from utils.general import check_dataset, scale_boxes, xywh2xyxy
+from utils.metrics import box_iou
+
+COMET_PREFIX = "comet://"
+
+COMET_MODE = os.getenv("COMET_MODE", "online")
+
+# Model Saving Settings
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+
+# Dataset Artifact Settings
+COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
+
+# Evaluation Settings
+COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
+COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
+COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
+
+# Confusion Matrix Settings
+CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
+IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
+
+# Batch Logging Settings
+COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
+COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
+COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
+COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
+
+RANK = int(os.getenv("RANK", -1))
+
+to_pil = T.ToPILImage()
+
+
+class CometLogger:
+ """Log metrics, parameters, source code, models and much more
+ with Comet
+ """
+
+ def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
+ self.job_type = job_type
+ self.opt = opt
+ self.hyp = hyp
+
+ # Comet Flags
+ self.comet_mode = COMET_MODE
+
+ self.save_model = opt.save_period > -1
+ self.model_name = COMET_MODEL_NAME
+
+ # Batch Logging Settings
+ self.log_batch_metrics = COMET_LOG_BATCH_METRICS
+ self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
+
+ # Dataset Artifact Settings
+ self.upload_dataset = self.opt.upload_dataset if self.opt.upload_dataset else COMET_UPLOAD_DATASET
+ self.resume = self.opt.resume
+
+ # Default parameters to pass to Experiment objects
+ self.default_experiment_kwargs = {
+ "log_code": False,
+ "log_env_gpu": True,
+ "log_env_cpu": True,
+ "project_name": COMET_PROJECT_NAME,}
+ self.default_experiment_kwargs.update(experiment_kwargs)
+ self.experiment = self._get_experiment(self.comet_mode, run_id)
+
+ self.data_dict = self.check_dataset(self.opt.data)
+ self.class_names = self.data_dict["names"]
+ self.num_classes = self.data_dict["nc"]
+
+ self.logged_images_count = 0
+ self.max_images = COMET_MAX_IMAGE_UPLOADS
+
+ if run_id is None:
+ self.experiment.log_other("Created from", "YOLOv5")
+ if not isinstance(self.experiment, comet_ml.OfflineExperiment):
+ workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
+ self.experiment.log_other(
+ "Run Path",
+ f"{workspace}/{project_name}/{experiment_id}",
+ )
+ self.log_parameters(vars(opt))
+ self.log_parameters(self.opt.hyp)
+ self.log_asset_data(
+ self.opt.hyp,
+ name="hyperparameters.json",
+ metadata={"type": "hyp-config-file"},
+ )
+ self.log_asset(
+ f"{self.opt.save_dir}/opt.yaml",
+ metadata={"type": "opt-config-file"},
+ )
+
+ self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
+
+ if hasattr(self.opt, "conf_thres"):
+ self.conf_thres = self.opt.conf_thres
+ else:
+ self.conf_thres = CONF_THRES
+ if hasattr(self.opt, "iou_thres"):
+ self.iou_thres = self.opt.iou_thres
+ else:
+ self.iou_thres = IOU_THRES
+
+ self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
+
+ self.comet_log_predictions = COMET_LOG_PREDICTIONS
+ if self.opt.bbox_interval == -1:
+ self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
+ else:
+ self.comet_log_prediction_interval = self.opt.bbox_interval
+
+ if self.comet_log_predictions:
+ self.metadata_dict = {}
+ self.logged_image_names = []
+
+ self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
+
+ self.experiment.log_others({
+ "comet_mode": COMET_MODE,
+ "comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
+ "comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
+ "comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
+ "comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
+ "comet_model_name": COMET_MODEL_NAME,})
+
+ # Check if running the Experiment with the Comet Optimizer
+ if hasattr(self.opt, "comet_optimizer_id"):
+ self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
+ self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
+ self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
+ self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
+
+ def _get_experiment(self, mode, experiment_id=None):
+ if mode == "offline":
+ if experiment_id is not None:
+ return comet_ml.ExistingOfflineExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.OfflineExperiment(**self.default_experiment_kwargs,)
+
+ else:
+ try:
+ if experiment_id is not None:
+ return comet_ml.ExistingExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.Experiment(**self.default_experiment_kwargs)
+
+ except ValueError:
+ logger.warning("COMET WARNING: "
+ "Comet credentials have not been set. "
+ "Comet will default to offline logging. "
+ "Please set your credentials to enable online logging.")
+ return self._get_experiment("offline", experiment_id)
+
+ return
+
+ def log_metrics(self, log_dict, **kwargs):
+ self.experiment.log_metrics(log_dict, **kwargs)
+
+ def log_parameters(self, log_dict, **kwargs):
+ self.experiment.log_parameters(log_dict, **kwargs)
+
+ def log_asset(self, asset_path, **kwargs):
+ self.experiment.log_asset(asset_path, **kwargs)
+
+ def log_asset_data(self, asset, **kwargs):
+ self.experiment.log_asset_data(asset, **kwargs)
+
+ def log_image(self, img, **kwargs):
+ self.experiment.log_image(img, **kwargs)
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ if not self.save_model:
+ return
+
+ model_metadata = {
+ "fitness_score": fitness_score[-1],
+ "epochs_trained": epoch + 1,
+ "save_period": opt.save_period,
+ "total_epochs": opt.epochs,}
+
+ model_files = glob.glob(f"{path}/*.pt")
+ for model_path in model_files:
+ name = Path(model_path).name
+
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ metadata=model_metadata,
+ overwrite=True,
+ )
+
+ def check_dataset(self, data_file):
+ with open(data_file) as f:
+ data_config = yaml.safe_load(f)
+
+ if data_config['path'].startswith(COMET_PREFIX):
+ path = data_config['path'].replace(COMET_PREFIX, "")
+ data_dict = self.download_dataset_artifact(path)
+
+ return data_dict
+
+ self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
+
+ return check_dataset(data_file)
+
+ def log_predictions(self, image, labelsn, path, shape, predn):
+ if self.logged_images_count >= self.max_images:
+ return
+ detections = predn[predn[:, 4] > self.conf_thres]
+ iou = box_iou(labelsn[:, 1:], detections[:, :4])
+ mask, _ = torch.where(iou > self.iou_thres)
+ if len(mask) == 0:
+ return
+
+ filtered_detections = detections[mask]
+ filtered_labels = labelsn[mask]
+
+ image_id = path.split("/")[-1].split(".")[0]
+ image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
+ if image_name not in self.logged_image_names:
+ native_scale_image = PIL.Image.open(path)
+ self.log_image(native_scale_image, name=image_name)
+ self.logged_image_names.append(image_name)
+
+ metadata = []
+ for cls, *xyxy in filtered_labels.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}-gt",
+ "score": 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+ for *xyxy, conf, cls in filtered_detections.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}",
+ "score": conf * 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+
+ self.metadata_dict[image_name] = metadata
+ self.logged_images_count += 1
+
+ return
+
+ def preprocess_prediction(self, image, labels, shape, pred):
+ nl, _ = labels.shape[0], pred.shape[0]
+
+ # Predictions
+ if self.opt.single_cls:
+ pred[:, 5] = 0
+
+ predn = pred.clone()
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
+
+ labelsn = None
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
+
+ return predn, labelsn
+
+ def add_assets_to_artifact(self, artifact, path, asset_path, split):
+ img_paths = sorted(glob.glob(f"{asset_path}/*"))
+ label_paths = img2label_paths(img_paths)
+
+ for image_file, label_file in zip(img_paths, label_paths):
+ image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
+
+ try:
+ artifact.add(image_file, logical_path=image_logical_path, metadata={"split": split})
+ artifact.add(label_file, logical_path=label_logical_path, metadata={"split": split})
+ except ValueError as e:
+ logger.error('COMET ERROR: Error adding file to Artifact. Skipping file.')
+ logger.error(f"COMET ERROR: {e}")
+ continue
+
+ return artifact
+
+ def upload_dataset_artifact(self):
+ dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
+ path = str((ROOT / Path(self.data_dict["path"])).resolve())
+
+ metadata = self.data_dict.copy()
+ for key in ["train", "val", "test"]:
+ split_path = metadata.get(key)
+ if split_path is not None:
+ metadata[key] = split_path.replace(path, "")
+
+ artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
+ for key in metadata.keys():
+ if key in ["train", "val", "test"]:
+ if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
+ continue
+
+ asset_path = self.data_dict.get(key)
+ if asset_path is not None:
+ artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
+
+ self.experiment.log_artifact(artifact)
+
+ return
+
+ def download_dataset_artifact(self, artifact_path):
+ logged_artifact = self.experiment.get_artifact(artifact_path)
+ artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
+ logged_artifact.download(artifact_save_dir)
+
+ metadata = logged_artifact.metadata
+ data_dict = metadata.copy()
+ data_dict["path"] = artifact_save_dir
+
+ metadata_names = metadata.get("names")
+ if type(metadata_names) == dict:
+ data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
+ elif type(metadata_names) == list:
+ data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
+ else:
+ raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
+
+ data_dict = self.update_data_paths(data_dict)
+ return data_dict
+
+ def update_data_paths(self, data_dict):
+ path = data_dict.get("path", "")
+
+ for split in ["train", "val", "test"]:
+ if data_dict.get(split):
+ split_path = data_dict.get(split)
+ data_dict[split] = (f"{path}/{split_path}" if isinstance(split, str) else [
+ f"{path}/{x}" for x in split_path])
+
+ return data_dict
+
+ def on_pretrain_routine_end(self, paths):
+ if self.opt.resume:
+ return
+
+ for path in paths:
+ self.log_asset(str(path))
+
+ if self.upload_dataset:
+ if not self.resume:
+ self.upload_dataset_artifact()
+
+ return
+
+ def on_train_start(self):
+ self.log_parameters(self.hyp)
+
+ def on_train_epoch_start(self):
+ return
+
+ def on_train_epoch_end(self, epoch):
+ self.experiment.curr_epoch = epoch
+
+ return
+
+ def on_train_batch_start(self):
+ return
+
+ def on_train_batch_end(self, log_dict, step):
+ self.experiment.curr_step = step
+ if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
+ self.log_metrics(log_dict, step=step)
+
+ return
+
+ def on_train_end(self, files, save_dir, last, best, epoch, results):
+ if self.comet_log_predictions:
+ curr_epoch = self.experiment.curr_epoch
+ self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
+
+ for f in files:
+ self.log_asset(f, metadata={"epoch": epoch})
+ self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
+
+ if not self.opt.evolve:
+ model_path = str(best if best.exists() else last)
+ name = Path(model_path).name
+ if self.save_model:
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ overwrite=True,
+ )
+
+ # Check if running Experiment with Comet Optimizer
+ if hasattr(self.opt, 'comet_optimizer_id'):
+ metric = results.get(self.opt.comet_optimizer_metric)
+ self.experiment.log_other('optimizer_metric_value', metric)
+
+ self.finish_run()
+
+ def on_val_start(self):
+ return
+
+ def on_val_batch_start(self):
+ return
+
+ def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
+ if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
+ return
+
+ for si, pred in enumerate(outputs):
+ if len(pred) == 0:
+ continue
+
+ image = images[si]
+ labels = targets[targets[:, 0] == si, 1:]
+ shape = shapes[si]
+ path = paths[si]
+ predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
+ if labelsn is not None:
+ self.log_predictions(image, labelsn, path, shape, predn)
+
+ return
+
+ def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
+ if self.comet_log_per_class_metrics:
+ if self.num_classes > 1:
+ for i, c in enumerate(ap_class):
+ class_name = self.class_names[c]
+ self.experiment.log_metrics(
+ {
+ 'mAP@.5': ap50[i],
+ 'mAP@.5:.95': ap[i],
+ 'precision': p[i],
+ 'recall': r[i],
+ 'f1': f1[i],
+ 'true_positives': tp[i],
+ 'false_positives': fp[i],
+ 'support': nt[c]},
+ prefix=class_name)
+
+ if self.comet_log_confusion_matrix:
+ epoch = self.experiment.curr_epoch
+ class_names = list(self.class_names.values())
+ class_names.append("background")
+ num_classes = len(class_names)
+
+ self.experiment.log_confusion_matrix(
+ matrix=confusion_matrix.matrix,
+ max_categories=num_classes,
+ labels=class_names,
+ epoch=epoch,
+ column_label='Actual Category',
+ row_label='Predicted Category',
+ file_name=f"confusion-matrix-epoch-{epoch}.json",
+ )
+
+ def on_fit_epoch_end(self, result, epoch):
+ self.log_metrics(result, epoch=epoch)
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ def on_params_update(self, params):
+ self.log_parameters(params)
+
+ def finish_run(self):
+ self.experiment.end()
diff --git a/utils/loggers/comet/comet_utils.py b/utils/loggers/comet/comet_utils.py
new file mode 100644
index 000000000000..3cbd45156b57
--- /dev/null
+++ b/utils/loggers/comet/comet_utils.py
@@ -0,0 +1,150 @@
+import logging
+import os
+from urllib.parse import urlparse
+
+try:
+ import comet_ml
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+
+import yaml
+
+logger = logging.getLogger(__name__)
+
+COMET_PREFIX = "comet://"
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
+
+
+def download_model_checkpoint(opt, experiment):
+ model_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(model_dir, exist_ok=True)
+
+ model_name = COMET_MODEL_NAME
+ model_asset_list = experiment.get_model_asset_list(model_name)
+
+ if len(model_asset_list) == 0:
+ logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
+ return
+
+ model_asset_list = sorted(
+ model_asset_list,
+ key=lambda x: x["step"],
+ reverse=True,
+ )
+ logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
+
+ resource_url = urlparse(opt.weights)
+ checkpoint_filename = resource_url.query
+
+ if checkpoint_filename:
+ asset_id = logged_checkpoint_map.get(checkpoint_filename)
+ else:
+ asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
+ checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
+
+ if asset_id is None:
+ logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
+ return
+
+ try:
+ logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
+ asset_filename = checkpoint_filename
+
+ model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ model_download_path = f"{model_dir}/{asset_filename}"
+ with open(model_download_path, "wb") as f:
+ f.write(model_binary)
+
+ opt.weights = model_download_path
+
+ except Exception as e:
+ logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
+ logger.exception(e)
+
+
+def set_opt_parameters(opt, experiment):
+ """Update the opts Namespace with parameters
+ from Comet's ExistingExperiment when resuming a run
+
+ Args:
+ opt (argparse.Namespace): Namespace of command line options
+ experiment (comet_ml.APIExperiment): Comet API Experiment object
+ """
+ asset_list = experiment.get_asset_list()
+ resume_string = opt.resume
+
+ for asset in asset_list:
+ if asset["fileName"] == "opt.yaml":
+ asset_id = asset["assetId"]
+ asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ opt_dict = yaml.safe_load(asset_binary)
+ for key, value in opt_dict.items():
+ setattr(opt, key, value)
+ opt.resume = resume_string
+
+ # Save hyperparameters to YAML file
+ # Necessary to pass checks in training script
+ save_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(save_dir, exist_ok=True)
+
+ hyp_yaml_path = f"{save_dir}/hyp.yaml"
+ with open(hyp_yaml_path, "w") as f:
+ yaml.dump(opt.hyp, f)
+ opt.hyp = hyp_yaml_path
+
+
+def check_comet_weights(opt):
+ """Downloads model weights from Comet and updates the
+ weights path to point to saved weights location
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if weights are successfully downloaded
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.weights, str):
+ if opt.weights.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.weights)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ download_model_checkpoint(opt, experiment)
+ return True
+
+ return None
+
+
+def check_comet_resume(opt):
+ """Restores run parameters to its original state based on the model checkpoint
+ and logged Experiment parameters.
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if the run is restored successfully
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.resume)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ set_opt_parameters(opt, experiment)
+ download_model_checkpoint(opt, experiment)
+
+ return True
+
+ return None
diff --git a/utils/loggers/comet/hpo.py b/utils/loggers/comet/hpo.py
new file mode 100644
index 000000000000..7dd5c92e8de1
--- /dev/null
+++ b/utils/loggers/comet/hpo.py
@@ -0,0 +1,118 @@
+import argparse
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+import comet_ml
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+# Project Configuration
+config = comet_ml.config.get_config()
+COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+
+
+def get_args(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ # Comet Arguments
+ parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
+ parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
+ parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
+ parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
+ parser.add_argument("--comet_optimizer_workers",
+ type=int,
+ default=1,
+ help="Comet: Number of Parallel Workers to use with the Comet Optimizer.")
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def run(parameters, opt):
+ hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
+
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.batch_size = parameters.get("batch_size")
+ opt.epochs = parameters.get("epochs")
+
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ opt = get_args(known=True)
+
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.project = str(opt.project)
+
+ optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
+ if optimizer_id is None:
+ with open(opt.comet_optimizer_config) as f:
+ optimizer_config = json.load(f)
+ optimizer = comet_ml.Optimizer(optimizer_config)
+ else:
+ optimizer = comet_ml.Optimizer(optimizer_id)
+
+ opt.comet_optimizer_id = optimizer.id
+ status = optimizer.status()
+
+ opt.comet_optimizer_objective = status["spec"]["objective"]
+ opt.comet_optimizer_metric = status["spec"]["metric"]
+
+ logger.info("COMET INFO: Starting Hyperparameter Sweep")
+ for parameter in optimizer.get_parameters():
+ run(parameter["parameters"], opt)
diff --git a/utils/loggers/comet/optimizer_config.json b/utils/loggers/comet/optimizer_config.json
new file mode 100644
index 000000000000..83ddddab6f20
--- /dev/null
+++ b/utils/loggers/comet/optimizer_config.json
@@ -0,0 +1,209 @@
+{
+ "algorithm": "random",
+ "parameters": {
+ "anchor_t": {
+ "type": "discrete",
+ "values": [
+ 2,
+ 8
+ ]
+ },
+ "batch_size": {
+ "type": "discrete",
+ "values": [
+ 16,
+ 32,
+ 64
+ ]
+ },
+ "box": {
+ "type": "discrete",
+ "values": [
+ 0.02,
+ 0.2
+ ]
+ },
+ "cls": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "cls_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "copy_paste": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "degrees": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 45
+ ]
+ },
+ "epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "fl_gamma": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "fliplr": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "flipud": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_h": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_s": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_v": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "iou_t": {
+ "type": "discrete",
+ "values": [
+ 0.7
+ ]
+ },
+ "lr0": {
+ "type": "discrete",
+ "values": [
+ 1e-05,
+ 0.1
+ ]
+ },
+ "lrf": {
+ "type": "discrete",
+ "values": [
+ 0.01,
+ 1
+ ]
+ },
+ "mixup": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "momentum": {
+ "type": "discrete",
+ "values": [
+ 0.6
+ ]
+ },
+ "mosaic": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "obj": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "obj_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "optimizer": {
+ "type": "categorical",
+ "values": [
+ "SGD",
+ "Adam",
+ "AdamW"
+ ]
+ },
+ "perspective": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "scale": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "shear": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "translate": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "warmup_bias_lr": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.2
+ ]
+ },
+ "warmup_epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "warmup_momentum": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.95
+ ]
+ },
+ "weight_decay": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.001
+ ]
+ }
+ },
+ "spec": {
+ "maxCombo": 0,
+ "metric": "metrics/mAP_0.5",
+ "objective": "maximize"
+ },
+ "trials": 1
+}
diff --git a/utils/loggers/wandb/README.md b/utils/loggers/wandb/README.md
index 63d999859e6d..d78324b4c8e9 100644
--- a/utils/loggers/wandb/README.md
+++ b/utils/loggers/wandb/README.md
@@ -1,66 +1,72 @@
📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
-* [About Weights & Biases](#about-weights-&-biases)
-* [First-Time Setup](#first-time-setup)
-* [Viewing runs](#viewing-runs)
-* [Disabling wandb](#disabling-wandb)
-* [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
-* [Reports: Share your work with the world!](#reports)
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
## About Weights & Biases
+
Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
- * [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
- * [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
- * [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
- * [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
- * [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
- * [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
## First-Time Setup
+
diff --git a/utils/loggers/comet/__init__.py b/utils/loggers/comet/__init__.py
new file mode 100644
index 000000000000..b0318f88d6a6
--- /dev/null
+++ b/utils/loggers/comet/__init__.py
@@ -0,0 +1,508 @@
+import glob
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+try:
+ import comet_ml
+
+ # Project Configuration
+ config = comet_ml.config.get_config()
+ COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+ COMET_PROJECT_NAME = None
+
+import PIL
+import torch
+import torchvision.transforms as T
+import yaml
+
+from utils.dataloaders import img2label_paths
+from utils.general import check_dataset, scale_boxes, xywh2xyxy
+from utils.metrics import box_iou
+
+COMET_PREFIX = "comet://"
+
+COMET_MODE = os.getenv("COMET_MODE", "online")
+
+# Model Saving Settings
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+
+# Dataset Artifact Settings
+COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
+
+# Evaluation Settings
+COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
+COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
+COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
+
+# Confusion Matrix Settings
+CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
+IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
+
+# Batch Logging Settings
+COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
+COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
+COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
+COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
+
+RANK = int(os.getenv("RANK", -1))
+
+to_pil = T.ToPILImage()
+
+
+class CometLogger:
+ """Log metrics, parameters, source code, models and much more
+ with Comet
+ """
+
+ def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
+ self.job_type = job_type
+ self.opt = opt
+ self.hyp = hyp
+
+ # Comet Flags
+ self.comet_mode = COMET_MODE
+
+ self.save_model = opt.save_period > -1
+ self.model_name = COMET_MODEL_NAME
+
+ # Batch Logging Settings
+ self.log_batch_metrics = COMET_LOG_BATCH_METRICS
+ self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
+
+ # Dataset Artifact Settings
+ self.upload_dataset = self.opt.upload_dataset if self.opt.upload_dataset else COMET_UPLOAD_DATASET
+ self.resume = self.opt.resume
+
+ # Default parameters to pass to Experiment objects
+ self.default_experiment_kwargs = {
+ "log_code": False,
+ "log_env_gpu": True,
+ "log_env_cpu": True,
+ "project_name": COMET_PROJECT_NAME,}
+ self.default_experiment_kwargs.update(experiment_kwargs)
+ self.experiment = self._get_experiment(self.comet_mode, run_id)
+
+ self.data_dict = self.check_dataset(self.opt.data)
+ self.class_names = self.data_dict["names"]
+ self.num_classes = self.data_dict["nc"]
+
+ self.logged_images_count = 0
+ self.max_images = COMET_MAX_IMAGE_UPLOADS
+
+ if run_id is None:
+ self.experiment.log_other("Created from", "YOLOv5")
+ if not isinstance(self.experiment, comet_ml.OfflineExperiment):
+ workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
+ self.experiment.log_other(
+ "Run Path",
+ f"{workspace}/{project_name}/{experiment_id}",
+ )
+ self.log_parameters(vars(opt))
+ self.log_parameters(self.opt.hyp)
+ self.log_asset_data(
+ self.opt.hyp,
+ name="hyperparameters.json",
+ metadata={"type": "hyp-config-file"},
+ )
+ self.log_asset(
+ f"{self.opt.save_dir}/opt.yaml",
+ metadata={"type": "opt-config-file"},
+ )
+
+ self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
+
+ if hasattr(self.opt, "conf_thres"):
+ self.conf_thres = self.opt.conf_thres
+ else:
+ self.conf_thres = CONF_THRES
+ if hasattr(self.opt, "iou_thres"):
+ self.iou_thres = self.opt.iou_thres
+ else:
+ self.iou_thres = IOU_THRES
+
+ self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
+
+ self.comet_log_predictions = COMET_LOG_PREDICTIONS
+ if self.opt.bbox_interval == -1:
+ self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
+ else:
+ self.comet_log_prediction_interval = self.opt.bbox_interval
+
+ if self.comet_log_predictions:
+ self.metadata_dict = {}
+ self.logged_image_names = []
+
+ self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
+
+ self.experiment.log_others({
+ "comet_mode": COMET_MODE,
+ "comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
+ "comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
+ "comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
+ "comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
+ "comet_model_name": COMET_MODEL_NAME,})
+
+ # Check if running the Experiment with the Comet Optimizer
+ if hasattr(self.opt, "comet_optimizer_id"):
+ self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
+ self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
+ self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
+ self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
+
+ def _get_experiment(self, mode, experiment_id=None):
+ if mode == "offline":
+ if experiment_id is not None:
+ return comet_ml.ExistingOfflineExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.OfflineExperiment(**self.default_experiment_kwargs,)
+
+ else:
+ try:
+ if experiment_id is not None:
+ return comet_ml.ExistingExperiment(
+ previous_experiment=experiment_id,
+ **self.default_experiment_kwargs,
+ )
+
+ return comet_ml.Experiment(**self.default_experiment_kwargs)
+
+ except ValueError:
+ logger.warning("COMET WARNING: "
+ "Comet credentials have not been set. "
+ "Comet will default to offline logging. "
+ "Please set your credentials to enable online logging.")
+ return self._get_experiment("offline", experiment_id)
+
+ return
+
+ def log_metrics(self, log_dict, **kwargs):
+ self.experiment.log_metrics(log_dict, **kwargs)
+
+ def log_parameters(self, log_dict, **kwargs):
+ self.experiment.log_parameters(log_dict, **kwargs)
+
+ def log_asset(self, asset_path, **kwargs):
+ self.experiment.log_asset(asset_path, **kwargs)
+
+ def log_asset_data(self, asset, **kwargs):
+ self.experiment.log_asset_data(asset, **kwargs)
+
+ def log_image(self, img, **kwargs):
+ self.experiment.log_image(img, **kwargs)
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ if not self.save_model:
+ return
+
+ model_metadata = {
+ "fitness_score": fitness_score[-1],
+ "epochs_trained": epoch + 1,
+ "save_period": opt.save_period,
+ "total_epochs": opt.epochs,}
+
+ model_files = glob.glob(f"{path}/*.pt")
+ for model_path in model_files:
+ name = Path(model_path).name
+
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ metadata=model_metadata,
+ overwrite=True,
+ )
+
+ def check_dataset(self, data_file):
+ with open(data_file) as f:
+ data_config = yaml.safe_load(f)
+
+ if data_config['path'].startswith(COMET_PREFIX):
+ path = data_config['path'].replace(COMET_PREFIX, "")
+ data_dict = self.download_dataset_artifact(path)
+
+ return data_dict
+
+ self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
+
+ return check_dataset(data_file)
+
+ def log_predictions(self, image, labelsn, path, shape, predn):
+ if self.logged_images_count >= self.max_images:
+ return
+ detections = predn[predn[:, 4] > self.conf_thres]
+ iou = box_iou(labelsn[:, 1:], detections[:, :4])
+ mask, _ = torch.where(iou > self.iou_thres)
+ if len(mask) == 0:
+ return
+
+ filtered_detections = detections[mask]
+ filtered_labels = labelsn[mask]
+
+ image_id = path.split("/")[-1].split(".")[0]
+ image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
+ if image_name not in self.logged_image_names:
+ native_scale_image = PIL.Image.open(path)
+ self.log_image(native_scale_image, name=image_name)
+ self.logged_image_names.append(image_name)
+
+ metadata = []
+ for cls, *xyxy in filtered_labels.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}-gt",
+ "score": 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+ for *xyxy, conf, cls in filtered_detections.tolist():
+ metadata.append({
+ "label": f"{self.class_names[int(cls)]}",
+ "score": conf * 100,
+ "box": {
+ "x": xyxy[0],
+ "y": xyxy[1],
+ "x2": xyxy[2],
+ "y2": xyxy[3]},})
+
+ self.metadata_dict[image_name] = metadata
+ self.logged_images_count += 1
+
+ return
+
+ def preprocess_prediction(self, image, labels, shape, pred):
+ nl, _ = labels.shape[0], pred.shape[0]
+
+ # Predictions
+ if self.opt.single_cls:
+ pred[:, 5] = 0
+
+ predn = pred.clone()
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
+
+ labelsn = None
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
+
+ return predn, labelsn
+
+ def add_assets_to_artifact(self, artifact, path, asset_path, split):
+ img_paths = sorted(glob.glob(f"{asset_path}/*"))
+ label_paths = img2label_paths(img_paths)
+
+ for image_file, label_file in zip(img_paths, label_paths):
+ image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
+
+ try:
+ artifact.add(image_file, logical_path=image_logical_path, metadata={"split": split})
+ artifact.add(label_file, logical_path=label_logical_path, metadata={"split": split})
+ except ValueError as e:
+ logger.error('COMET ERROR: Error adding file to Artifact. Skipping file.')
+ logger.error(f"COMET ERROR: {e}")
+ continue
+
+ return artifact
+
+ def upload_dataset_artifact(self):
+ dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
+ path = str((ROOT / Path(self.data_dict["path"])).resolve())
+
+ metadata = self.data_dict.copy()
+ for key in ["train", "val", "test"]:
+ split_path = metadata.get(key)
+ if split_path is not None:
+ metadata[key] = split_path.replace(path, "")
+
+ artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
+ for key in metadata.keys():
+ if key in ["train", "val", "test"]:
+ if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
+ continue
+
+ asset_path = self.data_dict.get(key)
+ if asset_path is not None:
+ artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
+
+ self.experiment.log_artifact(artifact)
+
+ return
+
+ def download_dataset_artifact(self, artifact_path):
+ logged_artifact = self.experiment.get_artifact(artifact_path)
+ artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
+ logged_artifact.download(artifact_save_dir)
+
+ metadata = logged_artifact.metadata
+ data_dict = metadata.copy()
+ data_dict["path"] = artifact_save_dir
+
+ metadata_names = metadata.get("names")
+ if type(metadata_names) == dict:
+ data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
+ elif type(metadata_names) == list:
+ data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
+ else:
+ raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
+
+ data_dict = self.update_data_paths(data_dict)
+ return data_dict
+
+ def update_data_paths(self, data_dict):
+ path = data_dict.get("path", "")
+
+ for split in ["train", "val", "test"]:
+ if data_dict.get(split):
+ split_path = data_dict.get(split)
+ data_dict[split] = (f"{path}/{split_path}" if isinstance(split, str) else [
+ f"{path}/{x}" for x in split_path])
+
+ return data_dict
+
+ def on_pretrain_routine_end(self, paths):
+ if self.opt.resume:
+ return
+
+ for path in paths:
+ self.log_asset(str(path))
+
+ if self.upload_dataset:
+ if not self.resume:
+ self.upload_dataset_artifact()
+
+ return
+
+ def on_train_start(self):
+ self.log_parameters(self.hyp)
+
+ def on_train_epoch_start(self):
+ return
+
+ def on_train_epoch_end(self, epoch):
+ self.experiment.curr_epoch = epoch
+
+ return
+
+ def on_train_batch_start(self):
+ return
+
+ def on_train_batch_end(self, log_dict, step):
+ self.experiment.curr_step = step
+ if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
+ self.log_metrics(log_dict, step=step)
+
+ return
+
+ def on_train_end(self, files, save_dir, last, best, epoch, results):
+ if self.comet_log_predictions:
+ curr_epoch = self.experiment.curr_epoch
+ self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
+
+ for f in files:
+ self.log_asset(f, metadata={"epoch": epoch})
+ self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
+
+ if not self.opt.evolve:
+ model_path = str(best if best.exists() else last)
+ name = Path(model_path).name
+ if self.save_model:
+ self.experiment.log_model(
+ self.model_name,
+ file_or_folder=model_path,
+ file_name=name,
+ overwrite=True,
+ )
+
+ # Check if running Experiment with Comet Optimizer
+ if hasattr(self.opt, 'comet_optimizer_id'):
+ metric = results.get(self.opt.comet_optimizer_metric)
+ self.experiment.log_other('optimizer_metric_value', metric)
+
+ self.finish_run()
+
+ def on_val_start(self):
+ return
+
+ def on_val_batch_start(self):
+ return
+
+ def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
+ if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
+ return
+
+ for si, pred in enumerate(outputs):
+ if len(pred) == 0:
+ continue
+
+ image = images[si]
+ labels = targets[targets[:, 0] == si, 1:]
+ shape = shapes[si]
+ path = paths[si]
+ predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
+ if labelsn is not None:
+ self.log_predictions(image, labelsn, path, shape, predn)
+
+ return
+
+ def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
+ if self.comet_log_per_class_metrics:
+ if self.num_classes > 1:
+ for i, c in enumerate(ap_class):
+ class_name = self.class_names[c]
+ self.experiment.log_metrics(
+ {
+ 'mAP@.5': ap50[i],
+ 'mAP@.5:.95': ap[i],
+ 'precision': p[i],
+ 'recall': r[i],
+ 'f1': f1[i],
+ 'true_positives': tp[i],
+ 'false_positives': fp[i],
+ 'support': nt[c]},
+ prefix=class_name)
+
+ if self.comet_log_confusion_matrix:
+ epoch = self.experiment.curr_epoch
+ class_names = list(self.class_names.values())
+ class_names.append("background")
+ num_classes = len(class_names)
+
+ self.experiment.log_confusion_matrix(
+ matrix=confusion_matrix.matrix,
+ max_categories=num_classes,
+ labels=class_names,
+ epoch=epoch,
+ column_label='Actual Category',
+ row_label='Predicted Category',
+ file_name=f"confusion-matrix-epoch-{epoch}.json",
+ )
+
+ def on_fit_epoch_end(self, result, epoch):
+ self.log_metrics(result, epoch=epoch)
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ def on_params_update(self, params):
+ self.log_parameters(params)
+
+ def finish_run(self):
+ self.experiment.end()
diff --git a/utils/loggers/comet/comet_utils.py b/utils/loggers/comet/comet_utils.py
new file mode 100644
index 000000000000..3cbd45156b57
--- /dev/null
+++ b/utils/loggers/comet/comet_utils.py
@@ -0,0 +1,150 @@
+import logging
+import os
+from urllib.parse import urlparse
+
+try:
+ import comet_ml
+except (ModuleNotFoundError, ImportError):
+ comet_ml = None
+
+import yaml
+
+logger = logging.getLogger(__name__)
+
+COMET_PREFIX = "comet://"
+COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
+COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
+
+
+def download_model_checkpoint(opt, experiment):
+ model_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(model_dir, exist_ok=True)
+
+ model_name = COMET_MODEL_NAME
+ model_asset_list = experiment.get_model_asset_list(model_name)
+
+ if len(model_asset_list) == 0:
+ logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
+ return
+
+ model_asset_list = sorted(
+ model_asset_list,
+ key=lambda x: x["step"],
+ reverse=True,
+ )
+ logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
+
+ resource_url = urlparse(opt.weights)
+ checkpoint_filename = resource_url.query
+
+ if checkpoint_filename:
+ asset_id = logged_checkpoint_map.get(checkpoint_filename)
+ else:
+ asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
+ checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
+
+ if asset_id is None:
+ logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
+ return
+
+ try:
+ logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
+ asset_filename = checkpoint_filename
+
+ model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ model_download_path = f"{model_dir}/{asset_filename}"
+ with open(model_download_path, "wb") as f:
+ f.write(model_binary)
+
+ opt.weights = model_download_path
+
+ except Exception as e:
+ logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
+ logger.exception(e)
+
+
+def set_opt_parameters(opt, experiment):
+ """Update the opts Namespace with parameters
+ from Comet's ExistingExperiment when resuming a run
+
+ Args:
+ opt (argparse.Namespace): Namespace of command line options
+ experiment (comet_ml.APIExperiment): Comet API Experiment object
+ """
+ asset_list = experiment.get_asset_list()
+ resume_string = opt.resume
+
+ for asset in asset_list:
+ if asset["fileName"] == "opt.yaml":
+ asset_id = asset["assetId"]
+ asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
+ opt_dict = yaml.safe_load(asset_binary)
+ for key, value in opt_dict.items():
+ setattr(opt, key, value)
+ opt.resume = resume_string
+
+ # Save hyperparameters to YAML file
+ # Necessary to pass checks in training script
+ save_dir = f"{opt.project}/{experiment.name}"
+ os.makedirs(save_dir, exist_ok=True)
+
+ hyp_yaml_path = f"{save_dir}/hyp.yaml"
+ with open(hyp_yaml_path, "w") as f:
+ yaml.dump(opt.hyp, f)
+ opt.hyp = hyp_yaml_path
+
+
+def check_comet_weights(opt):
+ """Downloads model weights from Comet and updates the
+ weights path to point to saved weights location
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if weights are successfully downloaded
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.weights, str):
+ if opt.weights.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.weights)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ download_model_checkpoint(opt, experiment)
+ return True
+
+ return None
+
+
+def check_comet_resume(opt):
+ """Restores run parameters to its original state based on the model checkpoint
+ and logged Experiment parameters.
+
+ Args:
+ opt (argparse.Namespace): Command Line arguments passed
+ to YOLOv5 training script
+
+ Returns:
+ None/bool: Return True if the run is restored successfully
+ else return None
+ """
+ if comet_ml is None:
+ return
+
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(COMET_PREFIX):
+ api = comet_ml.API()
+ resource = urlparse(opt.resume)
+ experiment_path = f"{resource.netloc}{resource.path}"
+ experiment = api.get(experiment_path)
+ set_opt_parameters(opt, experiment)
+ download_model_checkpoint(opt, experiment)
+
+ return True
+
+ return None
diff --git a/utils/loggers/comet/hpo.py b/utils/loggers/comet/hpo.py
new file mode 100644
index 000000000000..7dd5c92e8de1
--- /dev/null
+++ b/utils/loggers/comet/hpo.py
@@ -0,0 +1,118 @@
+import argparse
+import json
+import logging
+import os
+import sys
+from pathlib import Path
+
+import comet_ml
+
+logger = logging.getLogger(__name__)
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+# Project Configuration
+config = comet_ml.config.get_config()
+COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
+
+
+def get_args(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ # Comet Arguments
+ parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
+ parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
+ parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
+ parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
+ parser.add_argument("--comet_optimizer_workers",
+ type=int,
+ default=1,
+ help="Comet: Number of Parallel Workers to use with the Comet Optimizer.")
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def run(parameters, opt):
+ hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
+
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.batch_size = parameters.get("batch_size")
+ opt.epochs = parameters.get("epochs")
+
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ opt = get_args(known=True)
+
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.project = str(opt.project)
+
+ optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
+ if optimizer_id is None:
+ with open(opt.comet_optimizer_config) as f:
+ optimizer_config = json.load(f)
+ optimizer = comet_ml.Optimizer(optimizer_config)
+ else:
+ optimizer = comet_ml.Optimizer(optimizer_id)
+
+ opt.comet_optimizer_id = optimizer.id
+ status = optimizer.status()
+
+ opt.comet_optimizer_objective = status["spec"]["objective"]
+ opt.comet_optimizer_metric = status["spec"]["metric"]
+
+ logger.info("COMET INFO: Starting Hyperparameter Sweep")
+ for parameter in optimizer.get_parameters():
+ run(parameter["parameters"], opt)
diff --git a/utils/loggers/comet/optimizer_config.json b/utils/loggers/comet/optimizer_config.json
new file mode 100644
index 000000000000..83ddddab6f20
--- /dev/null
+++ b/utils/loggers/comet/optimizer_config.json
@@ -0,0 +1,209 @@
+{
+ "algorithm": "random",
+ "parameters": {
+ "anchor_t": {
+ "type": "discrete",
+ "values": [
+ 2,
+ 8
+ ]
+ },
+ "batch_size": {
+ "type": "discrete",
+ "values": [
+ 16,
+ 32,
+ 64
+ ]
+ },
+ "box": {
+ "type": "discrete",
+ "values": [
+ 0.02,
+ 0.2
+ ]
+ },
+ "cls": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "cls_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "copy_paste": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "degrees": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 45
+ ]
+ },
+ "epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "fl_gamma": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "fliplr": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "flipud": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_h": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_s": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "hsv_v": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "iou_t": {
+ "type": "discrete",
+ "values": [
+ 0.7
+ ]
+ },
+ "lr0": {
+ "type": "discrete",
+ "values": [
+ 1e-05,
+ 0.1
+ ]
+ },
+ "lrf": {
+ "type": "discrete",
+ "values": [
+ 0.01,
+ 1
+ ]
+ },
+ "mixup": {
+ "type": "discrete",
+ "values": [
+ 1
+ ]
+ },
+ "momentum": {
+ "type": "discrete",
+ "values": [
+ 0.6
+ ]
+ },
+ "mosaic": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "obj": {
+ "type": "discrete",
+ "values": [
+ 0.2
+ ]
+ },
+ "obj_pw": {
+ "type": "discrete",
+ "values": [
+ 0.5
+ ]
+ },
+ "optimizer": {
+ "type": "categorical",
+ "values": [
+ "SGD",
+ "Adam",
+ "AdamW"
+ ]
+ },
+ "perspective": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "scale": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "shear": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "translate": {
+ "type": "discrete",
+ "values": [
+ 0
+ ]
+ },
+ "warmup_bias_lr": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.2
+ ]
+ },
+ "warmup_epochs": {
+ "type": "discrete",
+ "values": [
+ 5
+ ]
+ },
+ "warmup_momentum": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.95
+ ]
+ },
+ "weight_decay": {
+ "type": "discrete",
+ "values": [
+ 0,
+ 0.001
+ ]
+ }
+ },
+ "spec": {
+ "maxCombo": 0,
+ "metric": "metrics/mAP_0.5",
+ "objective": "maximize"
+ },
+ "trials": 1
+}
diff --git a/utils/loggers/wandb/README.md b/utils/loggers/wandb/README.md
index 63d999859e6d..d78324b4c8e9 100644
--- a/utils/loggers/wandb/README.md
+++ b/utils/loggers/wandb/README.md
@@ -1,66 +1,72 @@
📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
-* [About Weights & Biases](#about-weights-&-biases)
-* [First-Time Setup](#first-time-setup)
-* [Viewing runs](#viewing-runs)
-* [Disabling wandb](#disabling-wandb)
-* [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
-* [Reports: Share your work with the world!](#reports)
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
## About Weights & Biases
+
Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
- * [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
- * [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
- * [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
- * [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
- * [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
- * [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
## First-Time Setup
+
 -
-
-
- 
$ python train.py --upload_data val
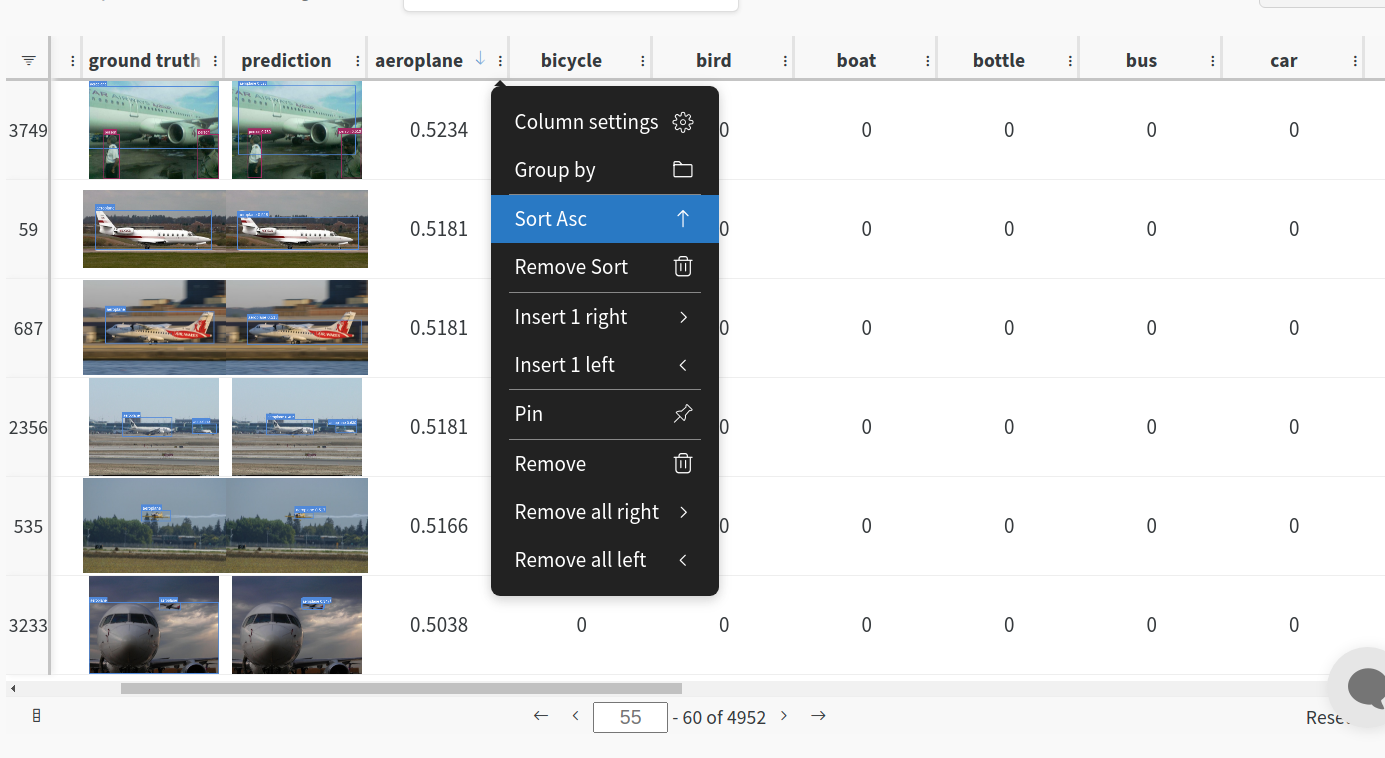
- {dataset}_wandb.yaml file which can be used to train from dataset artifact.
$ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
- 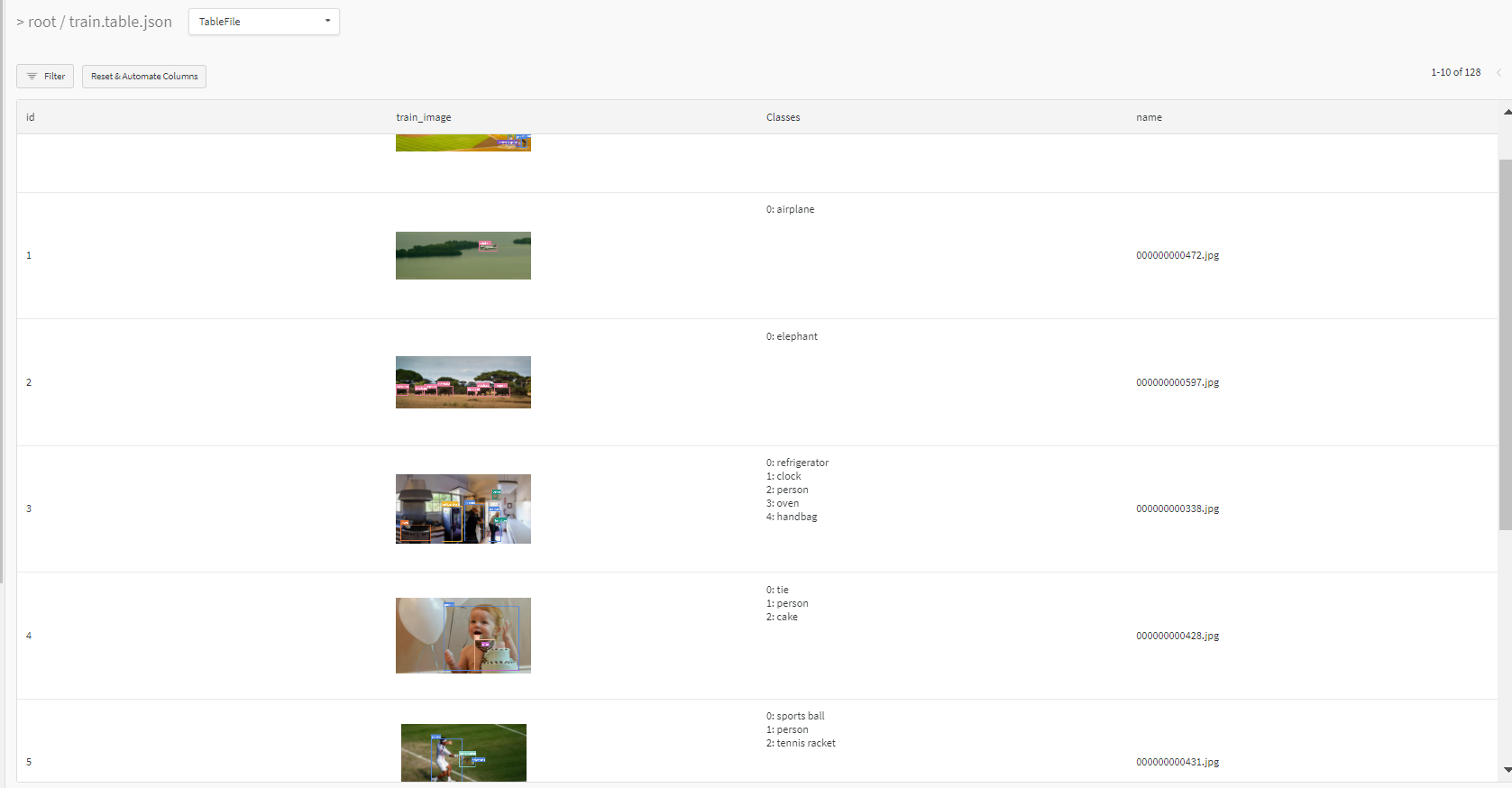
- $ python train.py --data {data}_wandb.yaml
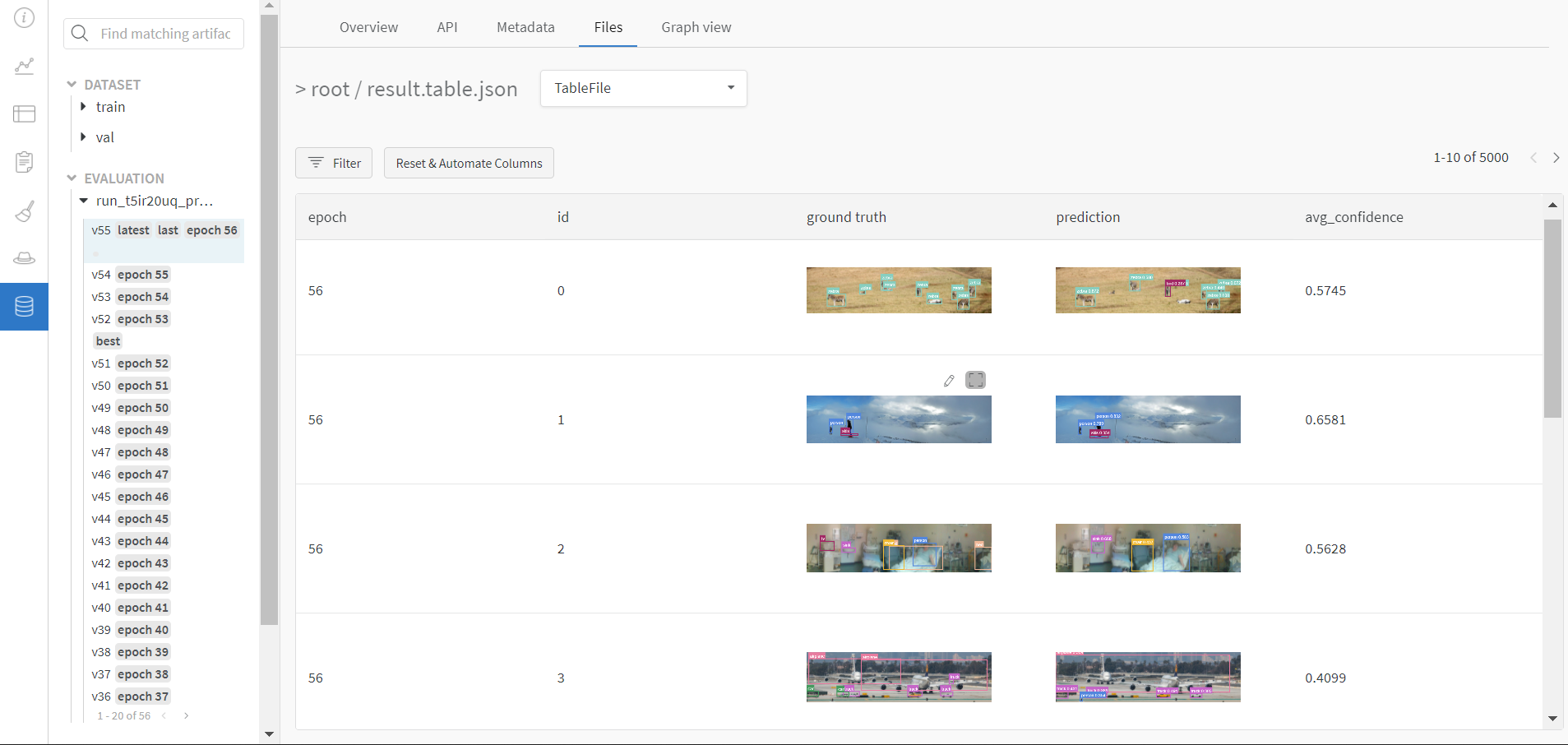
- $ python train.py --save_period 1
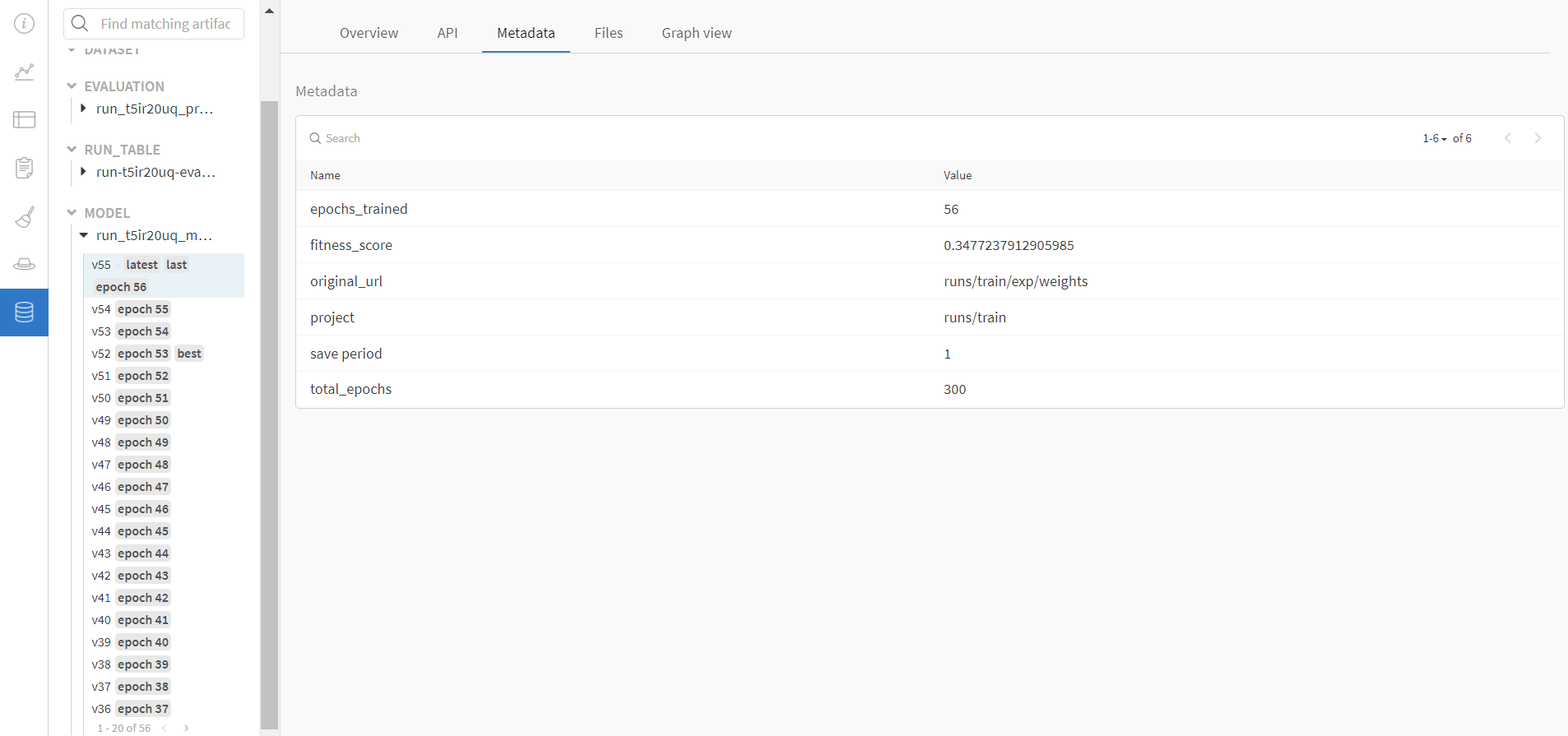
- --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
- $ python train.py --resume wandb-artifact://{run_path}

- --upload_dataset or
train from _wandb.yaml file and set --save_period
- $ python train.py --resume wandb-artifact://{run_path}

-  -
## Environments
YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
@@ -144,9 +155,8 @@ YOLOv5 may be run in any of the following up-to-date verified environments (with
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status

-If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/utils/loggers/wandb/sweep.py b/utils/loggers/wandb/sweep.py
index 206059bc30bf..d49ea6f2778b 100644
--- a/utils/loggers/wandb/sweep.py
+++ b/utils/loggers/wandb/sweep.py
@@ -16,8 +16,8 @@
def sweep():
wandb.init()
- # Get hyp dict from sweep agent
- hyp_dict = vars(wandb.config).get("_items")
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
# Workaround: get necessary opt args
opt = parse_opt(known=True)
diff --git a/utils/loggers/wandb/sweep.yaml b/utils/loggers/wandb/sweep.yaml
index c7790d75f6b2..688b1ea0285f 100644
--- a/utils/loggers/wandb/sweep.yaml
+++ b/utils/loggers/wandb/sweep.yaml
@@ -88,7 +88,7 @@ parameters:
fl_gamma:
distribution: uniform
min: 0.0
- max: 0.1
+ max: 4.0
hsv_h:
distribution: uniform
min: 0.0
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
index 221d3c88c56e..238f4edbf2a0 100644
--- a/utils/loggers/wandb/wandb_utils.py
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -15,7 +15,7 @@
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
-from utils.datasets import LoadImagesAndLabels, img2label_paths
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
from utils.general import LOGGER, check_dataset, check_file
try:
@@ -43,13 +43,16 @@ def check_wandb_config_file(data_config_file):
def check_wandb_dataset(data_file):
is_trainset_wandb_artifact = False
is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
if check_file(data_file) and data_file.endswith('.yaml'):
with open(data_file, errors='ignore') as f:
data_dict = yaml.safe_load(f)
- is_trainset_wandb_artifact = (isinstance(data_dict['train'], str) and
- data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX))
- is_valset_wandb_artifact = (isinstance(data_dict['val'], str) and
- data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX))
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
if is_trainset_wandb_artifact or is_valset_wandb_artifact:
return data_dict
else:
@@ -121,7 +124,7 @@ def __init__(self, opt, run_id=None, job_type='Training'):
"""
- Initialize WandbLogger instance
- Upload dataset if opt.upload_dataset is True
- - Setup trainig processes if job_type is 'Training'
+ - Setup training processes if job_type is 'Training'
arguments:
opt (namespace) -- Commandline arguments for this run
@@ -129,6 +132,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
job_type (str) -- To set the job_type for this run
"""
+ # Temporary-fix
+ if opt.upload_dataset:
+ opt.upload_dataset = False
+ # LOGGER.info("Uploading Dataset functionality is not being supported temporarily due to a bug.")
+
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
@@ -170,7 +178,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
if not opt.resume:
self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
- if opt.resume:
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
# resume from artifact
if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
self.data_dict = dict(self.wandb_run.config.data_dict)
@@ -181,8 +193,7 @@ def __init__(self, opt, run_id=None, job_type='Training'):
self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
# write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
- self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict},
- allow_val_change=True)
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
self.setup_training(opt)
if self.job_type == 'Dataset Creation':
@@ -200,8 +211,7 @@ def check_and_upload_dataset(self, opt):
Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
"""
assert wandb, 'Install wandb to upload dataset'
- config_path = self.log_dataset_artifact(opt.data,
- opt.single_cls,
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
with open(config_path, errors='ignore') as f:
wandb_data_dict = yaml.safe_load(f)
@@ -225,15 +235,15 @@ def setup_training(self, opt):
if modeldir:
self.weights = Path(modeldir) / "last.pt"
config = self.wandb_run.config
- opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
- self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \
- config.hyp
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
data_dict = self.data_dict
if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
- self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
- opt.artifact_alias)
- self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
- opt.artifact_alias)
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
if self.train_artifact_path is not None:
train_path = Path(self.train_artifact_path) / 'data/images/'
@@ -252,6 +262,8 @@ def setup_training(self, opt):
self.map_val_table_path()
if opt.bbox_interval == -1:
self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
# Update the the data_dict to point to local artifacts dir
if train_from_artifact:
@@ -288,7 +300,7 @@ def download_model_artifact(self, opt):
model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
modeldir = model_artifact.download()
- epochs_trained = model_artifact.metadata.get('epochs_trained')
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
total_epochs = model_artifact.metadata.get('total_epochs')
is_finished = total_epochs is None
assert not is_finished, 'training is finished, can only resume incomplete runs.'
@@ -306,14 +318,15 @@ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
fitness_score (float) -- fitness score for current epoch
best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
"""
- model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
- 'original_url': str(path),
- 'epochs_trained': epoch + 1,
- 'save period': opt.save_period,
- 'project': opt.project,
- 'total_epochs': opt.epochs,
- 'fitness_score': fitness_score
- })
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
wandb.log_artifact(model_artifact,
aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
@@ -342,13 +355,14 @@ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=
# log train set
if not log_val_only:
- self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
- data['train'], rect=True, batch_size=1), names, name='train') if data.get('train') else None
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
if data.get('train'):
data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
- self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
- data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
if data.get('val'):
data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
@@ -356,7 +370,7 @@ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=
# create a _wandb.yaml file with artifacts links if both train and test set are logged
if not log_val_only:
path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
- path = Path('data') / path
+ path = ROOT / 'data' / path
data.pop('download', None)
data.pop('path', None)
with open(path, 'w') as f:
@@ -401,7 +415,7 @@ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[i
# TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
artifact = wandb.Artifact(name=name, type="dataset")
img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
- img_files = tqdm(dataset.img_files) if not img_files else img_files
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
for img_file in img_files:
if Path(img_file).is_dir():
artifact.add_dir(img_file, name='data/images')
@@ -410,17 +424,21 @@ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[i
else:
artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
label_file = Path(img2label_paths([img_file])[0])
- artifact.add_file(str(label_file),
- name='data/labels/' + label_file.name) if label_file.exists() else None
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
box_data, img_classes = [], {}
for cls, *xywh in labels[:, 1:].tolist():
cls = int(cls)
- box_data.append({"position": {"middle": [xywh[0], xywh[1]], "width": xywh[2], "height": xywh[3]},
- "class_id": cls,
- "box_caption": "%s" % (class_to_id[cls])})
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
img_classes[cls] = class_to_id[cls]
boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
@@ -444,12 +462,17 @@ def log_training_progress(self, predn, path, names):
for *xyxy, conf, cls in predn.tolist():
if conf >= 0.25:
cls = int(cls)
- box_data.append(
- {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
- "class_id": cls,
- "box_caption": f"{names[cls]} {conf:.3f}",
- "scores": {"class_score": conf},
- "domain": "pixel"})
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
avg_conf_per_class[cls] += conf
if cls in pred_class_count:
@@ -462,12 +485,9 @@ def log_training_progress(self, predn, path, names):
boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
id = self.val_table_path_map[Path(path).name]
- self.result_table.add_data(self.current_epoch,
- id,
- self.val_table.data[id][1],
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
- *avg_conf_per_class
- )
+ *avg_conf_per_class)
def val_one_image(self, pred, predn, path, names, im):
"""
@@ -483,11 +503,17 @@ def val_one_image(self, pred, predn, path, names, im):
if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
if self.current_epoch % self.bbox_interval == 0:
- box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
- "class_id": int(cls),
- "box_caption": f"{names[cls]} {conf:.3f}",
- "scores": {"class_score": conf},
- "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
@@ -517,7 +543,8 @@ def end_epoch(self, best_result=False):
wandb.log(self.log_dict)
except BaseException as e:
LOGGER.info(
- f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}")
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
self.wandb_run.finish()
self.wandb_run = None
@@ -525,8 +552,10 @@ def end_epoch(self, best_result=False):
self.bbox_media_panel_images = []
if self.result_artifact:
self.result_artifact.add(self.result_table, 'result')
- wandb.log_artifact(self.result_artifact, aliases=['latest', 'last', 'epoch ' + str(self.current_epoch),
- ('best' if best_result else '')])
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
wandb.log({"evaluation": self.result_table})
columns = ["epoch", "id", "ground truth", "prediction"]
diff --git a/utils/loss.py b/utils/loss.py
index 5aa9f017d2af..9b9c3d9f8018 100644
--- a/utils/loss.py
+++ b/utils/loss.py
@@ -89,9 +89,10 @@ def forward(self, pred, true):
class ComputeLoss:
+ sort_obj_iou = False
+
# Compute losses
def __init__(self, model, autobalance=False):
- self.sort_obj_iou = False
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
@@ -107,46 +108,53 @@ def __init__(self, model, autobalance=False):
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
- det = de_parallel(model).model[-1] # Detect() module
- self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
- self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
- for k in 'na', 'nc', 'nl', 'anchors':
- setattr(self, k, getattr(det, k))
-
- def __call__(self, p, targets): # predictions, targets, model
- device = targets.device
- lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
- tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
- ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
# Regression
- pxy = ps[:, :2].sigmoid() * 2 - 0.5
- pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
- iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
- score_iou = iou.detach().clamp(0).type(tobj.dtype)
+ iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
- sort_id = torch.argsort(score_iou)
- b, a, gj, gi, score_iou = b[sort_id], a[sort_id], gj[sort_id], gi[sort_id], score_iou[sort_id]
- tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * score_iou # iou ratio
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
- t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
- lcls += self.BCEcls(ps[:, 5:], t) # BCE
+ lcls += self.BCEcls(pcls, t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
@@ -170,25 +178,31 @@ def build_targets(self, p, targets):
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
- gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
- ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
- targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
g = 0.5 # bias
- off = torch.tensor([[0, 0],
- [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
- # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
- ], device=targets.device).float() * g # offsets
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
for i in range(self.nl):
- anchors = self.anchors[i]
- gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
- t = targets * gain
+ t = targets * gain # shape(3,n,7)
if nt:
# Matches
- r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
@@ -206,15 +220,13 @@ def build_targets(self, p, targets):
offsets = 0
# Define
- b, c = t[:, :2].long().T # image, class
- gxy = t[:, 2:4] # grid xy
- gwh = t[:, 4:6] # grid wh
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
- gi, gj = gij.T # grid xy indices
+ gi, gj = gij.T # grid indices
# Append
- a = t[:, 6].long() # anchor indices
- indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
diff --git a/utils/metrics.py b/utils/metrics.py
index 83defa7fd186..f0bc787e1518 100644
--- a/utils/metrics.py
+++ b/utils/metrics.py
@@ -11,6 +11,8 @@
import numpy as np
import torch
+from utils import TryExcept, threaded
+
def fitness(x):
# Model fitness as a weighted combination of metrics
@@ -18,7 +20,15 @@ def fitness(x):
return (x[:, :4] * w).sum(1)
-def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
@@ -47,43 +57,42 @@ def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names
i = pred_cls == c
n_l = nt[ci] # number of labels
n_p = i.sum() # number of predictions
-
if n_p == 0 or n_l == 0:
continue
- else:
- # Accumulate FPs and TPs
- fpc = (1 - tp[i]).cumsum(0)
- tpc = tp[i].cumsum(0)
- # Recall
- recall = tpc / (n_l + eps) # recall curve
- r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
- # Precision
- precision = tpc / (tpc + fpc) # precision curve
- p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
- # AP from recall-precision curve
- for j in range(tp.shape[1]):
- ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
- if plot and j == 0:
- py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
# Compute F1 (harmonic mean of precision and recall)
f1 = 2 * p * r / (p + r + eps)
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
- names = {i: v for i, v in enumerate(names)} # to dict
+ names = dict(enumerate(names)) # to dict
if plot:
- plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
- plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
- plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
- plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
- i = f1.mean(0).argmax() # max F1 index
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
tp = (r * nt).round() # true positives
fp = (tp / (p + eps) - tp).round() # false positives
- return tp, fp, p, r, f1, ap, unique_classes.astype('int32')
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
def compute_ap(recall, precision):
@@ -132,6 +141,12 @@ def process_batch(self, detections, labels):
Returns:
None, updates confusion matrix accordingly
"""
+ if detections is None:
+ gt_classes = labels.int()
+ for gc in gt_classes:
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
detections = detections[detections[:, 4] > self.conf]
gt_classes = labels[:, 0].int()
detection_classes = detections[:, 5].int()
@@ -149,18 +164,18 @@ def process_batch(self, detections, labels):
matches = np.zeros((0, 3))
n = matches.shape[0] > 0
- m0, m1, _ = matches.transpose().astype(np.int16)
+ m0, m1, _ = matches.transpose().astype(int)
for i, gc in enumerate(gt_classes):
j = m0 == i
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
- self.matrix[self.nc, gc] += 1 # background FP
+ self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
- self.matrix[dc, self.nc] += 1 # background FN
+ self.matrix[dc, self.nc] += 1 # predicted background
def matrix(self):
return self.matrix
@@ -171,66 +186,74 @@ def tp_fp(self):
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
+ @TryExcept('WARNING ⚠️ ConfusionMatrix plot failure')
def plot(self, normalize=True, save_dir='', names=()):
- try:
- import seaborn as sn
-
- array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-6) if normalize else 1) # normalize columns
- array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
-
- fig = plt.figure(figsize=(12, 9), tight_layout=True)
- sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
- labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
- with warnings.catch_warnings():
- warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
- sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
- xticklabels=names + ['background FP'] if labels else "auto",
- yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
- fig.axes[0].set_xlabel('True')
- fig.axes[0].set_ylabel('Predicted')
- fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
- plt.close()
- except Exception as e:
- print(f'WARNING: ConfusionMatrix plot failure: {e}')
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ ticklabels = (names + ['background']) if labels else "auto"
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=ticklabels,
+ yticklabels=ticklabels).set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
def print(self):
for i in range(self.nc + 1):
print(' '.join(map(str, self.matrix[i])))
-def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
- # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
- box2 = box2.T
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
- if x1y1x2y2: # x1, y1, x2, y2 = box1
- b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
- b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
- else: # transform from xywh to xyxy
- b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
- b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
- b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
- b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
- w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
- w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
+ # IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
- rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
- (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
- v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
@@ -239,7 +262,13 @@ def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
-def box_iou(box1, box2):
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
@@ -252,30 +281,24 @@ def box_iou(box1, box2):
IoU values for every element in boxes1 and boxes2
"""
- def box_area(box):
- # box = 4xn
- return (box[2] - box[0]) * (box[3] - box[1])
-
- area1 = box_area(box1.T)
- area2 = box_area(box2.T)
-
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
- inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
- return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
-def bbox_ioa(box1, box2, eps=1E-7):
+
+def bbox_ioa(box1, box2, eps=1e-7):
""" Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
box1: np.array of shape(4)
box2: np.array of shape(nx4)
returns: np.array of shape(n)
"""
- box2 = box2.transpose()
-
# Get the coordinates of bounding boxes
- b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
- b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
# Intersection area
inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
@@ -288,17 +311,19 @@ def bbox_ioa(box1, box2, eps=1E-7):
return inter_area / box2_area
-def wh_iou(wh1, wh2):
+def wh_iou(wh1, wh2, eps=1e-7):
# Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
inter = torch.min(wh1, wh2).prod(2) # [N,M]
- return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
# Plots ----------------------------------------------------------------------------------------------------------------
-def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+
+@threaded
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
# Precision-recall curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
py = np.stack(py, axis=1)
@@ -314,12 +339,14 @@ def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
ax.set_ylabel('Precision')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- fig.savefig(Path(save_dir), dpi=250)
- plt.close()
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
-def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+@threaded
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
# Metric-confidence curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -329,12 +356,13 @@ def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence'
else:
ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
- y = py.mean(0)
+ y = smooth(py.mean(0), 0.05)
ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- fig.savefig(Path(save_dir), dpi=250)
- plt.close()
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
diff --git a/utils/plots.py b/utils/plots.py
index 74868403edc0..36df271c60e1 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -3,10 +3,12 @@
Plotting utils
"""
+import contextlib
import math
import os
from copy import copy
from pathlib import Path
+from urllib.error import URLError
import cv2
import matplotlib
@@ -17,12 +19,13 @@
import torch
from PIL import Image, ImageDraw, ImageFont
-from utils.general import (LOGGER, Timeout, check_requirements, clip_coords, increment_path, is_ascii, is_chinese,
- try_except, user_config_dir, xywh2xyxy, xyxy2xywh)
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_boxes, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
from utils.metrics import fitness
+from utils.segment.general import scale_image
# Settings
-CONFIG_DIR = user_config_dir() # Ultralytics settings dir
RANK = int(os.getenv('RANK', -1))
matplotlib.rc('font', **{'size': 11})
matplotlib.use('Agg') # for writing to files only
@@ -32,9 +35,9 @@ class Colors:
# Ultralytics color palette https://ultralytics.com/
def __init__(self):
# hex = matplotlib.colors.TABLEAU_COLORS.values()
- hex = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
- '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
- self.palette = [self.hex2rgb('#' + c) for c in hex]
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
self.n = len(self.palette)
def __call__(self, i, bgr=False):
@@ -49,35 +52,33 @@ def hex2rgb(h): # rgb order (PIL)
colors = Colors() # create instance for 'from utils.plots import colors'
-def check_font(font='Arial.ttf', size=10):
+def check_pil_font(font=FONT, size=10):
# Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
font = Path(font)
font = font if font.exists() else (CONFIG_DIR / font.name)
try:
return ImageFont.truetype(str(font) if font.exists() else font.name, size)
- except Exception as e: # download if missing
- url = "https://ultralytics.com/assets/" + font.name
- LOGGER.info(f'Downloading {url} to {font}...')
- torch.hub.download_url_to_file(url, str(font), progress=False)
+ except Exception: # download if missing
try:
+ check_font(font)
return ImageFont.truetype(str(font), size)
except TypeError:
check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
class Annotator:
- if RANK in (-1, 0):
- check_font() # download TTF if necessary
-
# YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
- self.pil = pil or not is_ascii(example) or is_chinese(example)
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
if self.pil: # use PIL
self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
self.draw = ImageDraw.Draw(self.im)
- self.font = check_font(font='Arial.Unicode.ttf' if is_chinese(example) else font,
- size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
else: # use cv2
self.im = im
self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
@@ -89,10 +90,11 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if label:
w, h = self.font.getsize(label) # text width, height
outside = box[1] - h >= 0 # label fits outside box
- self.draw.rectangle([box[0],
- box[1] - h if outside else box[1],
- box[0] + w + 1,
- box[1] + 1 if outside else box[1] + h + 1], fill=color)
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
# self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
else: # cv2
@@ -101,20 +103,78 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if label:
tf = max(self.lw - 1, 1) # font thickness
w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
- outside = p1[1] - h - 3 >= 0 # label fits outside box
+ outside = p1[1] - h >= 3
p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
- cv2.putText(self.im, label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2), 0, self.lw / 3, txt_color,
- thickness=tf, lineType=cv2.LINE_AA)
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def masks(self, masks, colors, im_gpu=None, alpha=0.5):
+ """Plot masks at once.
+ Args:
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ im_gpu (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ alpha (float): mask transparency: 0.0 fully transparent, 1.0 opaque
+ """
+ if self.pil:
+ # convert to numpy first
+ self.im = np.asarray(self.im).copy()
+ if im_gpu is None:
+ # Add multiple masks of shape(h,w,n) with colors list([r,g,b], [r,g,b], ...)
+ if len(masks) == 0:
+ return
+ if isinstance(masks, torch.Tensor):
+ masks = torch.as_tensor(masks, dtype=torch.uint8)
+ masks = masks.permute(1, 2, 0).contiguous()
+ masks = masks.cpu().numpy()
+ # masks = np.ascontiguousarray(masks.transpose(1, 2, 0))
+ masks = scale_image(masks.shape[:2], masks, self.im.shape)
+ masks = np.asarray(masks, dtype=np.float32)
+ colors = np.asarray(colors, dtype=np.float32) # shape(n,3)
+ s = masks.sum(2, keepdims=True).clip(0, 1) # add all masks together
+ masks = (masks @ colors).clip(0, 255) # (h,w,n) @ (n,3) = (h,w,3)
+ self.im[:] = masks * alpha + self.im * (1 - s * alpha)
+ else:
+ if len(masks) == 0:
+ self.im[:] = im_gpu.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+ colors = torch.tensor(colors, device=im_gpu.device, dtype=torch.float32) / 255.0
+ colors = colors[:, None, None] # shape(n,1,1,3)
+ masks = masks.unsqueeze(3) # shape(n,h,w,1)
+ masks_color = masks * (colors * alpha) # shape(n,h,w,3)
+
+ inv_alph_masks = (1 - masks * alpha).cumprod(0) # shape(n,h,w,1)
+ mcs = (masks_color * inv_alph_masks).sum(0) * 2 # mask color summand shape(n,h,w,3)
+
+ im_gpu = im_gpu.flip(dims=[0]) # flip channel
+ im_gpu = im_gpu.permute(1, 2, 0).contiguous() # shape(h,w,3)
+ im_gpu = im_gpu * inv_alph_masks[-1] + mcs
+ im_mask = (im_gpu * 255).byte().cpu().numpy()
+ self.im[:] = scale_image(im_gpu.shape, im_mask, self.im.shape)
+ if self.pil:
+ # convert im back to PIL and update draw
+ self.fromarray(self.im)
def rectangle(self, xy, fill=None, outline=None, width=1):
# Add rectangle to image (PIL-only)
self.draw.rectangle(xy, fill, outline, width)
- def text(self, xy, text, txt_color=(255, 255, 255)):
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
# Add text to image (PIL-only)
- w, h = self.font.getsize(text) # text width, height
- self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
def result(self):
# Return annotated image as array
@@ -171,26 +231,31 @@ def butter_lowpass(cutoff, fs, order):
return filtfilt(b, a, data) # forward-backward filter
-def output_to_target(output):
- # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
targets = []
for i, o in enumerate(output):
- for *box, conf, cls in o.cpu().numpy():
- targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
- return np.array(targets)
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
-def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
# Plot image grid with labels
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
- if np.max(images[0]) <= 1:
- images *= 255 # de-normalise (optional)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
@@ -210,12 +275,12 @@ def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max
# Annotate
fs = int((h + w) * ns * 0.01) # font size
- annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True)
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
- annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
@@ -307,11 +372,19 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
ax[i].set_title(s[i])
j = y[3].argmax() + 1
- ax2.plot(y[5, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
- 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
ax2.grid(alpha=0.2)
ax2.set_yticks(np.arange(20, 60, 5))
@@ -325,8 +398,7 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
plt.savefig(f, dpi=300)
-@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
-@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path('')):
# plot dataset labels
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
@@ -343,11 +415,12 @@ def plot_labels(labels, names=(), save_dir=Path('')):
matplotlib.use('svg') # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
- # [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # update colors bug #3195
+ with contextlib.suppress(Exception): # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
ax[0].set_ylabel('instances')
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
- ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel('classes')
sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
@@ -371,6 +444,35 @@ def plot_labels(labels, names=(), save_dir=Path('')):
plt.close()
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
# Plot evolve.csv hyp evolution results
evolve_csv = Path(evolve_csv)
@@ -381,6 +483,7 @@ def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *;
j = np.argmax(f) # max fitness index
plt.figure(figsize=(10, 12), tight_layout=True)
matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
for i, k in enumerate(keys[7:]):
v = x[:, 7 + i]
mu = v[j] # best single result
@@ -404,13 +507,13 @@ def plot_results(file='path/to/results.csv', dir=''):
ax = ax.ravel()
files = list(save_dir.glob('results*.csv'))
assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
- for fi, f in enumerate(files):
+ for f in files:
try:
data = pd.read_csv(f)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
- y = data.values[:, j]
+ y = data.values[:, j].astype('float')
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
ax[i].set_title(s[j], fontsize=12)
@@ -454,7 +557,7 @@ def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
-def save_one_box(xyxy, im, file='image.jpg', gain=1.02, pad=10, square=False, BGR=False, save=True):
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
# Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
xyxy = torch.tensor(xyxy).view(-1, 4)
b = xyxy2xywh(xyxy) # boxes
@@ -462,9 +565,11 @@ def save_one_box(xyxy, im, file='image.jpg', gain=1.02, pad=10, square=False, BG
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
- clip_coords(xyxy, im.shape)
+ clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
- cv2.imwrite(str(increment_path(file).with_suffix('.jpg')), crop)
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
return crop
diff --git a/utils/segment/__init__.py b/utils/segment/__init__.py
new file mode 100644
index 000000000000..e69de29bb2d1
diff --git a/utils/segment/augmentations.py b/utils/segment/augmentations.py
new file mode 100644
index 000000000000..169addedf0f5
--- /dev/null
+++ b/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/utils/segment/dataloaders.py b/utils/segment/dataloaders.py
new file mode 100644
index 000000000000..a63d6ec013fd
--- /dev/null
+++ b/utils/segment/dataloaders.py
@@ -0,0 +1,330 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+RANK = int(os.getenv('RANK', -1))
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + RANK)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/utils/segment/general.py b/utils/segment/general.py
new file mode 100644
index 000000000000..b526333dc5a1
--- /dev/null
+++ b/utils/segment/general.py
@@ -0,0 +1,137 @@
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+
+
+def crop_mask(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop_mask(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ """
+ # Rescale coordinates (xyxy) from im1_shape to im0_shape
+ if ratio_pad is None: # calculate from im0_shape
+ gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
+ pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
+ else:
+ pad = ratio_pad[1]
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ masks = masks[top:bottom, left:right]
+ # masks = masks.permute(2, 0, 1).contiguous()
+ # masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
+
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks2segments(masks, strategy='largest'):
+ # Convert masks(n,160,160) into segments(n,xy)
+ segments = []
+ for x in masks.int().cpu().numpy().astype('uint8'):
+ c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
+ if c:
+ if strategy == 'concat': # concatenate all segments
+ c = np.concatenate([x.reshape(-1, 2) for x in c])
+ elif strategy == 'largest': # select largest segment
+ c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
+ else:
+ c = np.zeros((0, 2)) # no segments found
+ segments.append(c.astype('float32'))
+ return segments
diff --git a/utils/segment/loss.py b/utils/segment/loss.py
new file mode 100644
index 000000000000..b45b2c27e0a0
--- /dev/null
+++ b/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop_mask
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/utils/segment/metrics.py b/utils/segment/metrics.py
new file mode 100644
index 000000000000..b09ce23fb9e3
--- /dev/null
+++ b/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/utils/segment/plots.py b/utils/segment/plots.py
new file mode 100644
index 000000000000..9b90900b3772
--- /dev/null
+++ b/utils/segment/plots.py
@@ -0,0 +1,143 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(bool)
+ else:
+ mask = image_masks[j].astype(bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11])
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index d958a8951074..04a3873854ee 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -3,12 +3,12 @@
PyTorch utils
"""
-import datetime
import math
import os
import platform
import subprocess
import time
+import warnings
from contextlib import contextmanager
from copy import deepcopy
from pathlib import Path
@@ -17,20 +17,76 @@
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
-from utils.general import LOGGER
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
try:
import thop # for FLOPs computation
except ImportError:
thop = None
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
@contextmanager
def torch_distributed_zero_first(local_rank: int):
- """
- Decorator to make all processes in distributed training wait for each local_master to do something.
- """
+ # Decorator to make all processes in distributed training wait for each local_master to do something
if local_rank not in [-1, 0]:
dist.barrier(device_ids=[local_rank])
yield
@@ -38,45 +94,30 @@ def torch_distributed_zero_first(local_rank: int):
dist.barrier(device_ids=[0])
-def date_modified(path=__file__):
- # return human-readable file modification date, i.e. '2021-3-26'
- t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
- return f'{t.year}-{t.month}-{t.day}'
-
-
-def git_describe(path=Path(__file__).parent): # path must be a directory
- # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
- s = f'git -C {path} describe --tags --long --always'
- try:
- return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
- except subprocess.CalledProcessError as e:
- return '' # not a git repository
-
-
def device_count():
- # Returns number of CUDA devices available. Safe version of torch.cuda.device_count().
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
try:
- cmd = 'nvidia-smi -L | wc -l'
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
- except Exception as e:
+ except Exception:
return 0
def select_device(device='', batch_size=0, newline=True):
- # device = 'cpu' or '0' or '0,1,2,3'
- s = f'YOLOv5 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
- device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
cpu = device == 'cpu'
- if cpu:
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
elif device: # non-cpu device requested
- nd = device_count() # number of CUDA devices
- assert nd > int(max(device.split(','))), f'Invalid `--device {device}` request, valid devices are 0 - {nd - 1}'
os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
- assert torch.cuda.is_available(), 'CUDA is not available, use `--device cpu` or do not pass a --device'
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
- cuda = not cpu and torch.cuda.is_available()
- if cuda:
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
@@ -84,34 +125,39 @@ def select_device(device='', batch_size=0, newline=True):
space = ' ' * (len(s) + 1)
for i, d in enumerate(devices):
p = torch.cuda.get_device_properties(i)
- s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2:.0f}MiB)\n" # bytes to MB
- else:
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
s += 'CPU\n'
+ arg = 'cpu'
if not newline:
s = s.rstrip()
- LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
- return torch.device('cuda:0' if cuda else 'cpu')
+ LOGGER.info(s)
+ return torch.device(arg)
def time_sync():
- # pytorch-accurate time
+ # PyTorch-accurate time
if torch.cuda.is_available():
torch.cuda.synchronize()
return time.time()
def profile(input, ops, n=10, device=None):
- # YOLOv5 speed/memory/FLOPs profiler
- #
- # Usage:
- # input = torch.randn(16, 3, 640, 640)
- # m1 = lambda x: x * torch.sigmoid(x)
- # m2 = nn.SiLU()
- # profile(input, [m1, m2], n=100) # profile over 100 iterations
-
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
results = []
- device = device or select_device()
+ if not isinstance(device, torch.device):
+ device = select_device(device)
print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
f"{'input':>24s}{'output':>24s}")
@@ -124,7 +170,7 @@ def profile(input, ops, n=10, device=None):
tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
try:
flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
- except:
+ except Exception:
flops = 0
try:
@@ -135,15 +181,14 @@ def profile(input, ops, n=10, device=None):
try:
_ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
t[2] = time_sync()
- except Exception as e: # no backward method
+ except Exception: # no backward method
# print(e) # for debug
t[2] = float('nan')
tf += (t[1] - t[0]) * 1000 / n # ms per op forward
tb += (t[2] - t[1]) * 1000 / n # ms per op backward
mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
- s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
- s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
- p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
results.append([p, flops, mem, tf, tb, s_in, s_out])
except Exception as e:
@@ -192,30 +237,30 @@ def sparsity(model):
def prune(model, amount=0.3):
# Prune model to requested global sparsity
import torch.nn.utils.prune as prune
- print('Pruning model... ', end='')
for name, m in model.named_modules():
if isinstance(m, nn.Conv2d):
prune.l1_unstructured(m, name='weight', amount=amount) # prune
prune.remove(m, 'weight') # make permanent
- print(' %.3g global sparsity' % sparsity(model))
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
def fuse_conv_and_bn(conv, bn):
- # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
fusedconv = nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
+ dilation=conv.dilation,
groups=conv.groups,
bias=True).requires_grad_(False).to(conv.weight.device)
- # prepare filters
+ # Prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
- # prepare spatial bias
+ # Prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
@@ -223,7 +268,7 @@ def fuse_conv_and_bn(conv, bn):
return fusedconv
-def model_info(model, verbose=False, img_size=640):
+def model_info(model, verbose=False, imgsz=640):
# Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
@@ -235,29 +280,29 @@ def model_info(model, verbose=False, img_size=640):
(i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
try: # FLOPs
- from thop import profile
- stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
- img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
- flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
- img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
- fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
- except (ImportError, Exception):
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
fs = ''
- LOGGER.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
- # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
- else:
- h, w = img.shape[2:]
- s = (int(h * ratio), int(w * ratio)) # new size
- img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
- if not same_shape: # pad/crop img
- h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
- return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
def copy_attr(a, b, include=(), exclude=()):
@@ -269,6 +314,69 @@ def copy_attr(a, b, include=(), exclude=()):
setattr(a, k, v)
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ for p_name, p in v.named_parameters(recurse=0):
+ if p_name == 'bias': # bias (no decay)
+ g[2].append(p)
+ elif p_name == 'weight' and isinstance(v, bn): # weight (no decay)
+ g[1].append(p)
+ else:
+ g[0].append(p) # weight (with decay)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
class EarlyStopping:
# YOLOv5 simple early stopper
def __init__(self, patience=30):
@@ -293,36 +401,30 @@ def __call__(self, epoch, fitness):
class ModelEMA:
- """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
- Keep a moving average of everything in the model state_dict (parameters and buffers).
- This is intended to allow functionality like
- https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
- A smoothed version of the weights is necessary for some training schemes to perform well.
- This class is sensitive where it is initialized in the sequence of model init,
- GPU assignment and distributed training wrappers.
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
"""
- def __init__(self, model, decay=0.9999, updates=0):
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
# Create EMA
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
- # if next(model.parameters()).device.type != 'cpu':
- # self.ema.half() # FP16 EMA
self.updates = updates # number of EMA updates
- self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
def update(self, model):
# Update EMA parameters
- with torch.no_grad():
- self.updates += 1
- d = self.decay(self.updates)
-
- msd = de_parallel(model).state_dict() # model state_dict
- for k, v in self.ema.state_dict().items():
- if v.dtype.is_floating_point:
- v *= d
- v += (1 - d) * msd[k].detach()
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point: # true for FP16 and FP32
+ v *= d
+ v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
# Update EMA attributes
diff --git a/utils/triton.py b/utils/triton.py
new file mode 100644
index 000000000000..a94ef0ad197d
--- /dev/null
+++ b/utils/triton.py
@@ -0,0 +1,85 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+""" Utils to interact with the Triton Inference Server
+"""
+
+import typing
+from urllib.parse import urlparse
+
+import torch
+
+
+class TritonRemoteModel:
+ """ A wrapper over a model served by the Triton Inference Server. It can
+ be configured to communicate over GRPC or HTTP. It accepts Torch Tensors
+ as input and returns them as outputs.
+ """
+
+ def __init__(self, url: str):
+ """
+ Keyword arguments:
+ url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
+ """
+
+ parsed_url = urlparse(url)
+ if parsed_url.scheme == "grpc":
+ from tritonclient.grpc import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository.models[0].name
+ self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ else:
+ from tritonclient.http import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository[0]['name']
+ self.metadata = self.client.get_model_metadata(self.model_name)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ self._create_input_placeholders_fn = create_input_placeholders
+
+ @property
+ def runtime(self):
+ """Returns the model runtime"""
+ return self.metadata.get("backend", self.metadata.get("platform"))
+
+ def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
+ """ Invokes the model. Parameters can be provided via args or kwargs.
+ args, if provided, are assumed to match the order of inputs of the model.
+ kwargs are matched with the model input names.
+ """
+ inputs = self._create_inputs(*args, **kwargs)
+ response = self.client.infer(model_name=self.model_name, inputs=inputs)
+ result = []
+ for output in self.metadata['outputs']:
+ tensor = torch.as_tensor(response.as_numpy(output['name']))
+ result.append(tensor)
+ return result[0] if len(result) == 1 else result
+
+ def _create_inputs(self, *args, **kwargs):
+ args_len, kwargs_len = len(args), len(kwargs)
+ if not args_len and not kwargs_len:
+ raise RuntimeError("No inputs provided.")
+ if args_len and kwargs_len:
+ raise RuntimeError("Cannot specify args and kwargs at the same time")
+
+ placeholders = self._create_input_placeholders_fn()
+ if args_len:
+ if args_len != len(placeholders):
+ raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
+ for input, value in zip(placeholders, args):
+ input.set_data_from_numpy(value.cpu().numpy())
+ else:
+ for input in placeholders:
+ value = kwargs[input.name]
+ input.set_data_from_numpy(value.cpu().numpy())
+ return placeholders
diff --git a/val.py b/val.py
index 843943b5ff7e..ca838c0beb2f 100644
--- a/val.py
+++ b/val.py
@@ -1,21 +1,22 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Validate a trained YOLOv5 model accuracy on a custom dataset
+Validate a trained YOLOv5 detection model on a detection dataset
Usage:
- $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
- $ python path/to/val.py --weights yolov5s.pt # PyTorch
- yolov5s.torchscript # TorchScript
- yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
- yolov5s.xml # OpenVINO
- yolov5s.engine # TensorRT
- yolov5s.mlmodel # CoreML (MacOS-only)
- yolov5s_saved_model # TensorFlow SavedModel
- yolov5s.pb # TensorFlow GraphDef
- yolov5s.tflite # TensorFlow Lite
- yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s_paddle_model # PaddlePaddle
"""
import argparse
@@ -23,7 +24,6 @@
import os
import sys
from pathlib import Path
-from threading import Thread
import numpy as np
import torch
@@ -37,13 +37,13 @@
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
-from utils.datasets import create_dataloader
-from utils.general import (LOGGER, box_iou, check_dataset, check_img_size, check_requirements, check_yaml,
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
- scale_coords, xywh2xyxy, xyxy2xywh)
-from utils.metrics import ConfusionMatrix, ap_per_class
+ scale_boxes, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
-from utils.torch_utils import select_device, time_sync
+from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
@@ -62,43 +62,47 @@ def save_one_json(predn, jdict, path, class_map):
box = xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
for p, b in zip(predn.tolist(), box.tolist()):
- jdict.append({'image_id': image_id,
- 'category_id': class_map[int(p[5])],
- 'bbox': [round(x, 3) for x in b],
- 'score': round(p[4], 5)})
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
def process_batch(detections, labels, iouv):
"""
- Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Return correct prediction matrix
Arguments:
- detections (Array[N, 6]), x1, y1, x2, y2, conf, class
- labels (Array[M, 5]), class, x1, y1, x2, y2
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
- correct (Array[N, 10]), for 10 IoU levels
+ correct (array[N, 10]), for 10 IoU levels
"""
- correct = torch.zeros(detections.shape[0], iouv.shape[0], dtype=torch.bool, device=iouv.device)
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
- x = torch.where((iou >= iouv[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match
- if x[0].shape[0]:
- matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]
- if x[0].shape[0] > 1:
- matches = matches[matches[:, 2].argsort()[::-1]]
- matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
- # matches = matches[matches[:, 2].argsort()[::-1]]
- matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
- matches = torch.Tensor(matches).to(iouv.device)
- correct[matches[:, 1].long()] = matches[:, 2:3] >= iouv
- return correct
-
-
-@torch.no_grad()
-def run(data,
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
weights=None, # model.pt path(s)
batch_size=32, # batch size
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
task='val', # train, val, test, speed or study
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
@@ -120,12 +124,11 @@ def run(data,
plots=True,
callbacks=Callbacks(),
compute_loss=None,
- ):
+):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
-
half &= device.type != 'cpu' # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
@@ -136,131 +139,149 @@ def run(data,
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
- model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data)
- stride, pt, jit, onnx, engine = model.stride, model.pt, model.jit, model.onnx, model.engine
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
- half &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16 supported on limited backends with CUDA
- if pt or jit:
- model.model.half() if half else model.model.float()
- elif engine:
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
batch_size = model.batch_size
else:
- half = False
- batch_size = 1 # export.py models default to batch-size 1
- device = torch.device('cpu')
- LOGGER.info(f'Forcing --batch-size 1 square inference shape(1,3,{imgsz},{imgsz}) for non-PyTorch backends')
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
# Data
data = check_dataset(data) # check
# Configure
model.eval()
- is_coco = isinstance(data.get('val'), str) and data['val'].endswith('coco/val2017.txt') # COCO dataset
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
nc = 1 if single_cls else int(data['nc']) # number of classes
- iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
# Dataloader
if not training:
- model.warmup(imgsz=(1, 3, imgsz, imgsz), half=half) # warmup
- pad = 0.0 if task == 'speed' else 0.5
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad, rect = (0.0, False) if task == 'speed' else (0.5, pt) # square inference for benchmarks
task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
- dataloader = create_dataloader(data[task], imgsz, batch_size, stride, single_cls, pad=pad, rect=pt,
- workers=workers, prefix=colorstr(f'{task}: '))[0]
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
- names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
- s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
- dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ dt = Profile(), Profile(), Profile() # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
- t1 = time_sync()
- if pt or jit or engine:
- im = im.to(device, non_blocking=True)
- targets = targets.to(device)
- im = im.half() if half else im.float() # uint8 to fp16/32
- im /= 255 # 0 - 255 to 0.0 - 1.0
- nb, _, height, width = im.shape # batch size, channels, height, width
- t2 = time_sync()
- dt[0] += t2 - t1
+ callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
- out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
- dt[1] += time_sync() - t2
+ with dt[1]:
+ preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
- loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+ loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
- targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
- t3 = time_sync()
- out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
- dt[2] += time_sync() - t3
+ with dt[2]:
+ preds = non_max_suppression(preds,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
# Metrics
- for si, pred in enumerate(out):
+ for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
- nl = len(labels)
- tcls = labels[:, 0].tolist() if nl else [] # target class
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
seen += 1
- if len(pred) == 0:
+ if npr == 0:
if nl:
- stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
continue
# Predictions
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
- scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+ scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
- scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
confusion_matrix.process_batch(predn, labelsn)
- else:
- correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool)
- stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls)) # (correct, conf, pcls, tcls)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
# Save/log
if save_txt:
- save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / (path.stem + '.txt'))
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
if save_json:
save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
# Plot images
if plots and batch_i < 3:
- f = save_dir / f'val_batch{batch_i}_labels.jpg' # labels
- Thread(target=plot_images, args=(im, targets, paths, f, names), daemon=True).start()
- f = save_dir / f'val_batch{batch_i}_pred.jpg' # predictions
- Thread(target=plot_images, args=(im, output_to_target(out), paths, f, names), daemon=True).start()
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(preds), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end', batch_i, im, targets, paths, shapes, preds)
# Compute metrics
- stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
if len(stats) and stats[0].any():
tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
- nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
- else:
- nt = torch.zeros(1)
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
- pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels')
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
@@ -268,7 +289,7 @@ def run(data,
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
- t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
@@ -276,7 +297,7 @@ def run(data,
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
- callbacks.run('on_val_end')
+ callbacks.run('on_val_end', nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
@@ -288,7 +309,7 @@ def run(data,
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements(['pycocotools'])
+ check_requirements('pycocotools')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -296,7 +317,7 @@ def run(data,
pred = anno.loadRes(pred_json) # init predictions api
eval = COCOeval(anno, pred, 'bbox')
if is_coco:
- eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
eval.evaluate()
eval.accumulate()
eval.summarize()
@@ -318,11 +339,12 @@ def run(data,
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
- parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
parser.add_argument('--batch-size', type=int, default=32, help='batch size')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
@@ -342,16 +364,18 @@ def parse_opt():
opt.data = check_yaml(opt.data) # check YAML
opt.save_json |= opt.data.endswith('coco.yaml')
opt.save_txt |= opt.save_hybrid
- print_args(FILE.stem, opt)
+ print_args(vars(opt))
return opt
def main(opt):
- check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
- LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} >> 0.001 will produce invalid mAP values.')
+ LOGGER.info(f'WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone')
run(**vars(opt))
else:
-
## Environments
YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
@@ -144,9 +155,8 @@ YOLOv5 may be run in any of the following up-to-date verified environments (with
- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
-
## Status

-If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/utils/loggers/wandb/sweep.py b/utils/loggers/wandb/sweep.py
index 206059bc30bf..d49ea6f2778b 100644
--- a/utils/loggers/wandb/sweep.py
+++ b/utils/loggers/wandb/sweep.py
@@ -16,8 +16,8 @@
def sweep():
wandb.init()
- # Get hyp dict from sweep agent
- hyp_dict = vars(wandb.config).get("_items")
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
# Workaround: get necessary opt args
opt = parse_opt(known=True)
diff --git a/utils/loggers/wandb/sweep.yaml b/utils/loggers/wandb/sweep.yaml
index c7790d75f6b2..688b1ea0285f 100644
--- a/utils/loggers/wandb/sweep.yaml
+++ b/utils/loggers/wandb/sweep.yaml
@@ -88,7 +88,7 @@ parameters:
fl_gamma:
distribution: uniform
min: 0.0
- max: 0.1
+ max: 4.0
hsv_h:
distribution: uniform
min: 0.0
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
index 221d3c88c56e..238f4edbf2a0 100644
--- a/utils/loggers/wandb/wandb_utils.py
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -15,7 +15,7 @@
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
-from utils.datasets import LoadImagesAndLabels, img2label_paths
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
from utils.general import LOGGER, check_dataset, check_file
try:
@@ -43,13 +43,16 @@ def check_wandb_config_file(data_config_file):
def check_wandb_dataset(data_file):
is_trainset_wandb_artifact = False
is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
if check_file(data_file) and data_file.endswith('.yaml'):
with open(data_file, errors='ignore') as f:
data_dict = yaml.safe_load(f)
- is_trainset_wandb_artifact = (isinstance(data_dict['train'], str) and
- data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX))
- is_valset_wandb_artifact = (isinstance(data_dict['val'], str) and
- data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX))
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
if is_trainset_wandb_artifact or is_valset_wandb_artifact:
return data_dict
else:
@@ -121,7 +124,7 @@ def __init__(self, opt, run_id=None, job_type='Training'):
"""
- Initialize WandbLogger instance
- Upload dataset if opt.upload_dataset is True
- - Setup trainig processes if job_type is 'Training'
+ - Setup training processes if job_type is 'Training'
arguments:
opt (namespace) -- Commandline arguments for this run
@@ -129,6 +132,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
job_type (str) -- To set the job_type for this run
"""
+ # Temporary-fix
+ if opt.upload_dataset:
+ opt.upload_dataset = False
+ # LOGGER.info("Uploading Dataset functionality is not being supported temporarily due to a bug.")
+
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
@@ -170,7 +178,11 @@ def __init__(self, opt, run_id=None, job_type='Training'):
if not opt.resume:
self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
- if opt.resume:
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
# resume from artifact
if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
self.data_dict = dict(self.wandb_run.config.data_dict)
@@ -181,8 +193,7 @@ def __init__(self, opt, run_id=None, job_type='Training'):
self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
# write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
- self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict},
- allow_val_change=True)
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
self.setup_training(opt)
if self.job_type == 'Dataset Creation':
@@ -200,8 +211,7 @@ def check_and_upload_dataset(self, opt):
Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
"""
assert wandb, 'Install wandb to upload dataset'
- config_path = self.log_dataset_artifact(opt.data,
- opt.single_cls,
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
with open(config_path, errors='ignore') as f:
wandb_data_dict = yaml.safe_load(f)
@@ -225,15 +235,15 @@ def setup_training(self, opt):
if modeldir:
self.weights = Path(modeldir) / "last.pt"
config = self.wandb_run.config
- opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
- self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \
- config.hyp
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
data_dict = self.data_dict
if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
- self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
- opt.artifact_alias)
- self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
- opt.artifact_alias)
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
if self.train_artifact_path is not None:
train_path = Path(self.train_artifact_path) / 'data/images/'
@@ -252,6 +262,8 @@ def setup_training(self, opt):
self.map_val_table_path()
if opt.bbox_interval == -1:
self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
# Update the the data_dict to point to local artifacts dir
if train_from_artifact:
@@ -288,7 +300,7 @@ def download_model_artifact(self, opt):
model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
modeldir = model_artifact.download()
- epochs_trained = model_artifact.metadata.get('epochs_trained')
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
total_epochs = model_artifact.metadata.get('total_epochs')
is_finished = total_epochs is None
assert not is_finished, 'training is finished, can only resume incomplete runs.'
@@ -306,14 +318,15 @@ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
fitness_score (float) -- fitness score for current epoch
best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
"""
- model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
- 'original_url': str(path),
- 'epochs_trained': epoch + 1,
- 'save period': opt.save_period,
- 'project': opt.project,
- 'total_epochs': opt.epochs,
- 'fitness_score': fitness_score
- })
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
wandb.log_artifact(model_artifact,
aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
@@ -342,13 +355,14 @@ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=
# log train set
if not log_val_only:
- self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
- data['train'], rect=True, batch_size=1), names, name='train') if data.get('train') else None
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
if data.get('train'):
data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
- self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
- data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
if data.get('val'):
data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
@@ -356,7 +370,7 @@ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=
# create a _wandb.yaml file with artifacts links if both train and test set are logged
if not log_val_only:
path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
- path = Path('data') / path
+ path = ROOT / 'data' / path
data.pop('download', None)
data.pop('path', None)
with open(path, 'w') as f:
@@ -401,7 +415,7 @@ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[i
# TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
artifact = wandb.Artifact(name=name, type="dataset")
img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
- img_files = tqdm(dataset.img_files) if not img_files else img_files
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
for img_file in img_files:
if Path(img_file).is_dir():
artifact.add_dir(img_file, name='data/images')
@@ -410,17 +424,21 @@ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[i
else:
artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
label_file = Path(img2label_paths([img_file])[0])
- artifact.add_file(str(label_file),
- name='data/labels/' + label_file.name) if label_file.exists() else None
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
box_data, img_classes = [], {}
for cls, *xywh in labels[:, 1:].tolist():
cls = int(cls)
- box_data.append({"position": {"middle": [xywh[0], xywh[1]], "width": xywh[2], "height": xywh[3]},
- "class_id": cls,
- "box_caption": "%s" % (class_to_id[cls])})
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
img_classes[cls] = class_to_id[cls]
boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
@@ -444,12 +462,17 @@ def log_training_progress(self, predn, path, names):
for *xyxy, conf, cls in predn.tolist():
if conf >= 0.25:
cls = int(cls)
- box_data.append(
- {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
- "class_id": cls,
- "box_caption": f"{names[cls]} {conf:.3f}",
- "scores": {"class_score": conf},
- "domain": "pixel"})
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
avg_conf_per_class[cls] += conf
if cls in pred_class_count:
@@ -462,12 +485,9 @@ def log_training_progress(self, predn, path, names):
boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
id = self.val_table_path_map[Path(path).name]
- self.result_table.add_data(self.current_epoch,
- id,
- self.val_table.data[id][1],
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
- *avg_conf_per_class
- )
+ *avg_conf_per_class)
def val_one_image(self, pred, predn, path, names, im):
"""
@@ -483,11 +503,17 @@ def val_one_image(self, pred, predn, path, names, im):
if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
if self.current_epoch % self.bbox_interval == 0:
- box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
- "class_id": int(cls),
- "box_caption": f"{names[cls]} {conf:.3f}",
- "scores": {"class_score": conf},
- "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
@@ -517,7 +543,8 @@ def end_epoch(self, best_result=False):
wandb.log(self.log_dict)
except BaseException as e:
LOGGER.info(
- f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}")
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
self.wandb_run.finish()
self.wandb_run = None
@@ -525,8 +552,10 @@ def end_epoch(self, best_result=False):
self.bbox_media_panel_images = []
if self.result_artifact:
self.result_artifact.add(self.result_table, 'result')
- wandb.log_artifact(self.result_artifact, aliases=['latest', 'last', 'epoch ' + str(self.current_epoch),
- ('best' if best_result else '')])
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
wandb.log({"evaluation": self.result_table})
columns = ["epoch", "id", "ground truth", "prediction"]
diff --git a/utils/loss.py b/utils/loss.py
index 5aa9f017d2af..9b9c3d9f8018 100644
--- a/utils/loss.py
+++ b/utils/loss.py
@@ -89,9 +89,10 @@ def forward(self, pred, true):
class ComputeLoss:
+ sort_obj_iou = False
+
# Compute losses
def __init__(self, model, autobalance=False):
- self.sort_obj_iou = False
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
@@ -107,46 +108,53 @@ def __init__(self, model, autobalance=False):
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
- det = de_parallel(model).model[-1] # Detect() module
- self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
- self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
- for k in 'na', 'nc', 'nl', 'anchors':
- setattr(self, k, getattr(det, k))
-
- def __call__(self, p, targets): # predictions, targets, model
- device = targets.device
- lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
- tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
- ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
# Regression
- pxy = ps[:, :2].sigmoid() * 2 - 0.5
- pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
- iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
- score_iou = iou.detach().clamp(0).type(tobj.dtype)
+ iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
- sort_id = torch.argsort(score_iou)
- b, a, gj, gi, score_iou = b[sort_id], a[sort_id], gj[sort_id], gi[sort_id], score_iou[sort_id]
- tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * score_iou # iou ratio
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
- t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
- lcls += self.BCEcls(ps[:, 5:], t) # BCE
+ lcls += self.BCEcls(pcls, t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
@@ -170,25 +178,31 @@ def build_targets(self, p, targets):
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
- gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
- ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
- targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
g = 0.5 # bias
- off = torch.tensor([[0, 0],
- [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
- # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
- ], device=targets.device).float() * g # offsets
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
for i in range(self.nl):
- anchors = self.anchors[i]
- gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
- t = targets * gain
+ t = targets * gain # shape(3,n,7)
if nt:
# Matches
- r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
@@ -206,15 +220,13 @@ def build_targets(self, p, targets):
offsets = 0
# Define
- b, c = t[:, :2].long().T # image, class
- gxy = t[:, 2:4] # grid xy
- gwh = t[:, 4:6] # grid wh
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
- gi, gj = gij.T # grid xy indices
+ gi, gj = gij.T # grid indices
# Append
- a = t[:, 6].long() # anchor indices
- indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
diff --git a/utils/metrics.py b/utils/metrics.py
index 83defa7fd186..f0bc787e1518 100644
--- a/utils/metrics.py
+++ b/utils/metrics.py
@@ -11,6 +11,8 @@
import numpy as np
import torch
+from utils import TryExcept, threaded
+
def fitness(x):
# Model fitness as a weighted combination of metrics
@@ -18,7 +20,15 @@ def fitness(x):
return (x[:, :4] * w).sum(1)
-def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
@@ -47,43 +57,42 @@ def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names
i = pred_cls == c
n_l = nt[ci] # number of labels
n_p = i.sum() # number of predictions
-
if n_p == 0 or n_l == 0:
continue
- else:
- # Accumulate FPs and TPs
- fpc = (1 - tp[i]).cumsum(0)
- tpc = tp[i].cumsum(0)
- # Recall
- recall = tpc / (n_l + eps) # recall curve
- r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
- # Precision
- precision = tpc / (tpc + fpc) # precision curve
- p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
- # AP from recall-precision curve
- for j in range(tp.shape[1]):
- ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
- if plot and j == 0:
- py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
# Compute F1 (harmonic mean of precision and recall)
f1 = 2 * p * r / (p + r + eps)
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
- names = {i: v for i, v in enumerate(names)} # to dict
+ names = dict(enumerate(names)) # to dict
if plot:
- plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
- plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
- plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
- plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
- i = f1.mean(0).argmax() # max F1 index
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
tp = (r * nt).round() # true positives
fp = (tp / (p + eps) - tp).round() # false positives
- return tp, fp, p, r, f1, ap, unique_classes.astype('int32')
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
def compute_ap(recall, precision):
@@ -132,6 +141,12 @@ def process_batch(self, detections, labels):
Returns:
None, updates confusion matrix accordingly
"""
+ if detections is None:
+ gt_classes = labels.int()
+ for gc in gt_classes:
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
detections = detections[detections[:, 4] > self.conf]
gt_classes = labels[:, 0].int()
detection_classes = detections[:, 5].int()
@@ -149,18 +164,18 @@ def process_batch(self, detections, labels):
matches = np.zeros((0, 3))
n = matches.shape[0] > 0
- m0, m1, _ = matches.transpose().astype(np.int16)
+ m0, m1, _ = matches.transpose().astype(int)
for i, gc in enumerate(gt_classes):
j = m0 == i
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
- self.matrix[self.nc, gc] += 1 # background FP
+ self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
- self.matrix[dc, self.nc] += 1 # background FN
+ self.matrix[dc, self.nc] += 1 # predicted background
def matrix(self):
return self.matrix
@@ -171,66 +186,74 @@ def tp_fp(self):
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
+ @TryExcept('WARNING ⚠️ ConfusionMatrix plot failure')
def plot(self, normalize=True, save_dir='', names=()):
- try:
- import seaborn as sn
-
- array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-6) if normalize else 1) # normalize columns
- array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
-
- fig = plt.figure(figsize=(12, 9), tight_layout=True)
- sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
- labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
- with warnings.catch_warnings():
- warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
- sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
- xticklabels=names + ['background FP'] if labels else "auto",
- yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
- fig.axes[0].set_xlabel('True')
- fig.axes[0].set_ylabel('Predicted')
- fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
- plt.close()
- except Exception as e:
- print(f'WARNING: ConfusionMatrix plot failure: {e}')
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ ticklabels = (names + ['background']) if labels else "auto"
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=ticklabels,
+ yticklabels=ticklabels).set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
def print(self):
for i in range(self.nc + 1):
print(' '.join(map(str, self.matrix[i])))
-def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
- # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
- box2 = box2.T
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
- if x1y1x2y2: # x1, y1, x2, y2 = box1
- b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
- b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
- else: # transform from xywh to xyxy
- b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
- b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
- b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
- b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
- w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
- w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
+ # IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
- rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
- (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
- v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
@@ -239,7 +262,13 @@ def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
-def box_iou(box1, box2):
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
@@ -252,30 +281,24 @@ def box_iou(box1, box2):
IoU values for every element in boxes1 and boxes2
"""
- def box_area(box):
- # box = 4xn
- return (box[2] - box[0]) * (box[3] - box[1])
-
- area1 = box_area(box1.T)
- area2 = box_area(box2.T)
-
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
- inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
- return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
-def bbox_ioa(box1, box2, eps=1E-7):
+
+def bbox_ioa(box1, box2, eps=1e-7):
""" Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
box1: np.array of shape(4)
box2: np.array of shape(nx4)
returns: np.array of shape(n)
"""
- box2 = box2.transpose()
-
# Get the coordinates of bounding boxes
- b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
- b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
# Intersection area
inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
@@ -288,17 +311,19 @@ def bbox_ioa(box1, box2, eps=1E-7):
return inter_area / box2_area
-def wh_iou(wh1, wh2):
+def wh_iou(wh1, wh2, eps=1e-7):
# Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
inter = torch.min(wh1, wh2).prod(2) # [N,M]
- return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
# Plots ----------------------------------------------------------------------------------------------------------------
-def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+
+@threaded
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
# Precision-recall curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
py = np.stack(py, axis=1)
@@ -314,12 +339,14 @@ def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
ax.set_ylabel('Precision')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- fig.savefig(Path(save_dir), dpi=250)
- plt.close()
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
-def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+@threaded
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
# Metric-confidence curve
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
@@ -329,12 +356,13 @@ def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence'
else:
ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
- y = py.mean(0)
+ y = smooth(py.mean(0), 0.05)
ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
- plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
- fig.savefig(Path(save_dir), dpi=250)
- plt.close()
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
diff --git a/utils/plots.py b/utils/plots.py
index 74868403edc0..36df271c60e1 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -3,10 +3,12 @@
Plotting utils
"""
+import contextlib
import math
import os
from copy import copy
from pathlib import Path
+from urllib.error import URLError
import cv2
import matplotlib
@@ -17,12 +19,13 @@
import torch
from PIL import Image, ImageDraw, ImageFont
-from utils.general import (LOGGER, Timeout, check_requirements, clip_coords, increment_path, is_ascii, is_chinese,
- try_except, user_config_dir, xywh2xyxy, xyxy2xywh)
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_boxes, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
from utils.metrics import fitness
+from utils.segment.general import scale_image
# Settings
-CONFIG_DIR = user_config_dir() # Ultralytics settings dir
RANK = int(os.getenv('RANK', -1))
matplotlib.rc('font', **{'size': 11})
matplotlib.use('Agg') # for writing to files only
@@ -32,9 +35,9 @@ class Colors:
# Ultralytics color palette https://ultralytics.com/
def __init__(self):
# hex = matplotlib.colors.TABLEAU_COLORS.values()
- hex = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
- '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
- self.palette = [self.hex2rgb('#' + c) for c in hex]
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
self.n = len(self.palette)
def __call__(self, i, bgr=False):
@@ -49,35 +52,33 @@ def hex2rgb(h): # rgb order (PIL)
colors = Colors() # create instance for 'from utils.plots import colors'
-def check_font(font='Arial.ttf', size=10):
+def check_pil_font(font=FONT, size=10):
# Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
font = Path(font)
font = font if font.exists() else (CONFIG_DIR / font.name)
try:
return ImageFont.truetype(str(font) if font.exists() else font.name, size)
- except Exception as e: # download if missing
- url = "https://ultralytics.com/assets/" + font.name
- LOGGER.info(f'Downloading {url} to {font}...')
- torch.hub.download_url_to_file(url, str(font), progress=False)
+ except Exception: # download if missing
try:
+ check_font(font)
return ImageFont.truetype(str(font), size)
except TypeError:
check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
class Annotator:
- if RANK in (-1, 0):
- check_font() # download TTF if necessary
-
# YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
- self.pil = pil or not is_ascii(example) or is_chinese(example)
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
if self.pil: # use PIL
self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
self.draw = ImageDraw.Draw(self.im)
- self.font = check_font(font='Arial.Unicode.ttf' if is_chinese(example) else font,
- size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
else: # use cv2
self.im = im
self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
@@ -89,10 +90,11 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if label:
w, h = self.font.getsize(label) # text width, height
outside = box[1] - h >= 0 # label fits outside box
- self.draw.rectangle([box[0],
- box[1] - h if outside else box[1],
- box[0] + w + 1,
- box[1] + 1 if outside else box[1] + h + 1], fill=color)
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
# self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
else: # cv2
@@ -101,20 +103,78 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if label:
tf = max(self.lw - 1, 1) # font thickness
w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
- outside = p1[1] - h - 3 >= 0 # label fits outside box
+ outside = p1[1] - h >= 3
p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
- cv2.putText(self.im, label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2), 0, self.lw / 3, txt_color,
- thickness=tf, lineType=cv2.LINE_AA)
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def masks(self, masks, colors, im_gpu=None, alpha=0.5):
+ """Plot masks at once.
+ Args:
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ im_gpu (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ alpha (float): mask transparency: 0.0 fully transparent, 1.0 opaque
+ """
+ if self.pil:
+ # convert to numpy first
+ self.im = np.asarray(self.im).copy()
+ if im_gpu is None:
+ # Add multiple masks of shape(h,w,n) with colors list([r,g,b], [r,g,b], ...)
+ if len(masks) == 0:
+ return
+ if isinstance(masks, torch.Tensor):
+ masks = torch.as_tensor(masks, dtype=torch.uint8)
+ masks = masks.permute(1, 2, 0).contiguous()
+ masks = masks.cpu().numpy()
+ # masks = np.ascontiguousarray(masks.transpose(1, 2, 0))
+ masks = scale_image(masks.shape[:2], masks, self.im.shape)
+ masks = np.asarray(masks, dtype=np.float32)
+ colors = np.asarray(colors, dtype=np.float32) # shape(n,3)
+ s = masks.sum(2, keepdims=True).clip(0, 1) # add all masks together
+ masks = (masks @ colors).clip(0, 255) # (h,w,n) @ (n,3) = (h,w,3)
+ self.im[:] = masks * alpha + self.im * (1 - s * alpha)
+ else:
+ if len(masks) == 0:
+ self.im[:] = im_gpu.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+ colors = torch.tensor(colors, device=im_gpu.device, dtype=torch.float32) / 255.0
+ colors = colors[:, None, None] # shape(n,1,1,3)
+ masks = masks.unsqueeze(3) # shape(n,h,w,1)
+ masks_color = masks * (colors * alpha) # shape(n,h,w,3)
+
+ inv_alph_masks = (1 - masks * alpha).cumprod(0) # shape(n,h,w,1)
+ mcs = (masks_color * inv_alph_masks).sum(0) * 2 # mask color summand shape(n,h,w,3)
+
+ im_gpu = im_gpu.flip(dims=[0]) # flip channel
+ im_gpu = im_gpu.permute(1, 2, 0).contiguous() # shape(h,w,3)
+ im_gpu = im_gpu * inv_alph_masks[-1] + mcs
+ im_mask = (im_gpu * 255).byte().cpu().numpy()
+ self.im[:] = scale_image(im_gpu.shape, im_mask, self.im.shape)
+ if self.pil:
+ # convert im back to PIL and update draw
+ self.fromarray(self.im)
def rectangle(self, xy, fill=None, outline=None, width=1):
# Add rectangle to image (PIL-only)
self.draw.rectangle(xy, fill, outline, width)
- def text(self, xy, text, txt_color=(255, 255, 255)):
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
# Add text to image (PIL-only)
- w, h = self.font.getsize(text) # text width, height
- self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
def result(self):
# Return annotated image as array
@@ -171,26 +231,31 @@ def butter_lowpass(cutoff, fs, order):
return filtfilt(b, a, data) # forward-backward filter
-def output_to_target(output):
- # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
targets = []
for i, o in enumerate(output):
- for *box, conf, cls in o.cpu().numpy():
- targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
- return np.array(targets)
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
-def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
# Plot image grid with labels
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
- if np.max(images[0]) <= 1:
- images *= 255 # de-normalise (optional)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
@@ -210,12 +275,12 @@ def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max
# Annotate
fs = int((h + w) * ns * 0.01) # font size
- annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True)
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
- annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
@@ -307,11 +372,19 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
ax[i].set_title(s[i])
j = y[3].argmax() + 1
- ax2.plot(y[5, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
- 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
ax2.grid(alpha=0.2)
ax2.set_yticks(np.arange(20, 60, 5))
@@ -325,8 +398,7 @@ def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_
plt.savefig(f, dpi=300)
-@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
-@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path('')):
# plot dataset labels
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
@@ -343,11 +415,12 @@ def plot_labels(labels, names=(), save_dir=Path('')):
matplotlib.use('svg') # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
- # [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # update colors bug #3195
+ with contextlib.suppress(Exception): # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
ax[0].set_ylabel('instances')
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
- ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel('classes')
sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
@@ -371,6 +444,35 @@ def plot_labels(labels, names=(), save_dir=Path('')):
plt.close()
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
# Plot evolve.csv hyp evolution results
evolve_csv = Path(evolve_csv)
@@ -381,6 +483,7 @@ def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *;
j = np.argmax(f) # max fitness index
plt.figure(figsize=(10, 12), tight_layout=True)
matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
for i, k in enumerate(keys[7:]):
v = x[:, 7 + i]
mu = v[j] # best single result
@@ -404,13 +507,13 @@ def plot_results(file='path/to/results.csv', dir=''):
ax = ax.ravel()
files = list(save_dir.glob('results*.csv'))
assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
- for fi, f in enumerate(files):
+ for f in files:
try:
data = pd.read_csv(f)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
- y = data.values[:, j]
+ y = data.values[:, j].astype('float')
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
ax[i].set_title(s[j], fontsize=12)
@@ -454,7 +557,7 @@ def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
-def save_one_box(xyxy, im, file='image.jpg', gain=1.02, pad=10, square=False, BGR=False, save=True):
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
# Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
xyxy = torch.tensor(xyxy).view(-1, 4)
b = xyxy2xywh(xyxy) # boxes
@@ -462,9 +565,11 @@ def save_one_box(xyxy, im, file='image.jpg', gain=1.02, pad=10, square=False, BG
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
- clip_coords(xyxy, im.shape)
+ clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
- cv2.imwrite(str(increment_path(file).with_suffix('.jpg')), crop)
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
return crop
diff --git a/utils/segment/__init__.py b/utils/segment/__init__.py
new file mode 100644
index 000000000000..e69de29bb2d1
diff --git a/utils/segment/augmentations.py b/utils/segment/augmentations.py
new file mode 100644
index 000000000000..169addedf0f5
--- /dev/null
+++ b/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/utils/segment/dataloaders.py b/utils/segment/dataloaders.py
new file mode 100644
index 000000000000..a63d6ec013fd
--- /dev/null
+++ b/utils/segment/dataloaders.py
@@ -0,0 +1,330 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+RANK = int(os.getenv('RANK', -1))
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(6148914691236517205 + RANK)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/utils/segment/general.py b/utils/segment/general.py
new file mode 100644
index 000000000000..b526333dc5a1
--- /dev/null
+++ b/utils/segment/general.py
@@ -0,0 +1,137 @@
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+
+
+def crop_mask(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop_mask(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop_mask(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ """
+ # Rescale coordinates (xyxy) from im1_shape to im0_shape
+ if ratio_pad is None: # calculate from im0_shape
+ gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
+ pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
+ else:
+ pad = ratio_pad[1]
+ top, left = int(pad[1]), int(pad[0]) # y, x
+ bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ masks = masks[top:bottom, left:right]
+ # masks = masks.permute(2, 0, 1).contiguous()
+ # masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
+
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks2segments(masks, strategy='largest'):
+ # Convert masks(n,160,160) into segments(n,xy)
+ segments = []
+ for x in masks.int().cpu().numpy().astype('uint8'):
+ c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
+ if c:
+ if strategy == 'concat': # concatenate all segments
+ c = np.concatenate([x.reshape(-1, 2) for x in c])
+ elif strategy == 'largest': # select largest segment
+ c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
+ else:
+ c = np.zeros((0, 2)) # no segments found
+ segments.append(c.astype('float32'))
+ return segments
diff --git a/utils/segment/loss.py b/utils/segment/loss.py
new file mode 100644
index 000000000000..b45b2c27e0a0
--- /dev/null
+++ b/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop_mask
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/utils/segment/metrics.py b/utils/segment/metrics.py
new file mode 100644
index 000000000000..b09ce23fb9e3
--- /dev/null
+++ b/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/utils/segment/plots.py b/utils/segment/plots.py
new file mode 100644
index 000000000000..9b90900b3772
--- /dev/null
+++ b/utils/segment/plots.py
@@ -0,0 +1,143 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(bool)
+ else:
+ mask = image_masks[j].astype(bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11])
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index d958a8951074..04a3873854ee 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -3,12 +3,12 @@
PyTorch utils
"""
-import datetime
import math
import os
import platform
import subprocess
import time
+import warnings
from contextlib import contextmanager
from copy import deepcopy
from pathlib import Path
@@ -17,20 +17,76 @@
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
-from utils.general import LOGGER
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
try:
import thop # for FLOPs computation
except ImportError:
thop = None
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
@contextmanager
def torch_distributed_zero_first(local_rank: int):
- """
- Decorator to make all processes in distributed training wait for each local_master to do something.
- """
+ # Decorator to make all processes in distributed training wait for each local_master to do something
if local_rank not in [-1, 0]:
dist.barrier(device_ids=[local_rank])
yield
@@ -38,45 +94,30 @@ def torch_distributed_zero_first(local_rank: int):
dist.barrier(device_ids=[0])
-def date_modified(path=__file__):
- # return human-readable file modification date, i.e. '2021-3-26'
- t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
- return f'{t.year}-{t.month}-{t.day}'
-
-
-def git_describe(path=Path(__file__).parent): # path must be a directory
- # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
- s = f'git -C {path} describe --tags --long --always'
- try:
- return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
- except subprocess.CalledProcessError as e:
- return '' # not a git repository
-
-
def device_count():
- # Returns number of CUDA devices available. Safe version of torch.cuda.device_count().
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
try:
- cmd = 'nvidia-smi -L | wc -l'
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
- except Exception as e:
+ except Exception:
return 0
def select_device(device='', batch_size=0, newline=True):
- # device = 'cpu' or '0' or '0,1,2,3'
- s = f'YOLOv5 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
- device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
cpu = device == 'cpu'
- if cpu:
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
elif device: # non-cpu device requested
- nd = device_count() # number of CUDA devices
- assert nd > int(max(device.split(','))), f'Invalid `--device {device}` request, valid devices are 0 - {nd - 1}'
os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
- assert torch.cuda.is_available(), 'CUDA is not available, use `--device cpu` or do not pass a --device'
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
- cuda = not cpu and torch.cuda.is_available()
- if cuda:
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
@@ -84,34 +125,39 @@ def select_device(device='', batch_size=0, newline=True):
space = ' ' * (len(s) + 1)
for i, d in enumerate(devices):
p = torch.cuda.get_device_properties(i)
- s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2:.0f}MiB)\n" # bytes to MB
- else:
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
s += 'CPU\n'
+ arg = 'cpu'
if not newline:
s = s.rstrip()
- LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
- return torch.device('cuda:0' if cuda else 'cpu')
+ LOGGER.info(s)
+ return torch.device(arg)
def time_sync():
- # pytorch-accurate time
+ # PyTorch-accurate time
if torch.cuda.is_available():
torch.cuda.synchronize()
return time.time()
def profile(input, ops, n=10, device=None):
- # YOLOv5 speed/memory/FLOPs profiler
- #
- # Usage:
- # input = torch.randn(16, 3, 640, 640)
- # m1 = lambda x: x * torch.sigmoid(x)
- # m2 = nn.SiLU()
- # profile(input, [m1, m2], n=100) # profile over 100 iterations
-
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
results = []
- device = device or select_device()
+ if not isinstance(device, torch.device):
+ device = select_device(device)
print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
f"{'input':>24s}{'output':>24s}")
@@ -124,7 +170,7 @@ def profile(input, ops, n=10, device=None):
tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
try:
flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
- except:
+ except Exception:
flops = 0
try:
@@ -135,15 +181,14 @@ def profile(input, ops, n=10, device=None):
try:
_ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
t[2] = time_sync()
- except Exception as e: # no backward method
+ except Exception: # no backward method
# print(e) # for debug
t[2] = float('nan')
tf += (t[1] - t[0]) * 1000 / n # ms per op forward
tb += (t[2] - t[1]) * 1000 / n # ms per op backward
mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
- s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
- s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
- p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
results.append([p, flops, mem, tf, tb, s_in, s_out])
except Exception as e:
@@ -192,30 +237,30 @@ def sparsity(model):
def prune(model, amount=0.3):
# Prune model to requested global sparsity
import torch.nn.utils.prune as prune
- print('Pruning model... ', end='')
for name, m in model.named_modules():
if isinstance(m, nn.Conv2d):
prune.l1_unstructured(m, name='weight', amount=amount) # prune
prune.remove(m, 'weight') # make permanent
- print(' %.3g global sparsity' % sparsity(model))
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
def fuse_conv_and_bn(conv, bn):
- # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
fusedconv = nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
+ dilation=conv.dilation,
groups=conv.groups,
bias=True).requires_grad_(False).to(conv.weight.device)
- # prepare filters
+ # Prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
- # prepare spatial bias
+ # Prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
@@ -223,7 +268,7 @@ def fuse_conv_and_bn(conv, bn):
return fusedconv
-def model_info(model, verbose=False, img_size=640):
+def model_info(model, verbose=False, imgsz=640):
# Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
@@ -235,29 +280,29 @@ def model_info(model, verbose=False, img_size=640):
(i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
try: # FLOPs
- from thop import profile
- stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
- img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
- flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
- img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
- fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
- except (ImportError, Exception):
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
fs = ''
- LOGGER.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
- # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
- else:
- h, w = img.shape[2:]
- s = (int(h * ratio), int(w * ratio)) # new size
- img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
- if not same_shape: # pad/crop img
- h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
- return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
def copy_attr(a, b, include=(), exclude=()):
@@ -269,6 +314,69 @@ def copy_attr(a, b, include=(), exclude=()):
setattr(a, k, v)
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ for p_name, p in v.named_parameters(recurse=0):
+ if p_name == 'bias': # bias (no decay)
+ g[2].append(p)
+ elif p_name == 'weight' and isinstance(v, bn): # weight (no decay)
+ g[1].append(p)
+ else:
+ g[0].append(p) # weight (with decay)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
class EarlyStopping:
# YOLOv5 simple early stopper
def __init__(self, patience=30):
@@ -293,36 +401,30 @@ def __call__(self, epoch, fitness):
class ModelEMA:
- """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
- Keep a moving average of everything in the model state_dict (parameters and buffers).
- This is intended to allow functionality like
- https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
- A smoothed version of the weights is necessary for some training schemes to perform well.
- This class is sensitive where it is initialized in the sequence of model init,
- GPU assignment and distributed training wrappers.
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
"""
- def __init__(self, model, decay=0.9999, updates=0):
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
# Create EMA
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
- # if next(model.parameters()).device.type != 'cpu':
- # self.ema.half() # FP16 EMA
self.updates = updates # number of EMA updates
- self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
def update(self, model):
# Update EMA parameters
- with torch.no_grad():
- self.updates += 1
- d = self.decay(self.updates)
-
- msd = de_parallel(model).state_dict() # model state_dict
- for k, v in self.ema.state_dict().items():
- if v.dtype.is_floating_point:
- v *= d
- v += (1 - d) * msd[k].detach()
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point: # true for FP16 and FP32
+ v *= d
+ v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
# Update EMA attributes
diff --git a/utils/triton.py b/utils/triton.py
new file mode 100644
index 000000000000..a94ef0ad197d
--- /dev/null
+++ b/utils/triton.py
@@ -0,0 +1,85 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+""" Utils to interact with the Triton Inference Server
+"""
+
+import typing
+from urllib.parse import urlparse
+
+import torch
+
+
+class TritonRemoteModel:
+ """ A wrapper over a model served by the Triton Inference Server. It can
+ be configured to communicate over GRPC or HTTP. It accepts Torch Tensors
+ as input and returns them as outputs.
+ """
+
+ def __init__(self, url: str):
+ """
+ Keyword arguments:
+ url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
+ """
+
+ parsed_url = urlparse(url)
+ if parsed_url.scheme == "grpc":
+ from tritonclient.grpc import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository.models[0].name
+ self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ else:
+ from tritonclient.http import InferenceServerClient, InferInput
+
+ self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
+ model_repository = self.client.get_model_repository_index()
+ self.model_name = model_repository[0]['name']
+ self.metadata = self.client.get_model_metadata(self.model_name)
+
+ def create_input_placeholders() -> typing.List[InferInput]:
+ return [
+ InferInput(i['name'], [int(s) for s in i["shape"]], i['datatype']) for i in self.metadata['inputs']]
+
+ self._create_input_placeholders_fn = create_input_placeholders
+
+ @property
+ def runtime(self):
+ """Returns the model runtime"""
+ return self.metadata.get("backend", self.metadata.get("platform"))
+
+ def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
+ """ Invokes the model. Parameters can be provided via args or kwargs.
+ args, if provided, are assumed to match the order of inputs of the model.
+ kwargs are matched with the model input names.
+ """
+ inputs = self._create_inputs(*args, **kwargs)
+ response = self.client.infer(model_name=self.model_name, inputs=inputs)
+ result = []
+ for output in self.metadata['outputs']:
+ tensor = torch.as_tensor(response.as_numpy(output['name']))
+ result.append(tensor)
+ return result[0] if len(result) == 1 else result
+
+ def _create_inputs(self, *args, **kwargs):
+ args_len, kwargs_len = len(args), len(kwargs)
+ if not args_len and not kwargs_len:
+ raise RuntimeError("No inputs provided.")
+ if args_len and kwargs_len:
+ raise RuntimeError("Cannot specify args and kwargs at the same time")
+
+ placeholders = self._create_input_placeholders_fn()
+ if args_len:
+ if args_len != len(placeholders):
+ raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
+ for input, value in zip(placeholders, args):
+ input.set_data_from_numpy(value.cpu().numpy())
+ else:
+ for input in placeholders:
+ value = kwargs[input.name]
+ input.set_data_from_numpy(value.cpu().numpy())
+ return placeholders
diff --git a/val.py b/val.py
index 843943b5ff7e..ca838c0beb2f 100644
--- a/val.py
+++ b/val.py
@@ -1,21 +1,22 @@
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
-Validate a trained YOLOv5 model accuracy on a custom dataset
+Validate a trained YOLOv5 detection model on a detection dataset
Usage:
- $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
- $ python path/to/val.py --weights yolov5s.pt # PyTorch
- yolov5s.torchscript # TorchScript
- yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
- yolov5s.xml # OpenVINO
- yolov5s.engine # TensorRT
- yolov5s.mlmodel # CoreML (MacOS-only)
- yolov5s_saved_model # TensorFlow SavedModel
- yolov5s.pb # TensorFlow GraphDef
- yolov5s.tflite # TensorFlow Lite
- yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+ yolov5s_paddle_model # PaddlePaddle
"""
import argparse
@@ -23,7 +24,6 @@
import os
import sys
from pathlib import Path
-from threading import Thread
import numpy as np
import torch
@@ -37,13 +37,13 @@
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
-from utils.datasets import create_dataloader
-from utils.general import (LOGGER, box_iou, check_dataset, check_img_size, check_requirements, check_yaml,
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
- scale_coords, xywh2xyxy, xyxy2xywh)
-from utils.metrics import ConfusionMatrix, ap_per_class
+ scale_boxes, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
-from utils.torch_utils import select_device, time_sync
+from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
@@ -62,43 +62,47 @@ def save_one_json(predn, jdict, path, class_map):
box = xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
for p, b in zip(predn.tolist(), box.tolist()):
- jdict.append({'image_id': image_id,
- 'category_id': class_map[int(p[5])],
- 'bbox': [round(x, 3) for x in b],
- 'score': round(p[4], 5)})
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
def process_batch(detections, labels, iouv):
"""
- Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Return correct prediction matrix
Arguments:
- detections (Array[N, 6]), x1, y1, x2, y2, conf, class
- labels (Array[M, 5]), class, x1, y1, x2, y2
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
- correct (Array[N, 10]), for 10 IoU levels
+ correct (array[N, 10]), for 10 IoU levels
"""
- correct = torch.zeros(detections.shape[0], iouv.shape[0], dtype=torch.bool, device=iouv.device)
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
- x = torch.where((iou >= iouv[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match
- if x[0].shape[0]:
- matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]
- if x[0].shape[0] > 1:
- matches = matches[matches[:, 2].argsort()[::-1]]
- matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
- # matches = matches[matches[:, 2].argsort()[::-1]]
- matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
- matches = torch.Tensor(matches).to(iouv.device)
- correct[matches[:, 1].long()] = matches[:, 2:3] >= iouv
- return correct
-
-
-@torch.no_grad()
-def run(data,
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
weights=None, # model.pt path(s)
batch_size=32, # batch size
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
task='val', # train, val, test, speed or study
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
@@ -120,12 +124,11 @@ def run(data,
plots=True,
callbacks=Callbacks(),
compute_loss=None,
- ):
+):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
-
half &= device.type != 'cpu' # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
@@ -136,131 +139,149 @@ def run(data,
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
- model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data)
- stride, pt, jit, onnx, engine = model.stride, model.pt, model.jit, model.onnx, model.engine
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
- half &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16 supported on limited backends with CUDA
- if pt or jit:
- model.model.half() if half else model.model.float()
- elif engine:
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
batch_size = model.batch_size
else:
- half = False
- batch_size = 1 # export.py models default to batch-size 1
- device = torch.device('cpu')
- LOGGER.info(f'Forcing --batch-size 1 square inference shape(1,3,{imgsz},{imgsz}) for non-PyTorch backends')
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
# Data
data = check_dataset(data) # check
# Configure
model.eval()
- is_coco = isinstance(data.get('val'), str) and data['val'].endswith('coco/val2017.txt') # COCO dataset
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
nc = 1 if single_cls else int(data['nc']) # number of classes
- iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
# Dataloader
if not training:
- model.warmup(imgsz=(1, 3, imgsz, imgsz), half=half) # warmup
- pad = 0.0 if task == 'speed' else 0.5
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad, rect = (0.0, False) if task == 'speed' else (0.5, pt) # square inference for benchmarks
task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
- dataloader = create_dataloader(data[task], imgsz, batch_size, stride, single_cls, pad=pad, rect=pt,
- workers=workers, prefix=colorstr(f'{task}: '))[0]
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
- names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
- s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
- dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ dt = Profile(), Profile(), Profile() # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
- t1 = time_sync()
- if pt or jit or engine:
- im = im.to(device, non_blocking=True)
- targets = targets.to(device)
- im = im.half() if half else im.float() # uint8 to fp16/32
- im /= 255 # 0 - 255 to 0.0 - 1.0
- nb, _, height, width = im.shape # batch size, channels, height, width
- t2 = time_sync()
- dt[0] += t2 - t1
+ callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
- out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
- dt[1] += time_sync() - t2
+ with dt[1]:
+ preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
- loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+ loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
- targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
- t3 = time_sync()
- out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
- dt[2] += time_sync() - t3
+ with dt[2]:
+ preds = non_max_suppression(preds,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
# Metrics
- for si, pred in enumerate(out):
+ for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
- nl = len(labels)
- tcls = labels[:, 0].tolist() if nl else [] # target class
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
seen += 1
- if len(pred) == 0:
+ if npr == 0:
if nl:
- stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
continue
# Predictions
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
- scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+ scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
- scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
confusion_matrix.process_batch(predn, labelsn)
- else:
- correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool)
- stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls)) # (correct, conf, pcls, tcls)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
# Save/log
if save_txt:
- save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / (path.stem + '.txt'))
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
if save_json:
save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
# Plot images
if plots and batch_i < 3:
- f = save_dir / f'val_batch{batch_i}_labels.jpg' # labels
- Thread(target=plot_images, args=(im, targets, paths, f, names), daemon=True).start()
- f = save_dir / f'val_batch{batch_i}_pred.jpg' # predictions
- Thread(target=plot_images, args=(im, output_to_target(out), paths, f, names), daemon=True).start()
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(preds), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end', batch_i, im, targets, paths, shapes, preds)
# Compute metrics
- stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
if len(stats) and stats[0].any():
tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
- nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
- else:
- nt = torch.zeros(1)
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
- pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels')
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
@@ -268,7 +289,7 @@ def run(data,
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
- t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
@@ -276,7 +297,7 @@ def run(data,
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
- callbacks.run('on_val_end')
+ callbacks.run('on_val_end', nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
@@ -288,7 +309,7 @@ def run(data,
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements(['pycocotools'])
+ check_requirements('pycocotools')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -296,7 +317,7 @@ def run(data,
pred = anno.loadRes(pred_json) # init predictions api
eval = COCOeval(anno, pred, 'bbox')
if is_coco:
- eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
eval.evaluate()
eval.accumulate()
eval.summarize()
@@ -318,11 +339,12 @@ def run(data,
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
- parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
parser.add_argument('--batch-size', type=int, default=32, help='batch size')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
@@ -342,16 +364,18 @@ def parse_opt():
opt.data = check_yaml(opt.data) # check YAML
opt.save_json |= opt.data.endswith('coco.yaml')
opt.save_txt |= opt.save_hybrid
- print_args(FILE.stem, opt)
+ print_args(vars(opt))
return opt
def main(opt):
- check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
- LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} >> 0.001 will produce invalid mAP values.')
+ LOGGER.info(f'WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone')
run(**vars(opt))
else: